Dispensing
イントロダクション
このセクションでは、ロボットのシミュレーションとオフラインプログラミングのための基本的なプロジェクトをRoboDKで作成する方法を説明します。この例では、カワサキRS007Nロボットをシミュレーションし、SolidWorksとRoboDKを使って液体吐出ロボット用にプログラミングします。SolidWorksの2Dスケッチを15分以内に実際のロボットプログラムに変換する方法を学びます。
ビデオSolidWorksによる液体吐出アプリケーションのロボットプログラミングhttps://www.youtube.com/watch?v=IkiwigxWP
SolidWorks用RoboDKプラグインを使えば、SolidWorksで作成した3DモデルをRoboDKに簡単に読み込むことができます。このプラグインを使用すると、SolidWorksから50以上の異なるロボットメーカー、500以上のロボットを直接プログラムすることができます。
SolidWorks用RoboDKプラグインはSolidWorks 2016以降に対応しており、無料でご利用いただけます。ただし、RoboDKの一部のオプションはライセンスの購入が必要です。
ヒントSolidWorks用RoboDKアドインについては、SolidWorks用RoboDKアドインのセクションをご覧ください。
液体ディスペンサーの例
プロジェクトを開始するには、まずRoboDKの液体吐出サンプルをデフォルトライブラリから選択する必要があります。
セットアップ
この例では、カワサキRS007Nロボット、ディスペンスツール、部品、オイルパン、部品を固定する治具を使用しています。
ヒント この、RoboDKでロボットステーションを作成する方法を順を追って学んでください。
ステーションをロードします:
1.File ➔
2.RoboDKのサンプルセクションから液体分注のサンプルを探します:
C:/RoboDK/Examples/Plugin-SolidWorks-Liquid-Dispensing.rdk.
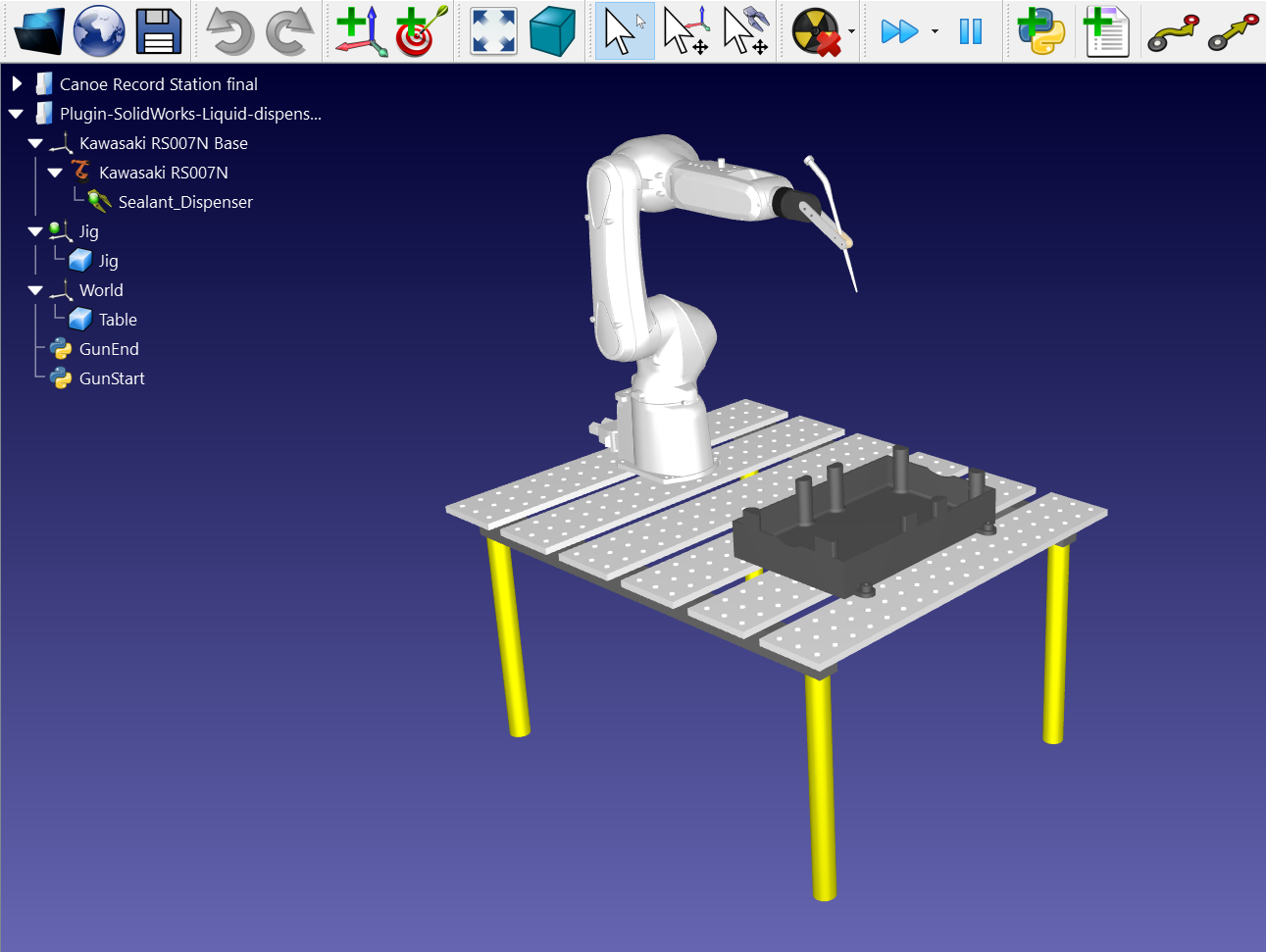
ステーションをロードしたら、SolidWorksを開きます。
SolidWorksからの2Dスケッチ
SolidWorksで3Dオブジェクトを開きます。この例では、3Dオブジェクトはオイルパンで、その上に溝を埋める必要があります。
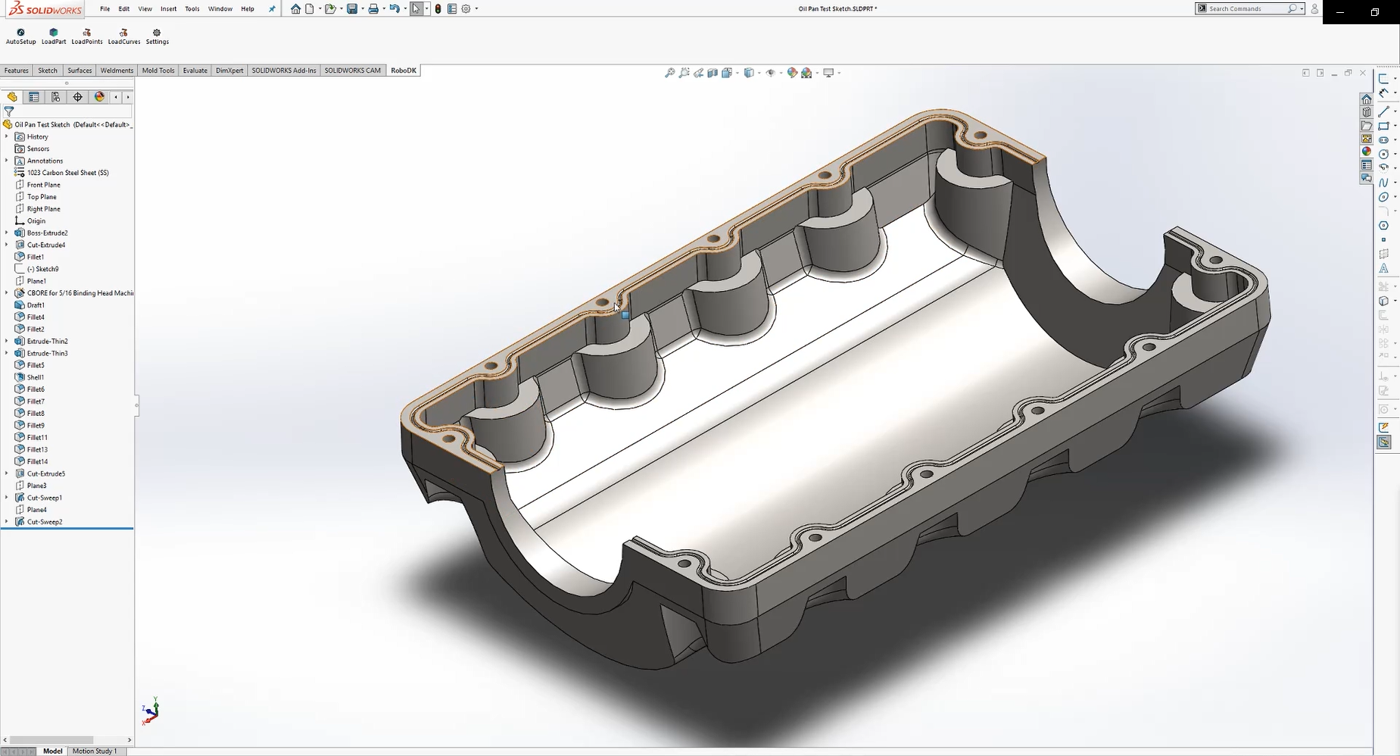
このプロジェクトの目標は、シーラントを左右に付けずに、上面レベルの溝の中央に吐出することです。こうすることで、シーラントがスムーズに流れるようになります。
ここで2Dスケッチを使用します。平面の上に新しいスケッチを作成することから始めなければなりません:
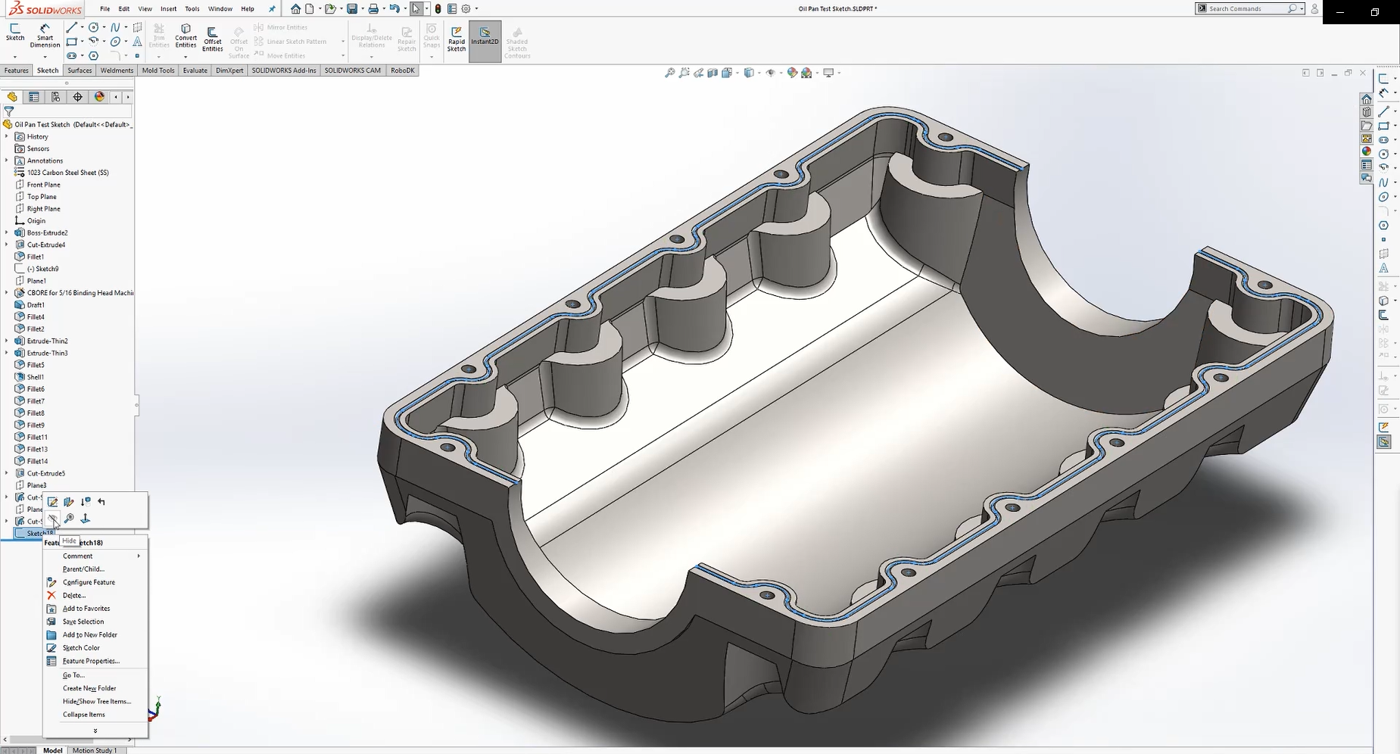
1.Sketchタブを選択し、Sketchボタンを押して作成します。
2.3Dオブジェクトのエッジの1つを選択します。
3.その上で右クリックし、Select Tangencyを押すと、溝のエッジ全体が自動的に選択されます。
4.Offset Entities ボタンを選択し、溝の半分の幅を入力します。この場合、値は1.5mmです。
ロボットのツールパスが完成します。オイルパンの反対側も同じようにやり直します。RoboDKのプラグインで選択できるように、下の画像のようにスケッチが表示されていることを確認してください。
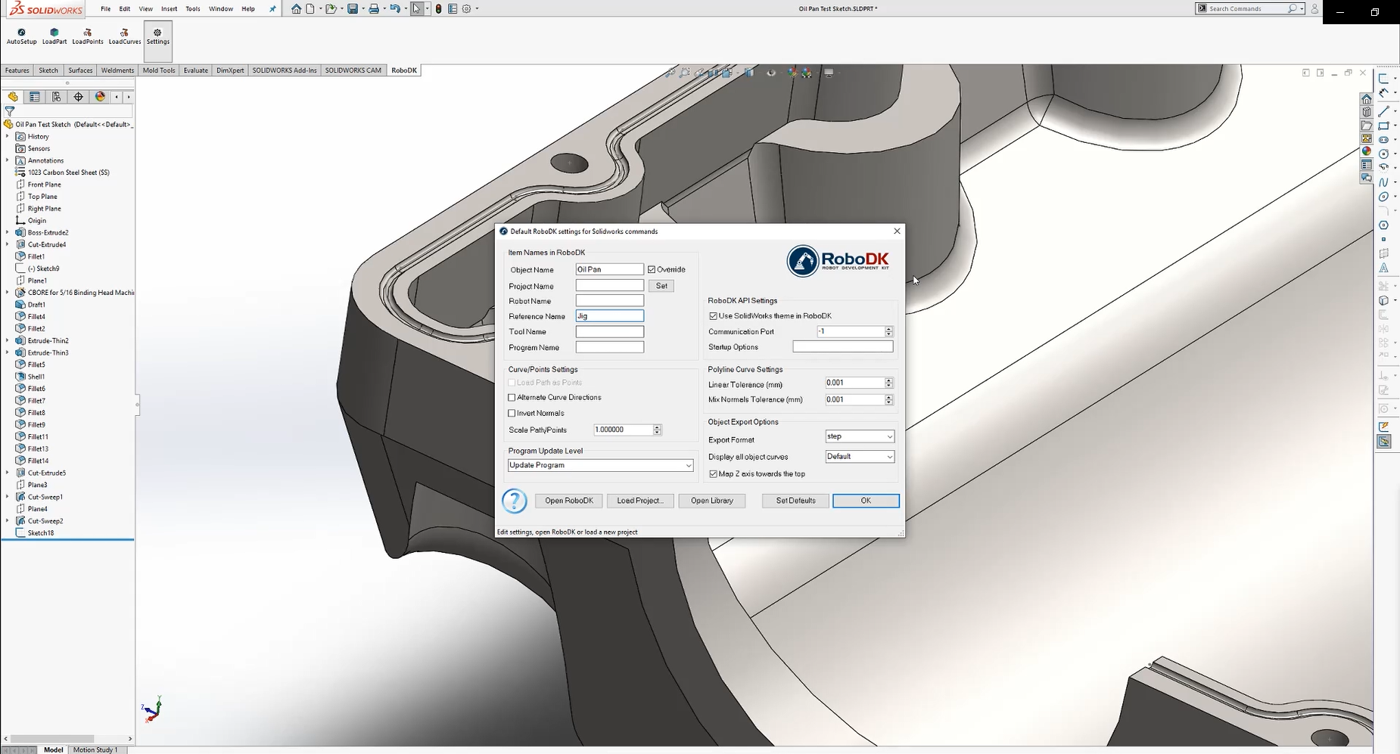
次の手順に従ってスケッチをRoboDKに読み込みます:
1.RoboDKタブを選択し、
2.RoboDKのオブジェクト名を入力します。この例ではオイルパンです。
3.エクスポートするリファレンス名を入力します。この例ではJigです。
4.設定]ウィンドウを閉じるか、[OK]を選択します。
5.SolidWorks の
6.スケッチのすべての線と上面を選択し、OKを押します。
7.
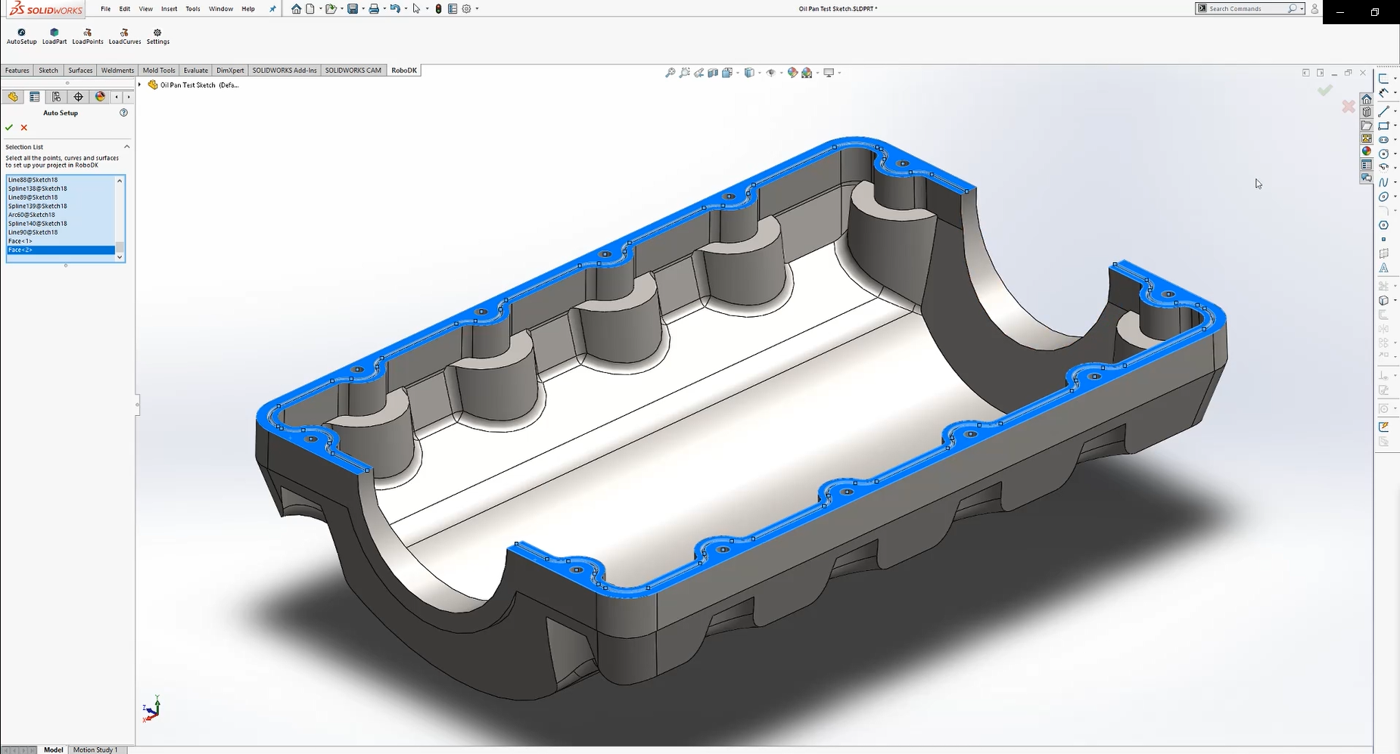
アクティブな参照フレーム(Jig)にパーツがロードされ、RoboDKにツールパスに沿った新しいカーブフォロープロジェクトが表示されるはずです。
RoboDKステーション
次のステップでは、
パスセクションの順番を入れ替えたり、意味を入れ替えたりしたい場合は、以下の手順に従ってください:
1.
2.ステーションの空の部分を右クリックし、選択をリセット
3.パスの出発点に行き、最初のセクションを選択します。右クリックして正しい方向に向いていることを確認し、必要であればSwitch senseを押してください。
4.次のカーブを自動選択]または[すべてを自動選択]を選択すると、パスのすべてのセクションが正しい順序で自動的に選択されます。
5.完了を選択します。これでRoboDKの設定画面に戻ります。
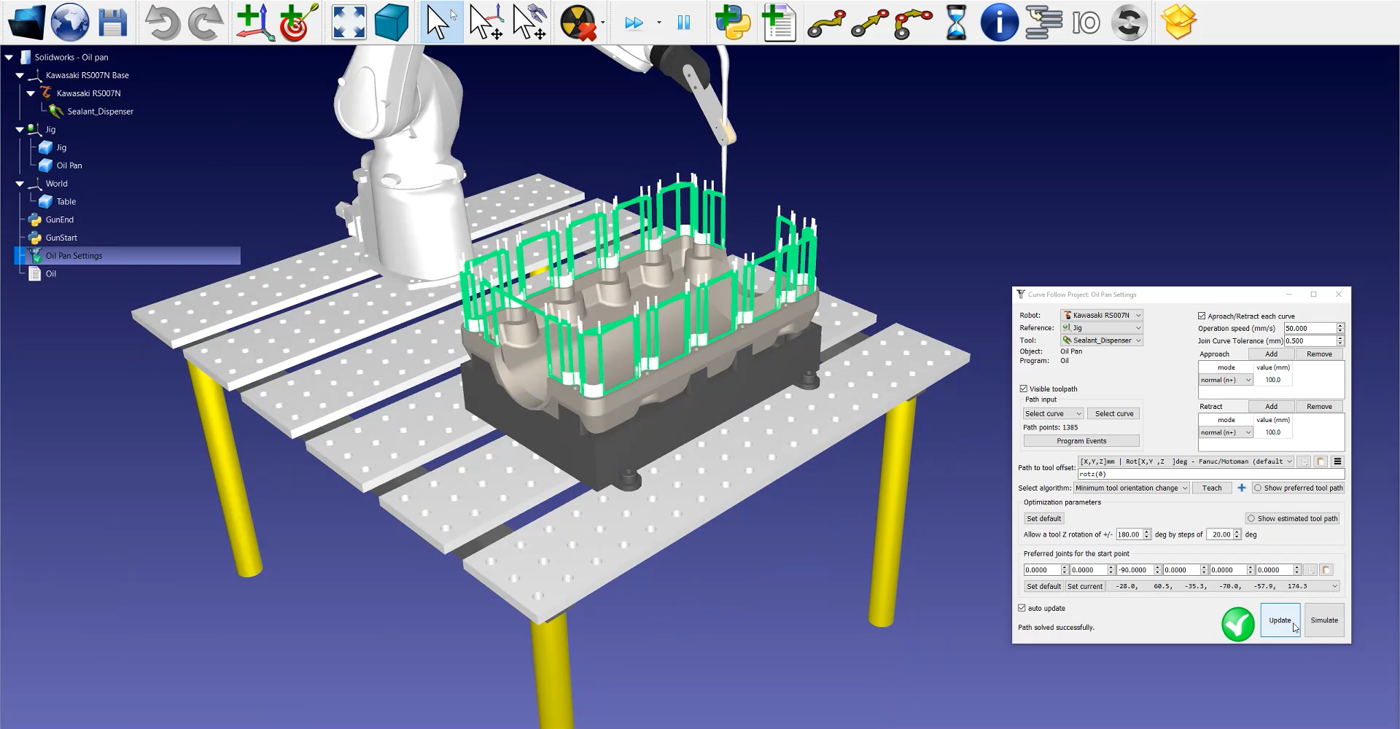
次に、ツールの向きを調整する必要があります:
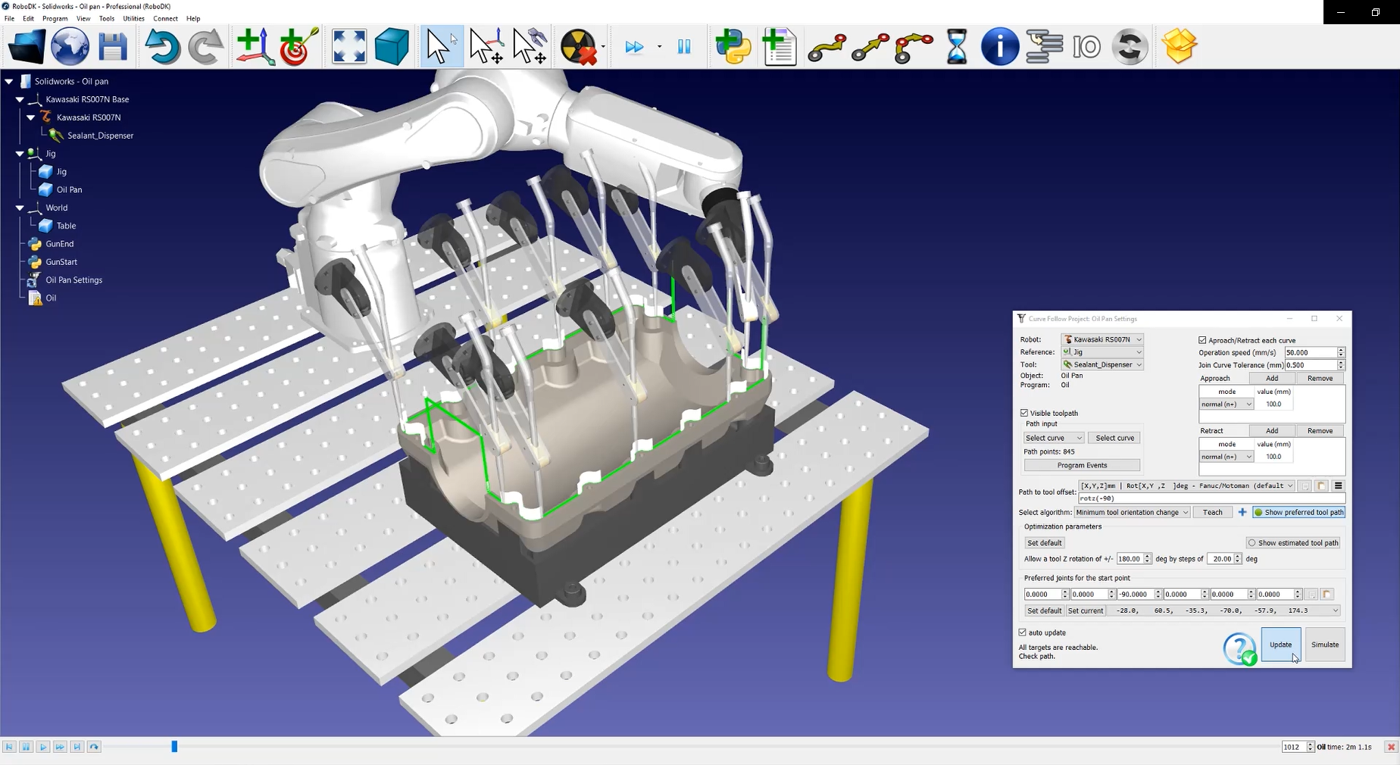
1.Show preferred tool path(優先ツールパスを表示)を選択すると、下図のようにパスに沿ってツールを視覚化することができます。
2.rotzの値を変更します。この例では-90度が設定されています。
3.Update➔ Simulate を選択します。
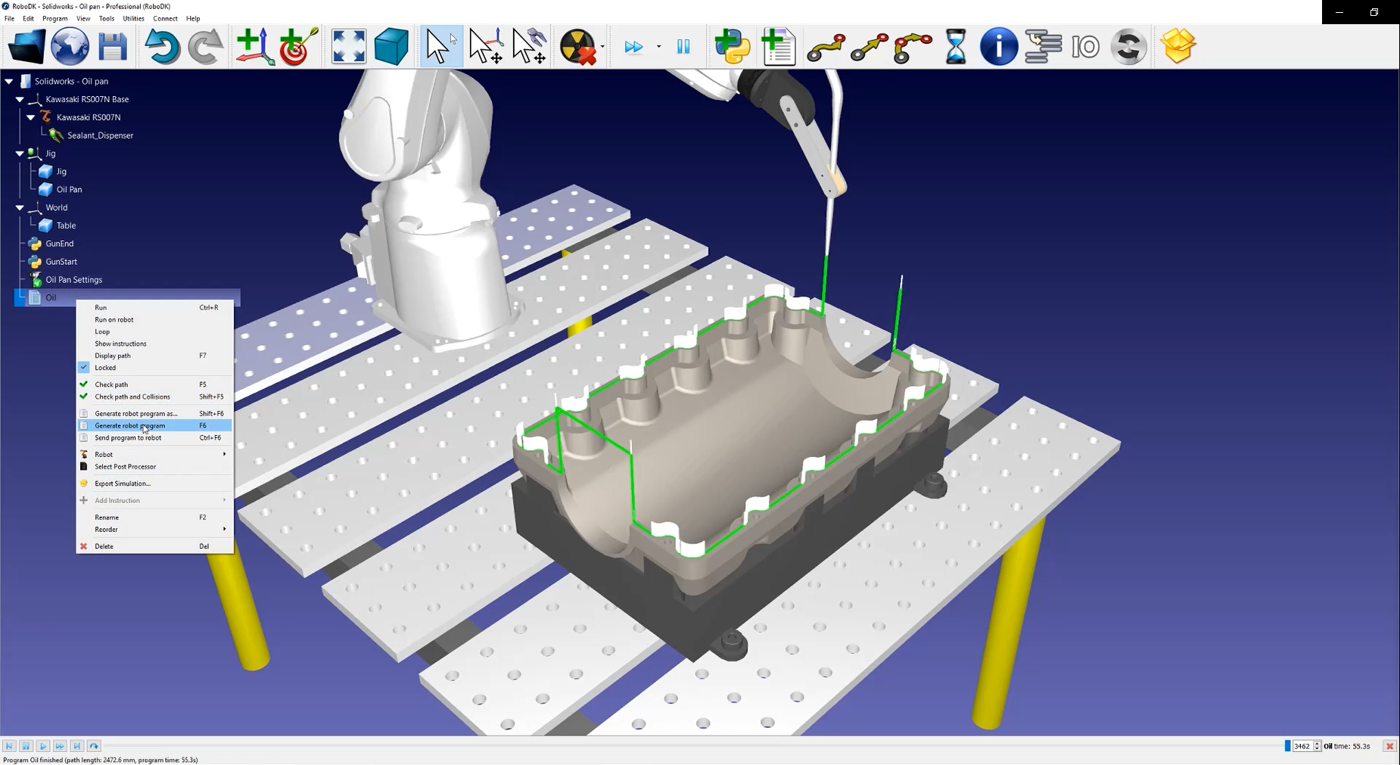
ロボットプログラムを生成するには、
これで.pgファイルをロボットコントローラに転送する準備ができました。