RoboDK
次のステップでは、
パスセクションの順番を入れ替えたり、意味を入れ替えたりしたい場合は、以下の手順に従ってください:
1.
2.ステーションの空の部分を右クリックし、選択をリセット
3.パスの出発点に行き、最初のセクションを選択します。右クリックして正しい方向に向いていることを確認し、必要であればSwitch senseを押してください。
4.次のカーブを自動選択]または[すべてを自動選択]を選択すると、パスのすべてのセクションが正しい順序で自動的に選択されます。
5.完了を選択します。これでRoboDKの設定画面に戻ります。
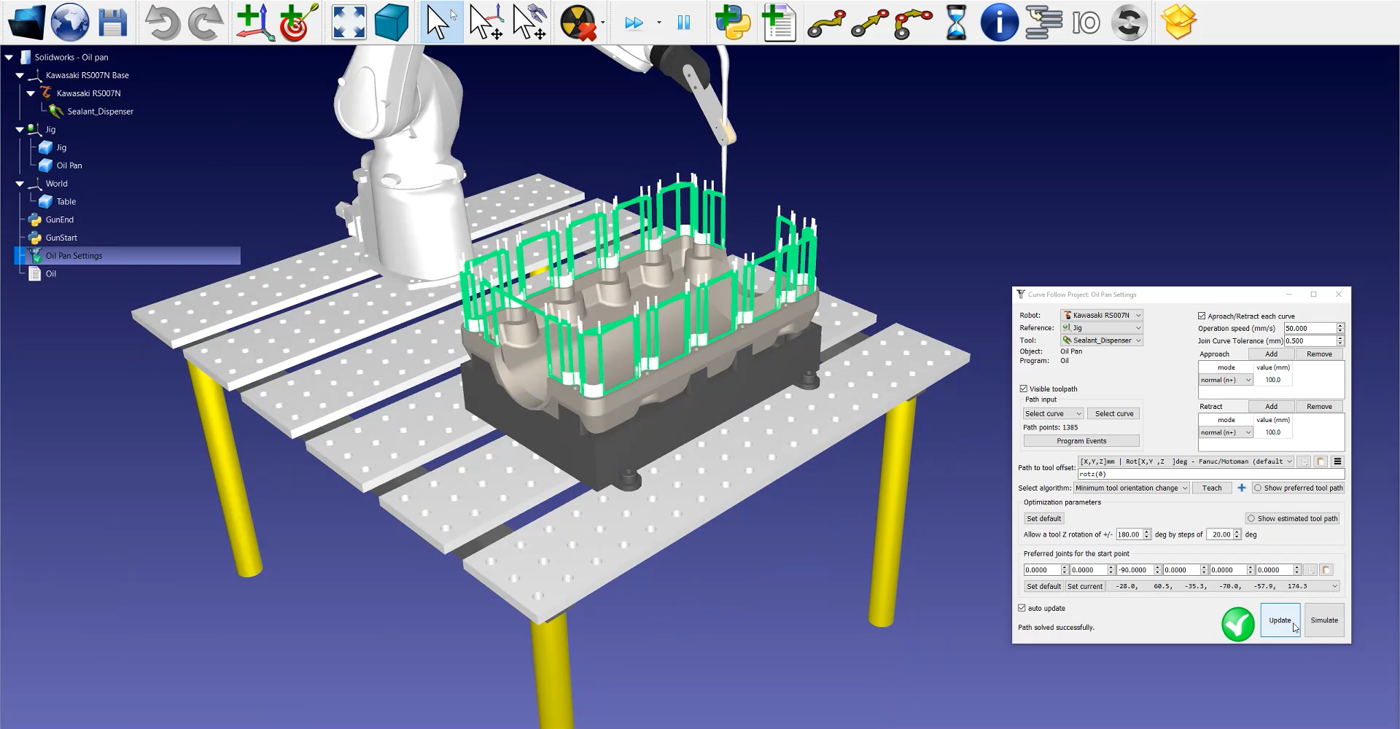
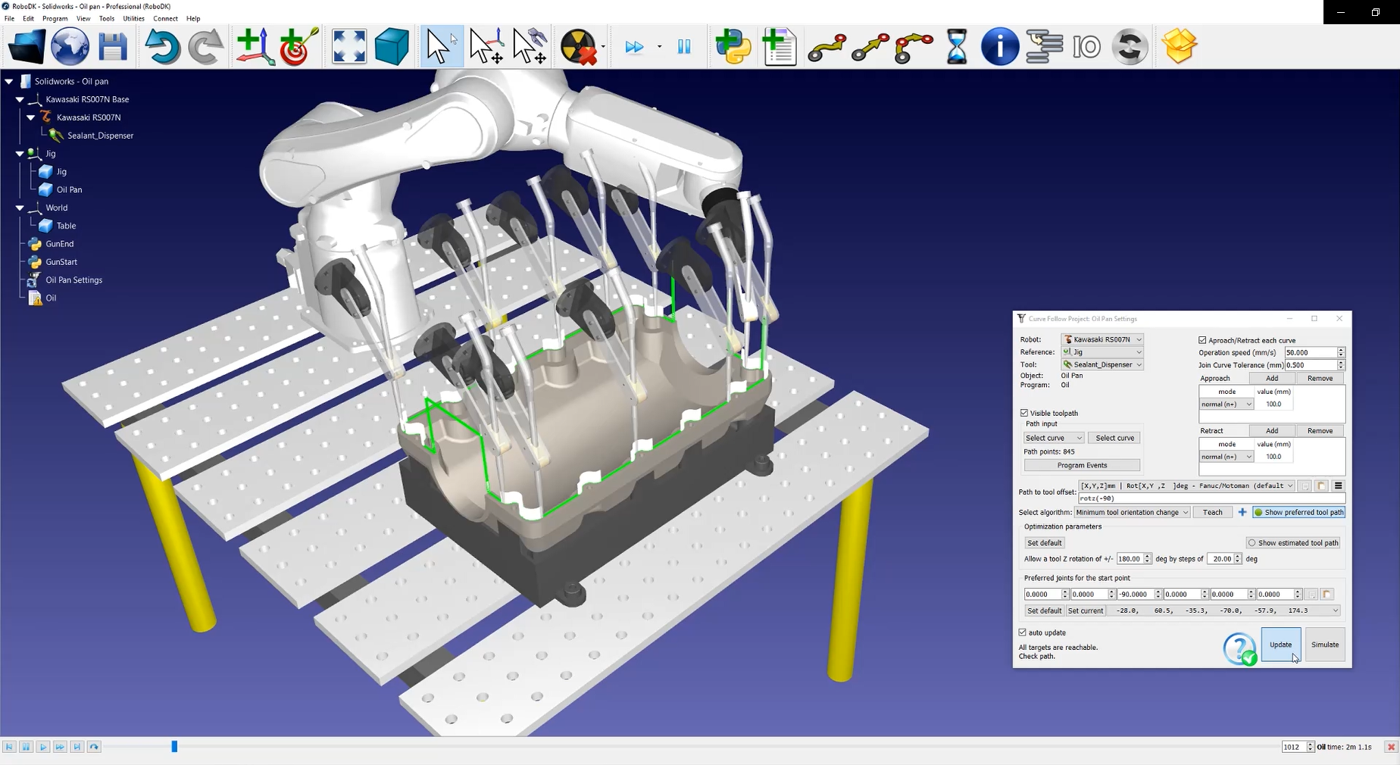
次に、ツールの向きを調整する必要があります:
1.Show preferred tool path(優先ツールパスを表示)を選択すると、下図のようにパスに沿ってツールを視覚化することができます。
2.rotzの値を変更します。この例では-90度が設定されています。
3.Update➔ Simulate を選択します。
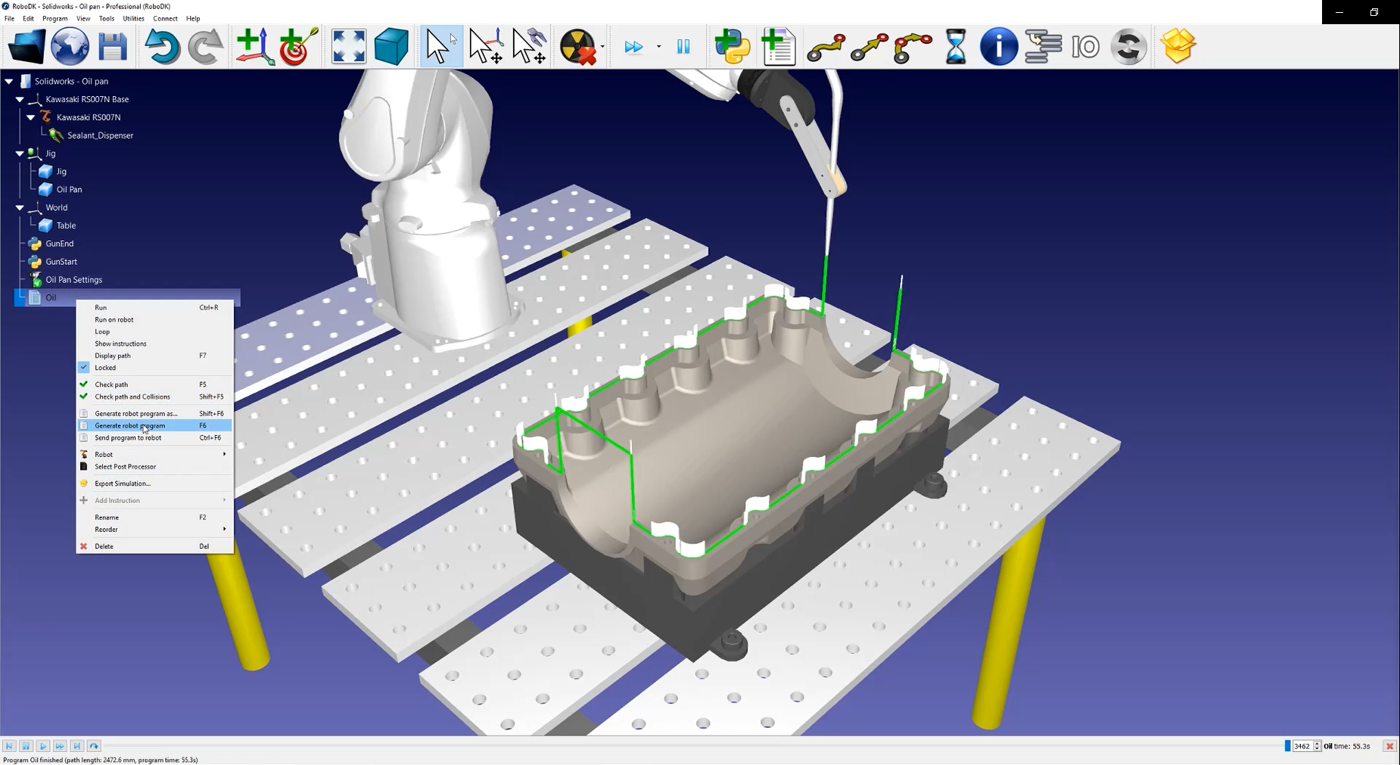
ロボットプログラムを生成するには、
これで.pgファイルをロボットコントローラに転送する準備ができました。