Robot Machining (5x)
はじめに
この例題では、RoboDKでロボット加工の設定を行う方法と、5軸ロボット加工ジョブをロボット加工シミュレーションとロボットプログラムに変換する方法をご紹介します。
CAMソフトウェアで加工ストラテジーを定義したら、加工プログラムをGコードまたはAPTファイルとしてエクスポートし、RoboDKに読み込ませてロボット加工プロジェクトを作成することができます。この例では、APT ファイルを使用してロボット加工プロジェクトを作成します。
このサンプルRoboDKプロジェクトは以下の場所にあります:C:/RoboDK/Other/Plugin-MecSoft/Car-Model.rdk.
サンプルRDKプロジェクトはC:/RoboDK/Other/Plugin-MecSoft/Car-Model.rdkフォルダにあります。
ビデオ5軸ロボット加工のためのRoboDKロボット加工機能の使い方:https://www.youtube.com/watch?v=Pv7LljFTtI0.
ロボット加工例(5軸)
この例では、一般的な5軸加工プログラムをRhinoCAMからエクスポートしています。すべての加工を1つのファイルとしてポストし、RoboDKで開くことができます。
この例では、加工ジョブをロボット加工シミュレーションとロボットプログラムに変換する方法を学びます。具体的には、GコードやAPTファイルなどのNCファイルから、ロボットコントローラに有効なロボットプログラムを生成する方法を。
ヒントRoboDKで利用可能なロボット加工設定の詳細については、ロボット加工のセクションをご覧ください。
RhinoCAMでの加工プログラム
ここでは Mecsoft RhinoCAM から RoboDK に加工プログラムをエクスポートする方法を説明します。APT ファイルを使用して RoboDK にツールパスをロードし、カスタム BAT ファイルを使用して自動的に送信します。
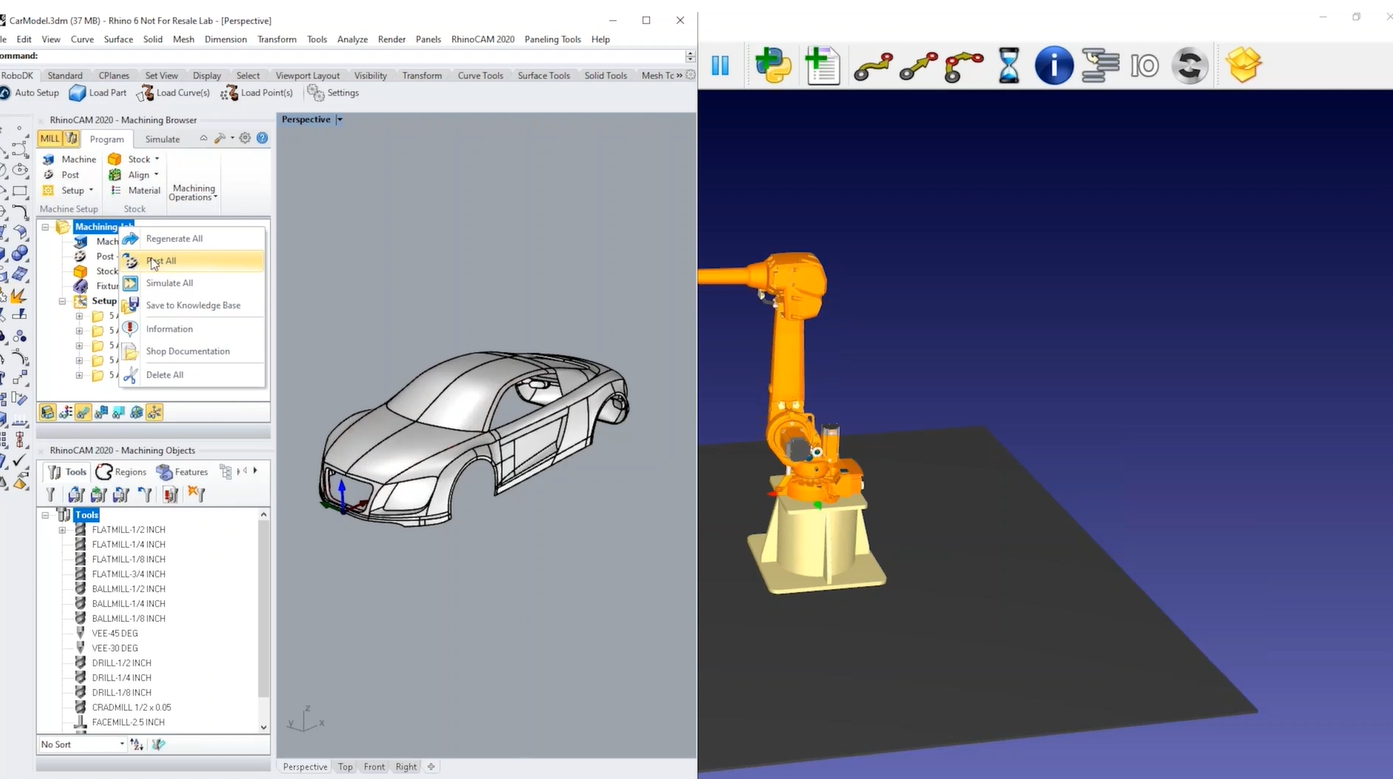
RhinoCAMで以下の手順に従って加工プログラムをRoboDKにエクスポートします:
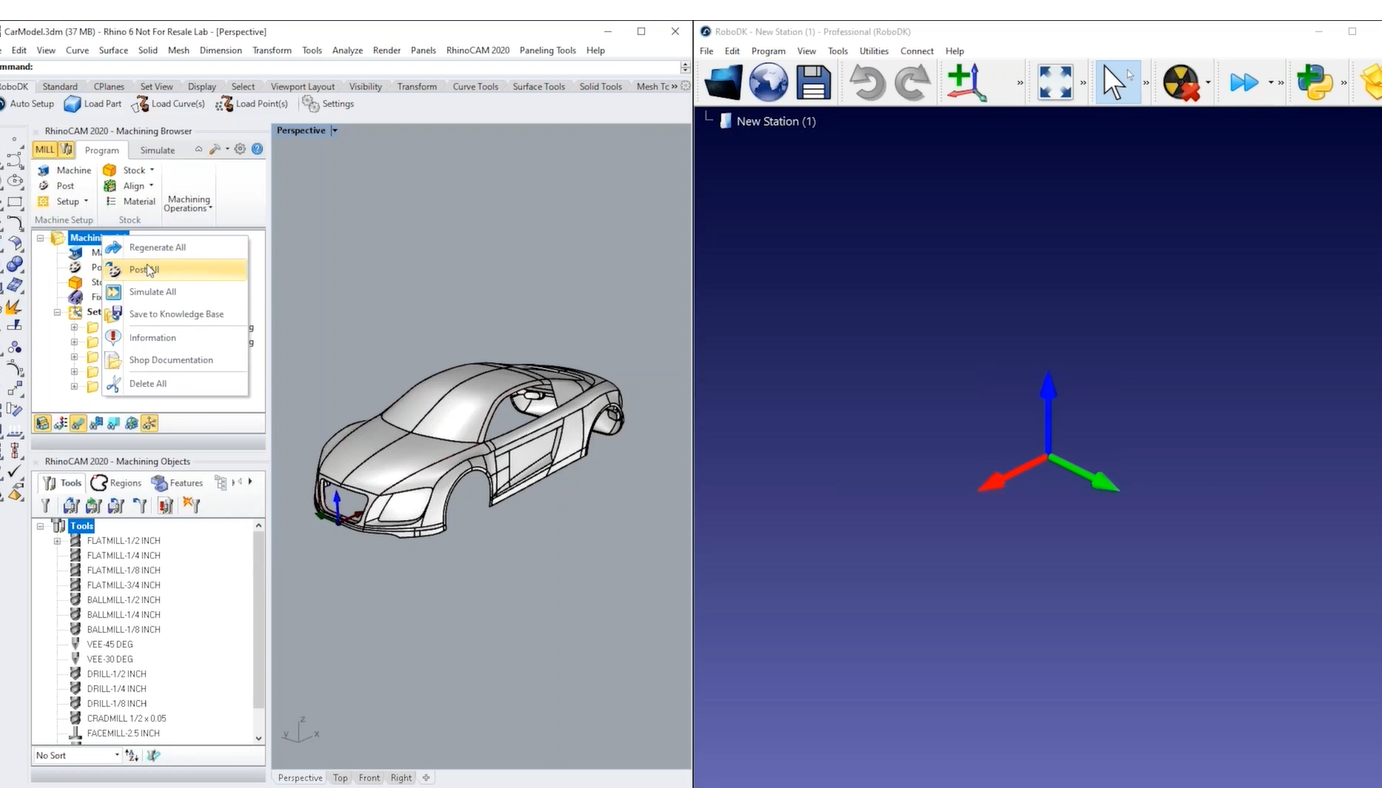
1.RhinoCAMからプロジェクトを右クリックします。
2.Post Allを選択すると、加工プログラムが生成され、RoboDKに自動的にロードされます。
ロボット加工プロジェクト(5倍)
このセクションでは、ロボットのセットアップと加工ツールパスをカスタマイズして、ロボット加工を成功させる方法を紹介します。RoboDKの加工プロジェクトでは、一般的な5軸加工をロボットシミュレーションとロボットプログラムに変換することができます。
RoboDKでは、各加工がロボット加工プロジェクトとして自動的に分割されていることがわかります。また、KUKAセルが加工プログラムと共にデフォルトでロードされていることもわかります。これは、カスタムbatファイルを使用してRhinoCAMからファイルをポストしたためです。
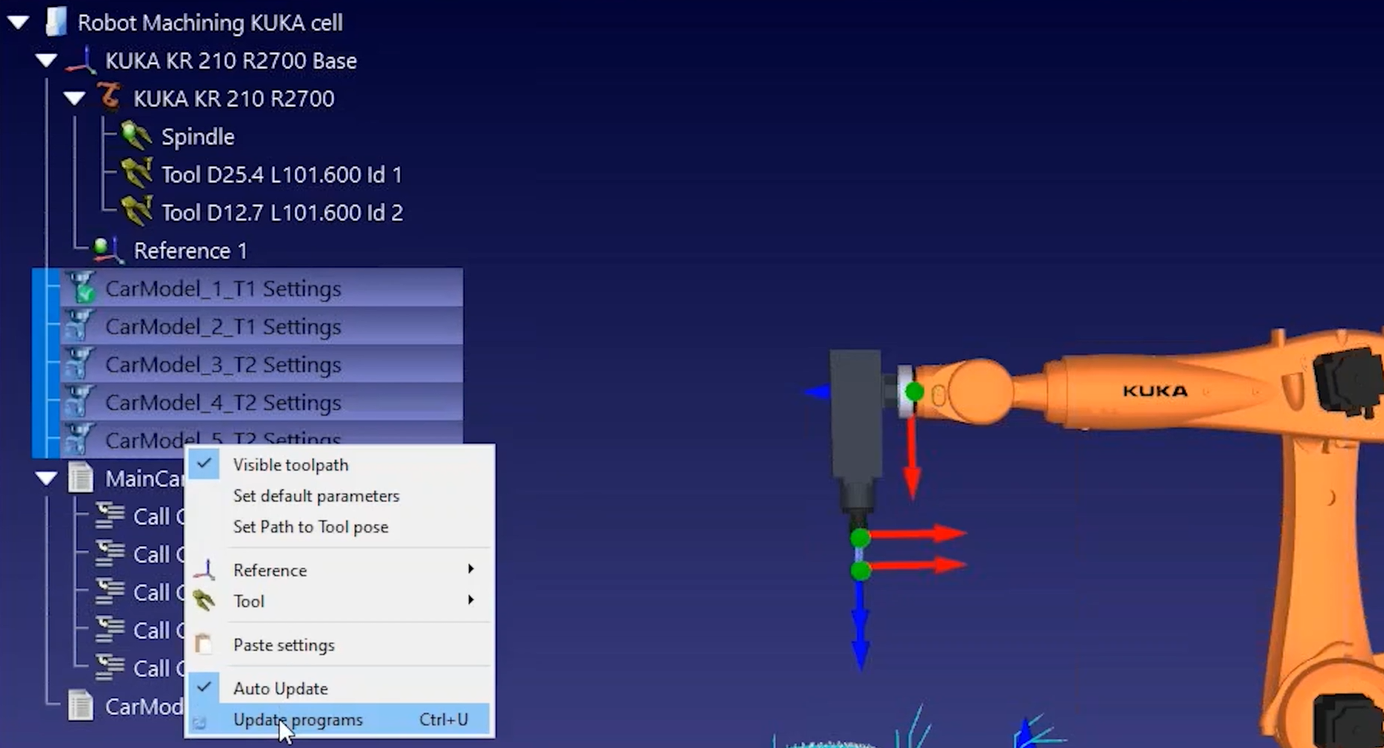
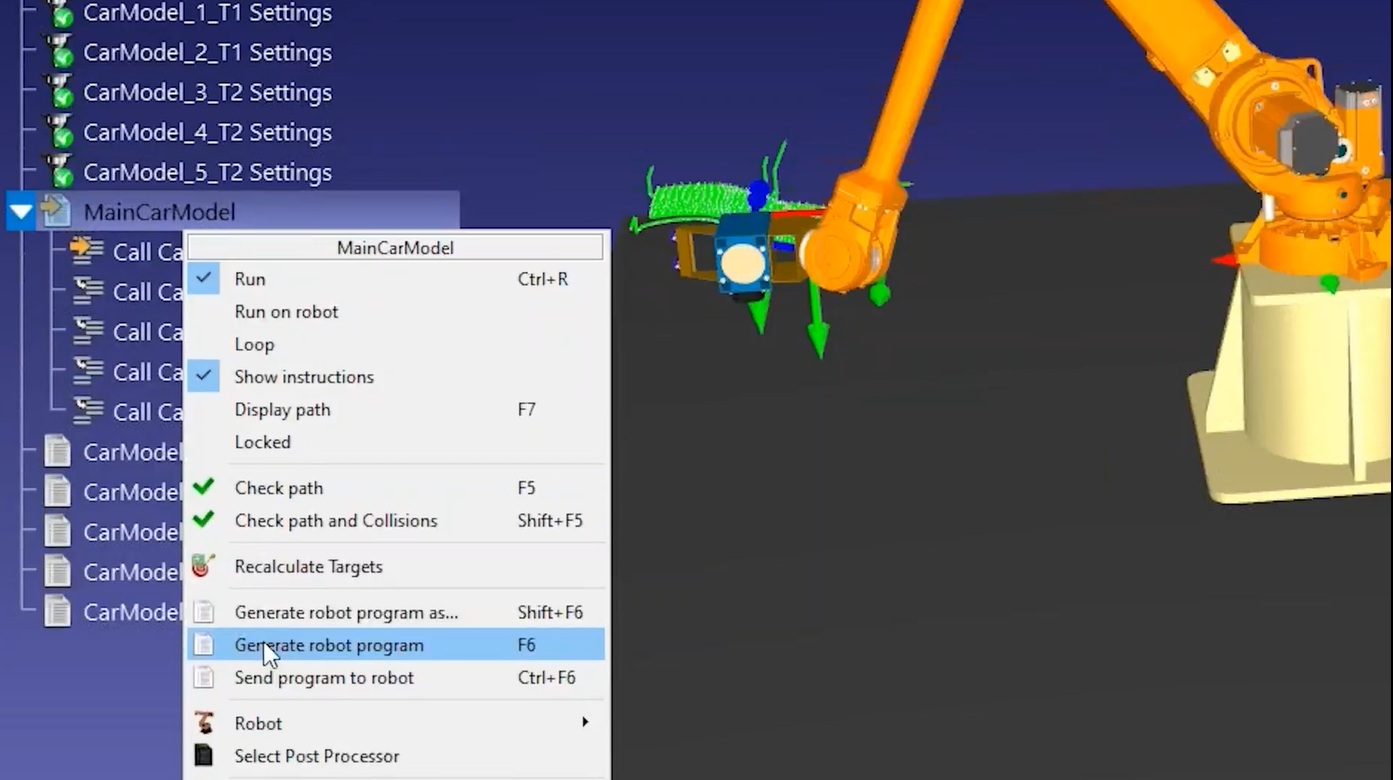
1.各ロボット加工プロジェクトで更新を選択するか、ロボット加工ツールパスを一括選択してプログラムの更新を選択すると、対応するロボットプログラムがRoboDK環境に生成されます。
2.プログラムを一括選択し、Generate robot Programを選択することで、ロボットプログラムを直接生成することができます。
ロボットを選択
このセクションでは、新しいセルを作成する方法を示します。
以下の手順に従って、ロボット加工用の新しいロボットセルを構築することができます。
1.File➔ New Station を選択します。
2.ファイル➔ オンラインライブラリを開く を選択すると、ライブラリにアクセスできます。
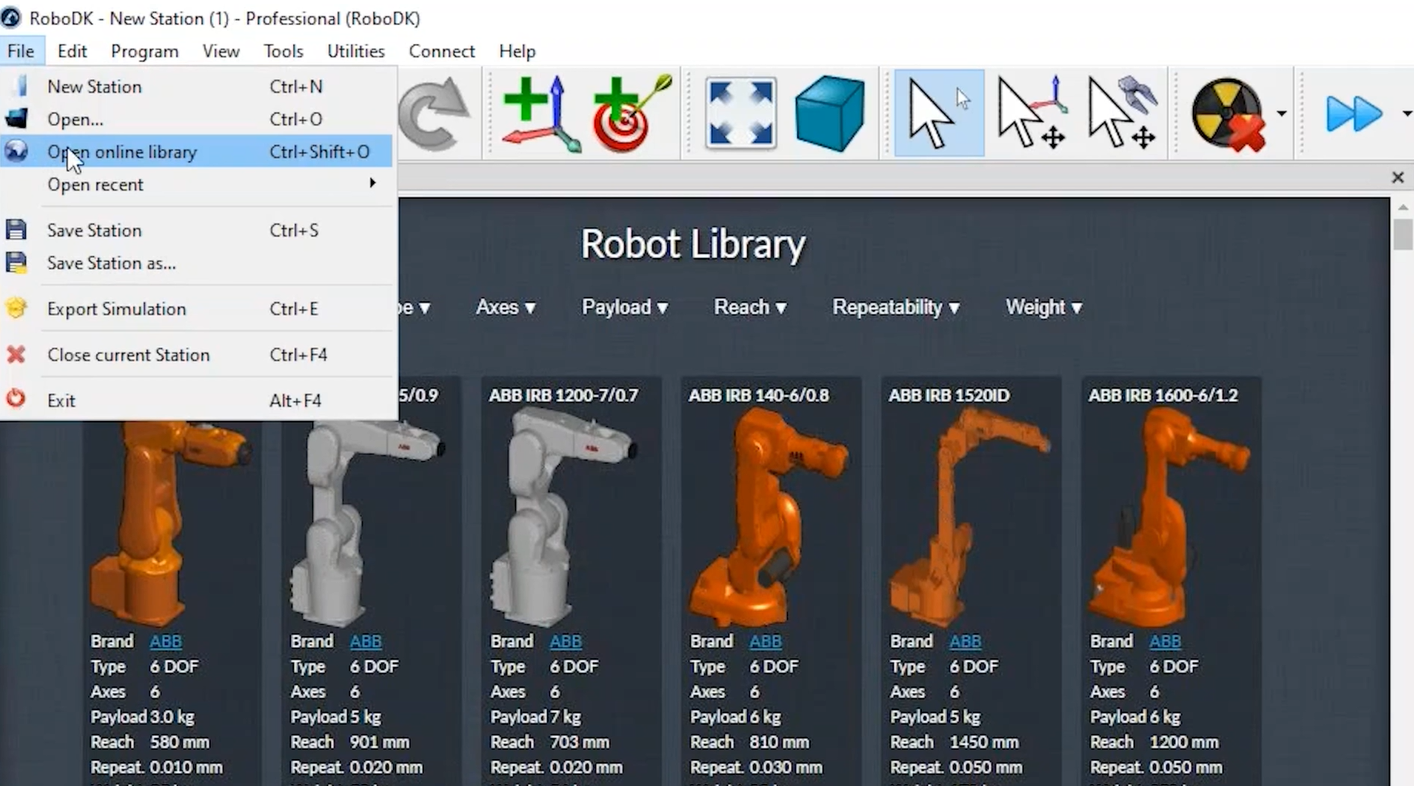
3.ロボットを見つけたら、Downloadを選択してプロジェクトでロボットを開きます。
注:各ロボットには座標系としてロボットベースがロードされます。
ヒント: STEP、IGES、STL などの 3D モデルを読み込むこともできます。新しいファイルを開くには、ファイルを RoboDK にドラッグ&ドロップするか、ファイル➔ 開く を選択してください。RoboDK プロジェクトを作成するためのヒントについては、RoboDK を始めるにあたってをご覧ください。
ヒントロボット加工プロジェクトを作成したら、ロボットを右クリックし、ロボットの置き換えを選択することで、簡単にロボットを置き換えることができます。その後、ライブラリにあるロボットを選択できます。この方法は、セル全体を再構築し、再度リンクを確立するよりも簡単です。
ロボット加工座標系の作成
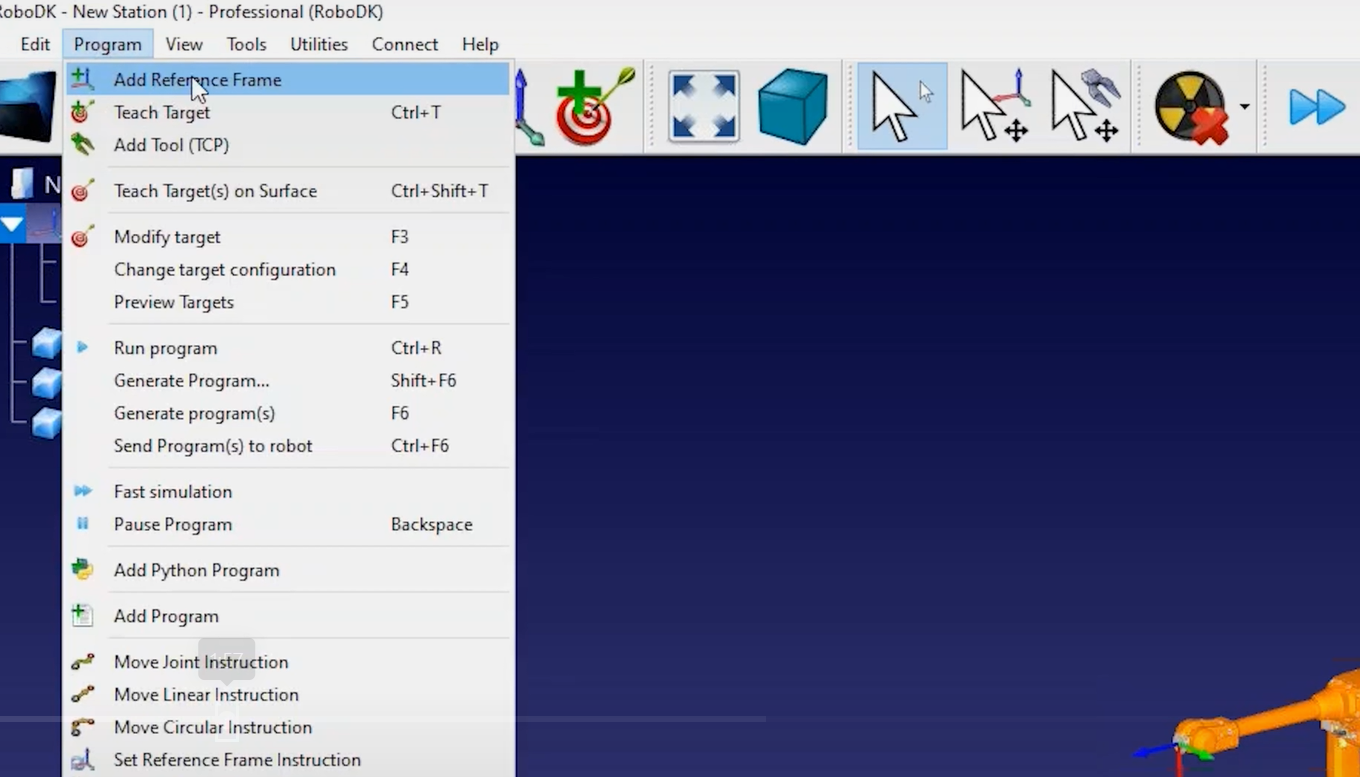
Program(プログラム)メニューからAdd Reference Frame(参照フレームの追加)を選択して、ロボット加工フィクスチャの新しい座標系を作成することができます。
ヒント: ツールバーの対応するボタンを選択して、新しい参照フレームを追加することもできます。
注意:ロードしたオブジェクトをツリー内にドラッグ&ドロップすることで、新しい座標系にアタッチして配置することができます。
ヒント: ツールの 3D モデルを読み込んでおけば、ツリー内のロボットにオブジェクトをドラッグ&ドロップするだけで、RoboDK が自動的にツールに変換します。詳しくはスタートガイドをご覧ください。
ヒント: 必要であれば、ツールをダブルクリックし、さらにオプションを選択してジオメトリを移動できます。
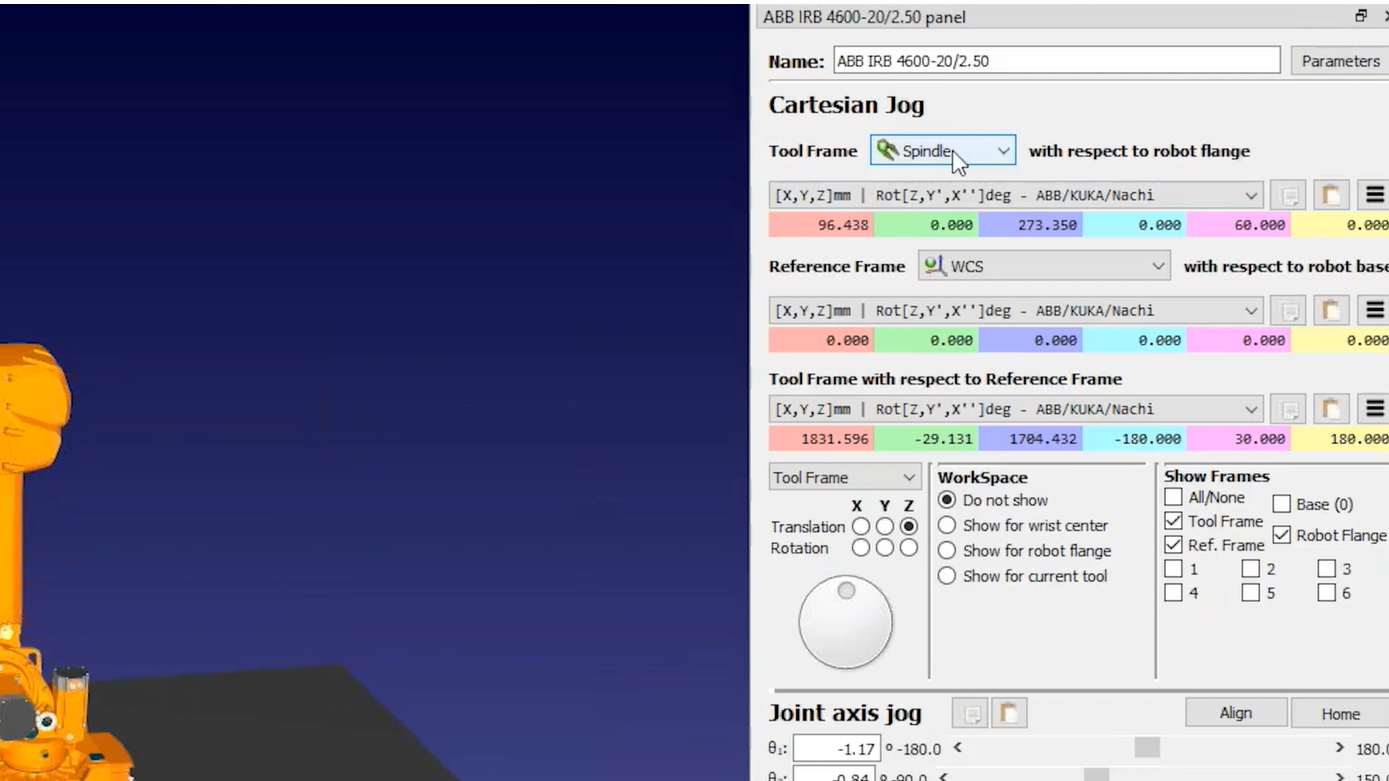
以下の手順に従って、ツール(TCP)を正しく定義してください:
1.ツールの座標があれば、それを入力することができます(ツールのポーズを入力するために、さまざまなベンダー固有の方向フォーマットから選択できます)。
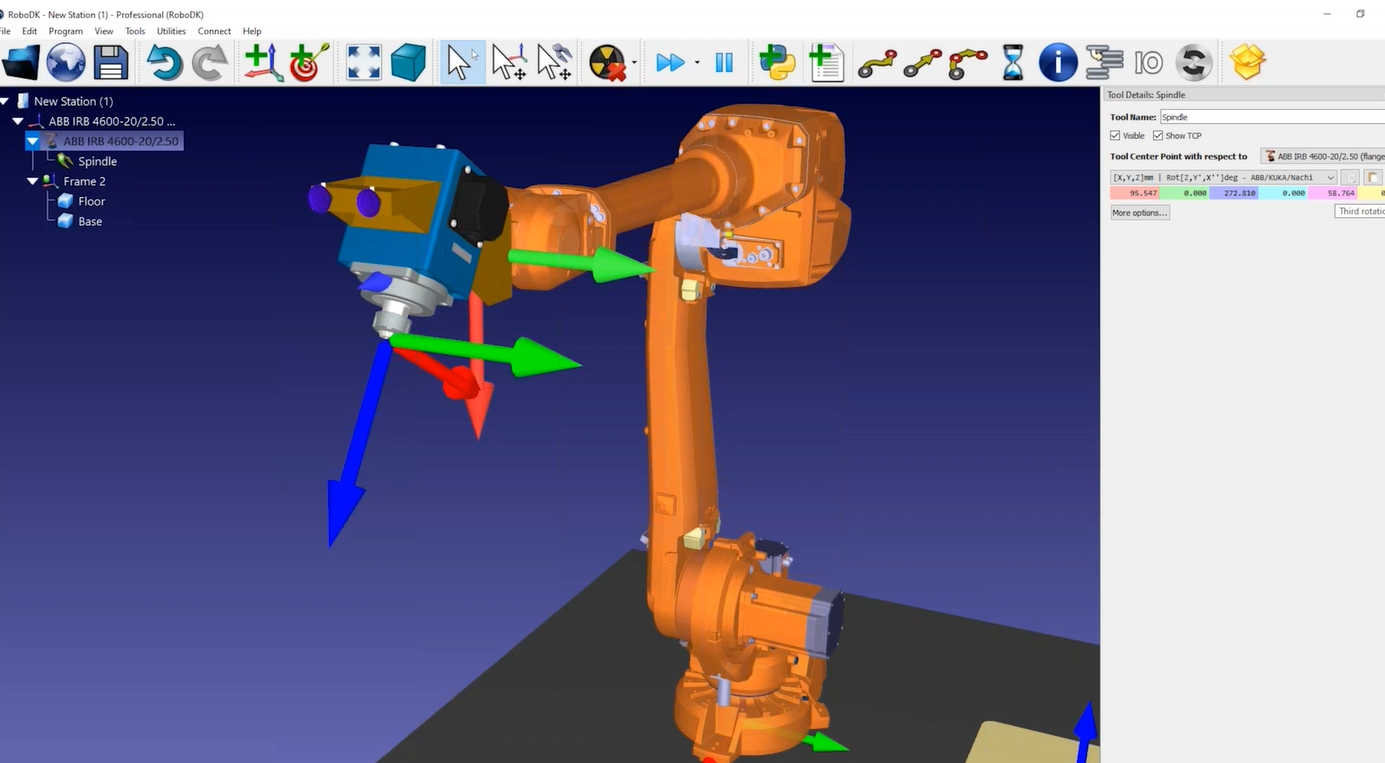
2.ALTキーを押しながら、ロボットや任意の座標系を動かすことができます。
3.ALTキーとShiftキーを押しながら、TCPの位置と向きを変更できます。
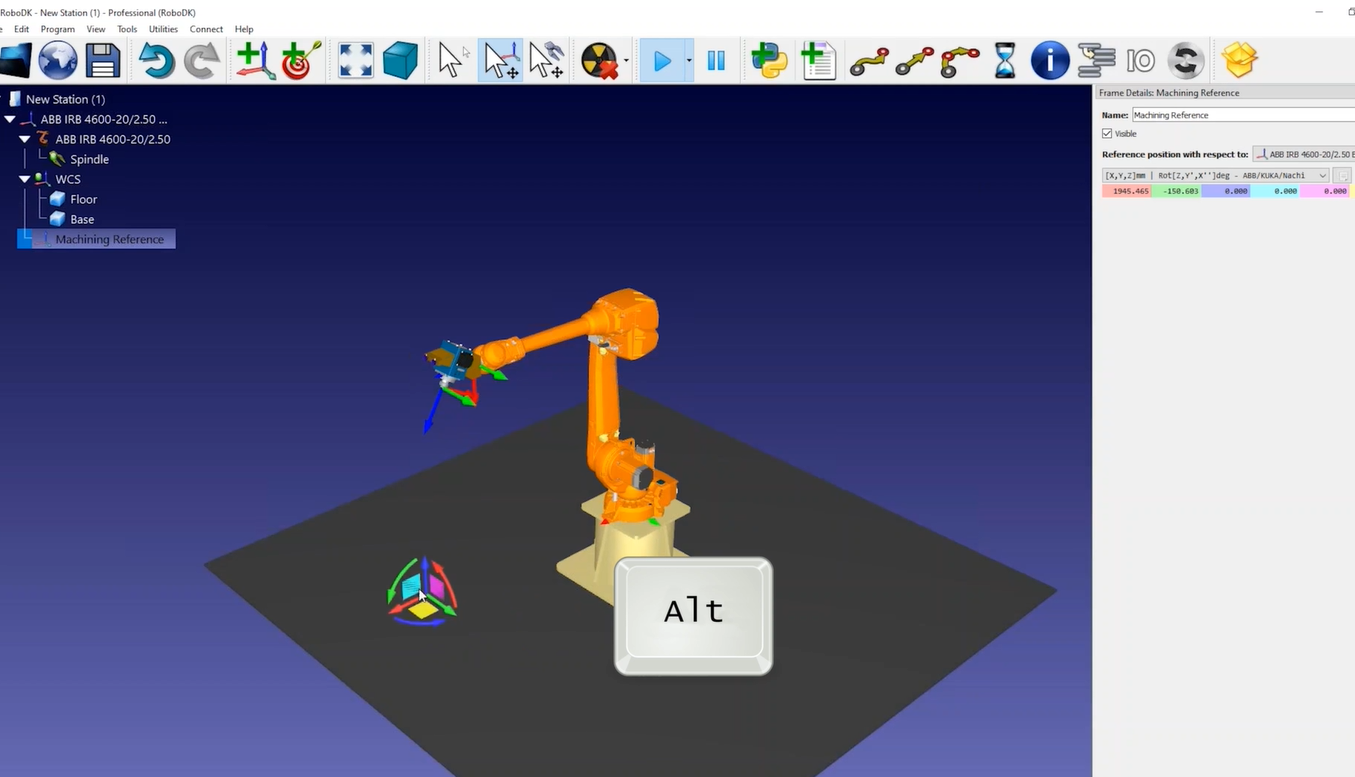
注:座標系についても同様の手順が踏めます。ワールド座標系を表す座標系があれば、それをダブルクリックして座標を0にするか、単に右クリックしてリセットを選択します。
以下の手順に従って、加工参照を表す別の座標系を追加します:
4.Program メニューからAdd Reference Frame を選択します。
5.F2キーを押すか、右クリックして「名前の変更」を選択すると、ツリー内のアイテムの名前を変更できます。
6.パーツを配置する場所を選択する機会があれば、ALTキーを押しながら座標系を好きな場所に移動できます
7.ロボットをダブルクリックすると、使用しているツールと座標系を確認できます。ロボットのある位置について、ロボットパネルに表示される値は、ロボットコントローラに表示される値と同じでなければなりません。
以下の手順に従ってロボットセルを保存してください:
8.ロボットセルを作成したら、File➔ Save Station を選択して1つのRDKファイルとして保存することができます。これで3Dモデルを含むすべての設定が1つのファイルとして保存されます。
9.RoboDKに加工ジョブファイルを読み込むと、RoboDKは自動的に加工ごとに1つのロボット加工プロジェクトを作成します。
10.更新] を選択すると、RoboDK がデフォルトの設定で実行可能なパスを見つけられるかどうかを確認できます。すべての操作を一括して更新することもできます。
11.RoboDKで有効なシミュレーションができたら、プログラムを右クリックしてプログラムの生成を選択します。これでロボットコントローラに必要なファイルが生成されます。
ツールの向きをカスタマイズ
ロボット加工プログラムに沿って、好みの向きをティーチングすることで、ツールの向きを簡単にカスタマイズできます。
この例では、最後の2つの加工で工具の向きを改善することができます:
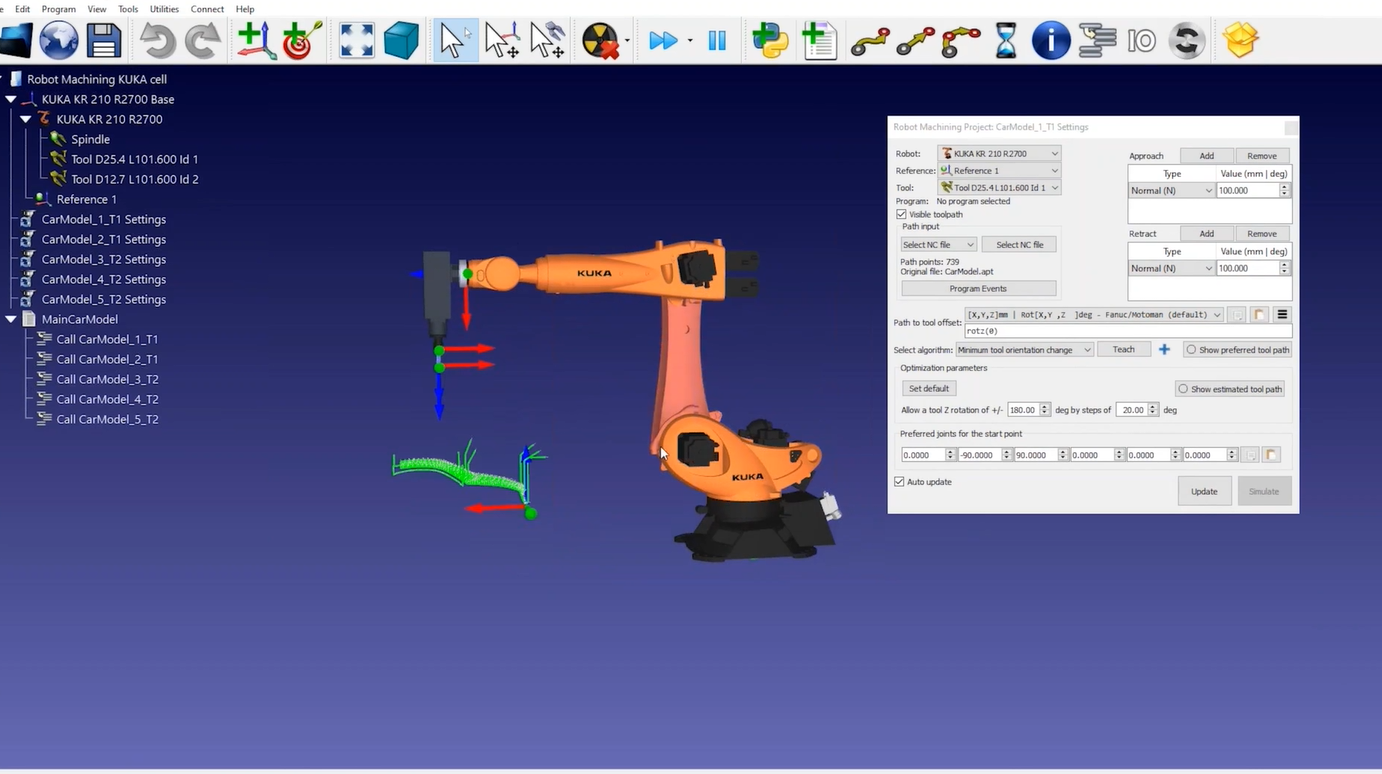
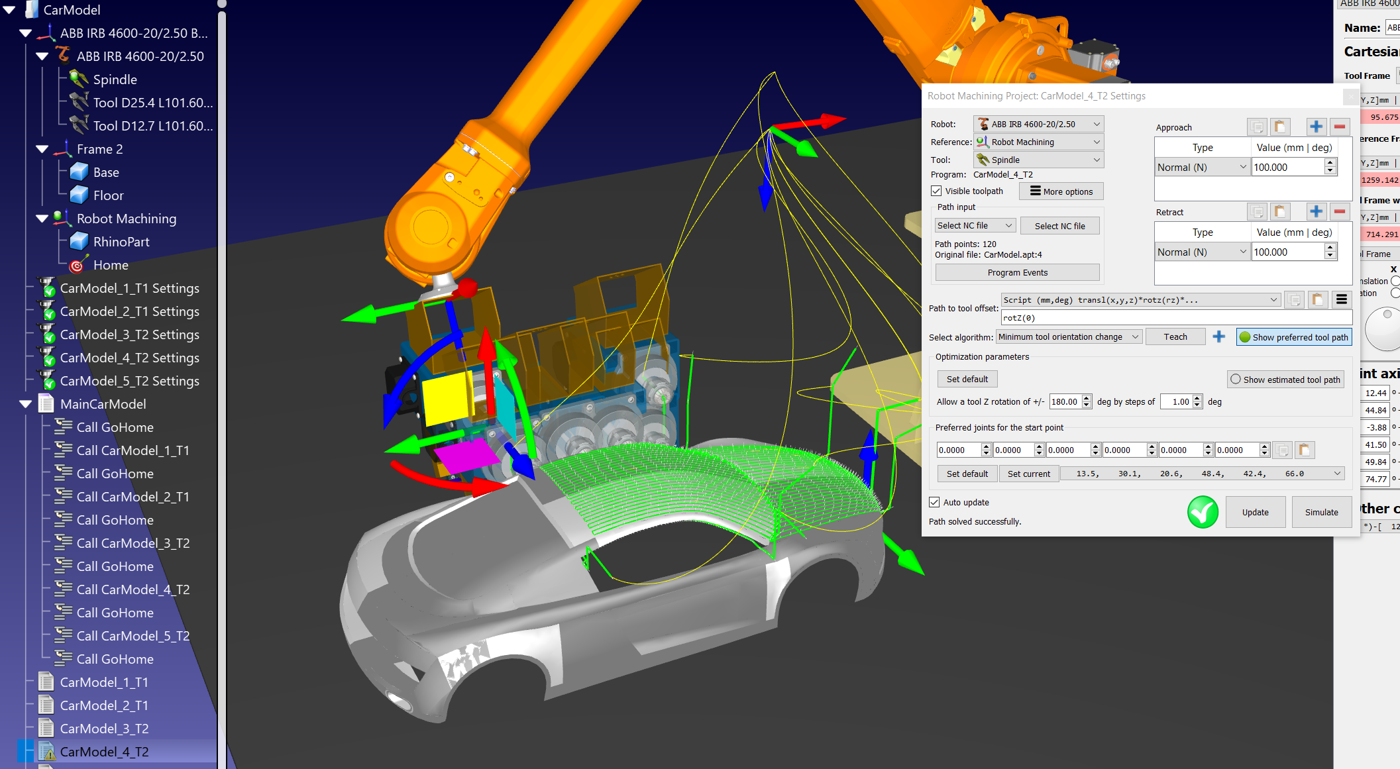
1.ロボット加工設定を開くには、4番目の加工をダブルクリックします。
2.シミュレートを選択するか、対応するプログラムを実行し、加工パスのある点でロボットを停止させます。
3.Show preferred tool path ボタンを選択すると、RoboDKがロボットを追従させようとするツールの向きが表示されます。
4.Altキーを押しながらロボットツールをつかみ、青い丸い矢印をつかんでツールのZ軸を中心に回転させます。ツールの向きを追いかけたい向きに移動します。
5.ロボット加工メニューでティーチを選択すると、パスに沿ってその向きを考慮することができます。Teachを選択することで、RoboDKに現在のツールの向きに従うよう指示し、その向きに合わせて設定が調整されます。
6.Updateを選択してパスを再計算します。
シミュレーションを実行するにはSimulateを選択します(または生成されたプログラムをダブルクリックします)。
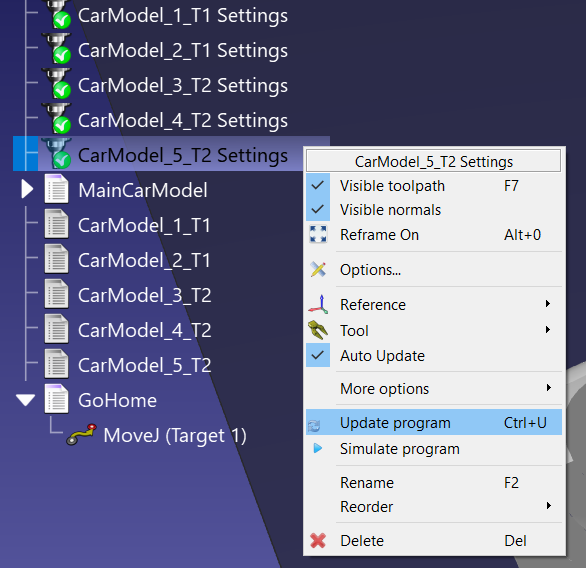
7.期待通りの結果が得られたら、設定をコピーして別のツールパスに貼り付けることができます:ロボット加工設定を右クリックし、コピー設定を選択します。次に、新しいロボット加工設定を右クリックし、設定の貼り付けを選択します。この最後のロボット加工プロジェクトをもう一度右クリックし、プログラムの更新を選択して、このロボット加工ジョブに関連するプログラムを更新します。
ロボット加工ジョブ間の安全な移行
ロボットの加工作業をより安全に移行するために、各加工作業の後にロボットをアプローチポジションに移動させることができます。
以下の手順に従って、GoHomeという新しいプログラムを作成し、加工ジョブの完了後にこの場所に移動します:
1.Program➔ Add-in Program を選択するか、ツールバーの対応するボタンを選択して、新しいプログラムを作成します。
2.F2を押してプログラム名をGoHomeのように変更してください。
3.先ほど作成したプログラムを選択します。
4.ロボットを安全な場所に移動し、Program➔ Move Joint Instruction を選択するか、ツールバーの対応するボタンを選択します。この操作により、その場所に新しいターゲットが作成され、プログラムが以前に選択されていた場合は、そのターゲットに関節移動命令が追加されるはずです。
ヒントターゲットとプログラムの作成方法については、「はじめに」をご覧ください。
5.最初のプログラム呼び出し命令を右クリックし、Add-in 命令➔ プログラム呼び出し命令を選択することで、各加工の間にロボットをこのホームターゲットに移動させることができます。
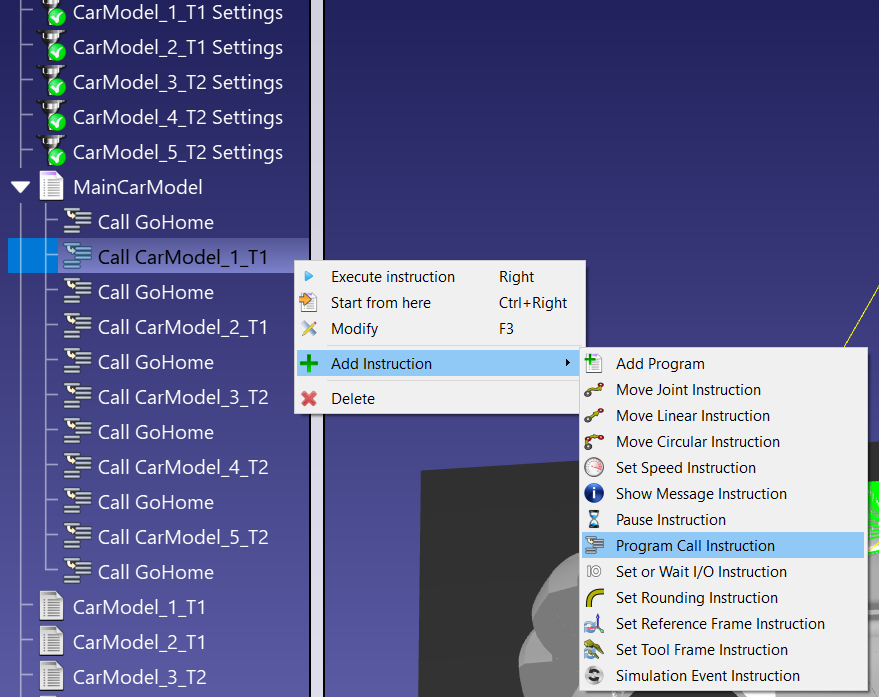
6.移動するプログラム名(GoHome)を入力し、OKを選択します。
ヒント: 命令を追加できない場合は、必ずEscapeを選択してプログラムのシミュレーションを停止してください。
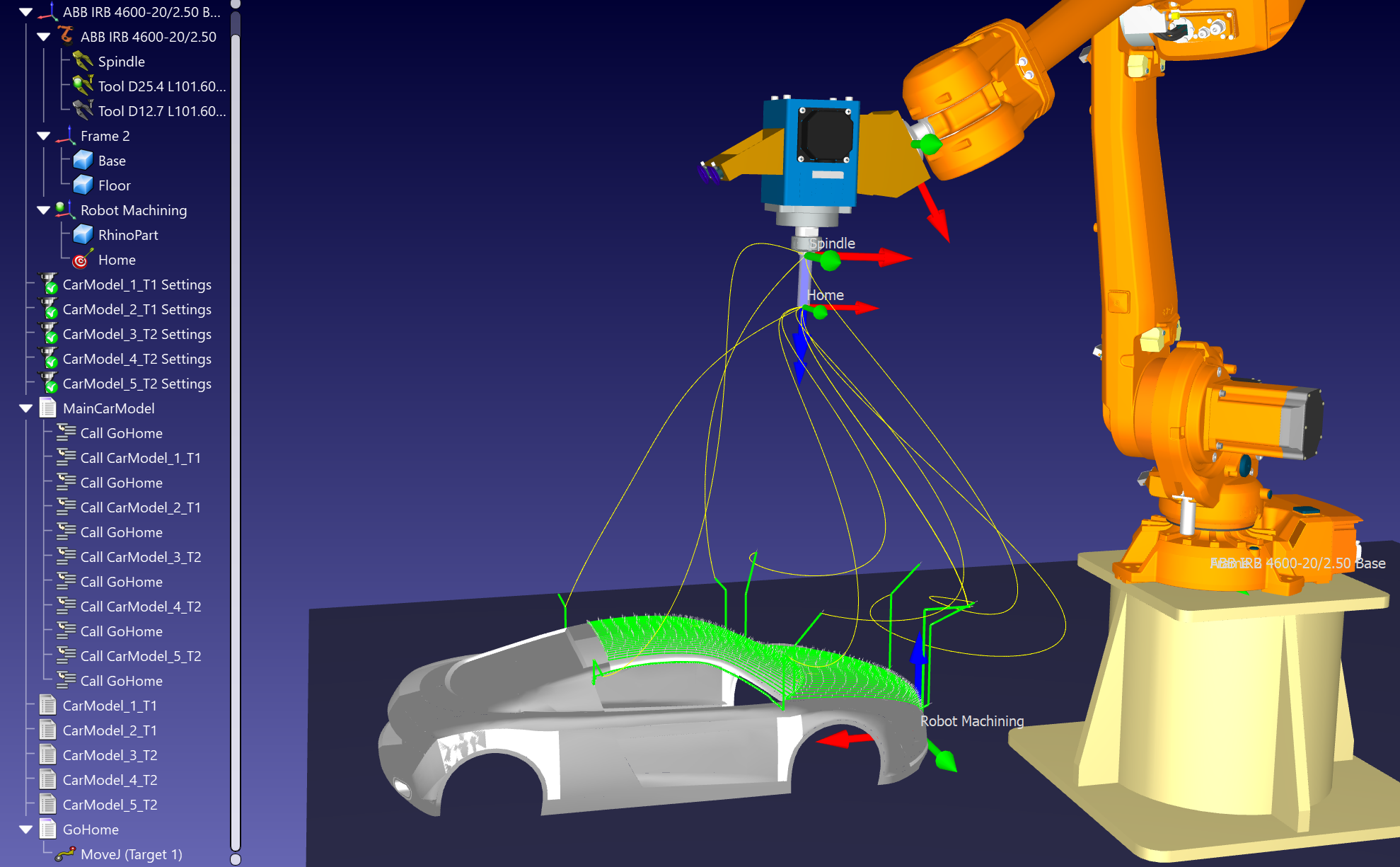
7.この命令をプログラム内でコピー・ペーストすることで、最終的な結果を素早く得ることができます。
8.メインプログラムを右クリックし、パスの表示を選択すると、ロボットのツールパスが黄色い線で表示されます。これにより、アプローチターゲットの位置がプロジェクトに適しているかどうかを視覚化することができます。