方法
Fusion 360で3Dオブジェクトを開きます。この例では、3Dオブジェクトはプレスされた金属片です
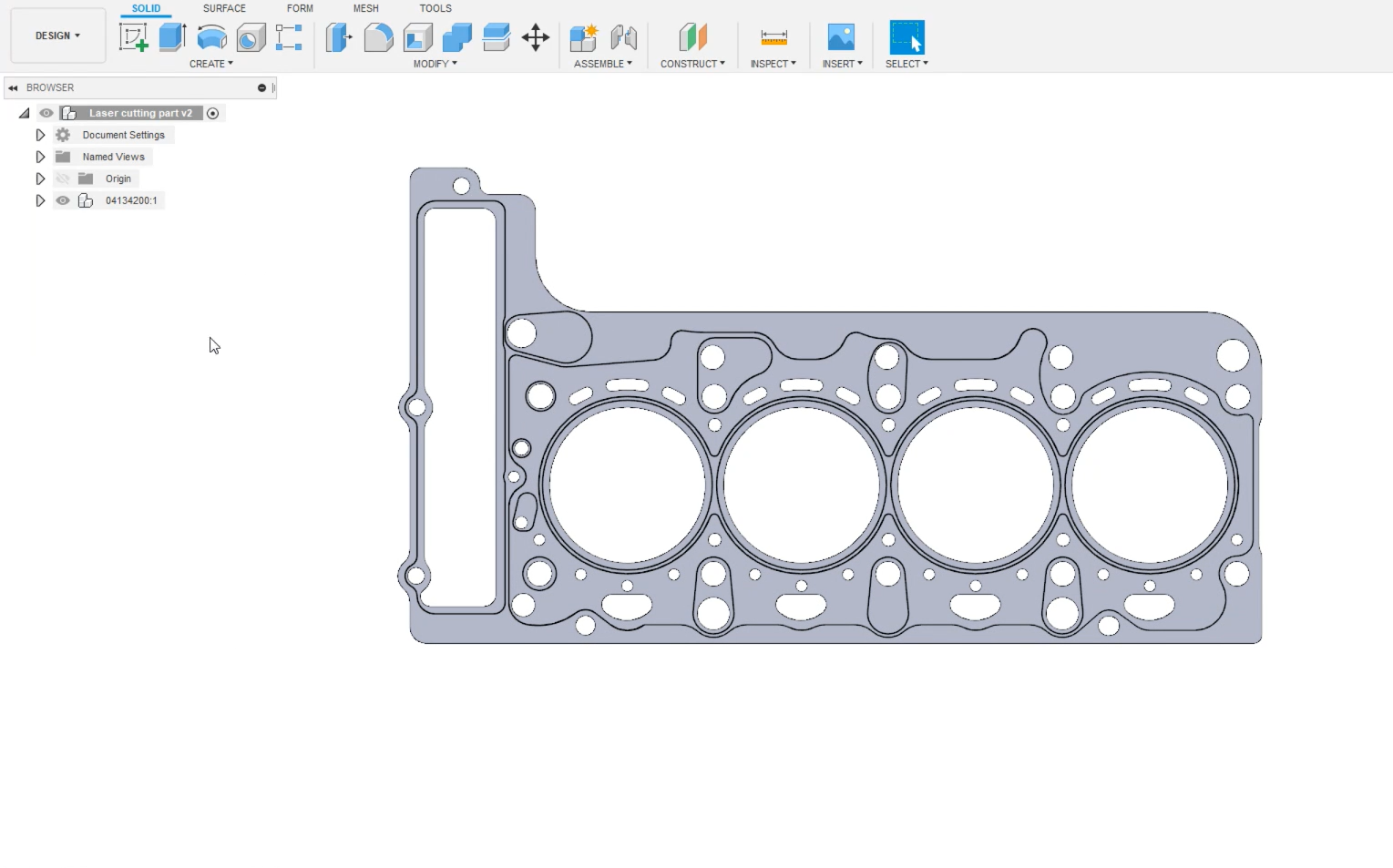
このプロジェクトの目標は、すべての穴をリーサーカッターで切断するロボットプログラムを自動的に作成することです。手作業でプログラミングするには時間がかかりすぎます。
1.左上にあるFusionのDesignセクションを選択します。
2.ツールタブを選択します。ここにRoboDKプラグインがあります。
3.
パーツは RoboDK ステーションのアクティブな参照フレームでインポートされています。パーツが正しい向きでインポートされていることを確認してください。この例では、パーツの向きを修正する必要があります。
注意:パーツの向きは、Fusion 360で設計されたパーツの向きによって定義されます。

次の手順に従って、部品の向きを変更してください:
1.
2.開いたメニューの「その他のオプション」をクリックします。
3.ジオメトリの移動(Move geometry)に進み、上の画像のようにX軸(水色)に90を入力します。
4.Apply Moveをクリックして向きを保存します。
Fusion360のRoboDKプラグインには、カッティングパスをRoboDKにインポートするためのもう一つの機能があります。
1.Fusion 360に戻ります。
2.RoboDK プラグインのメニューからLoad Curve(s) を選択します。
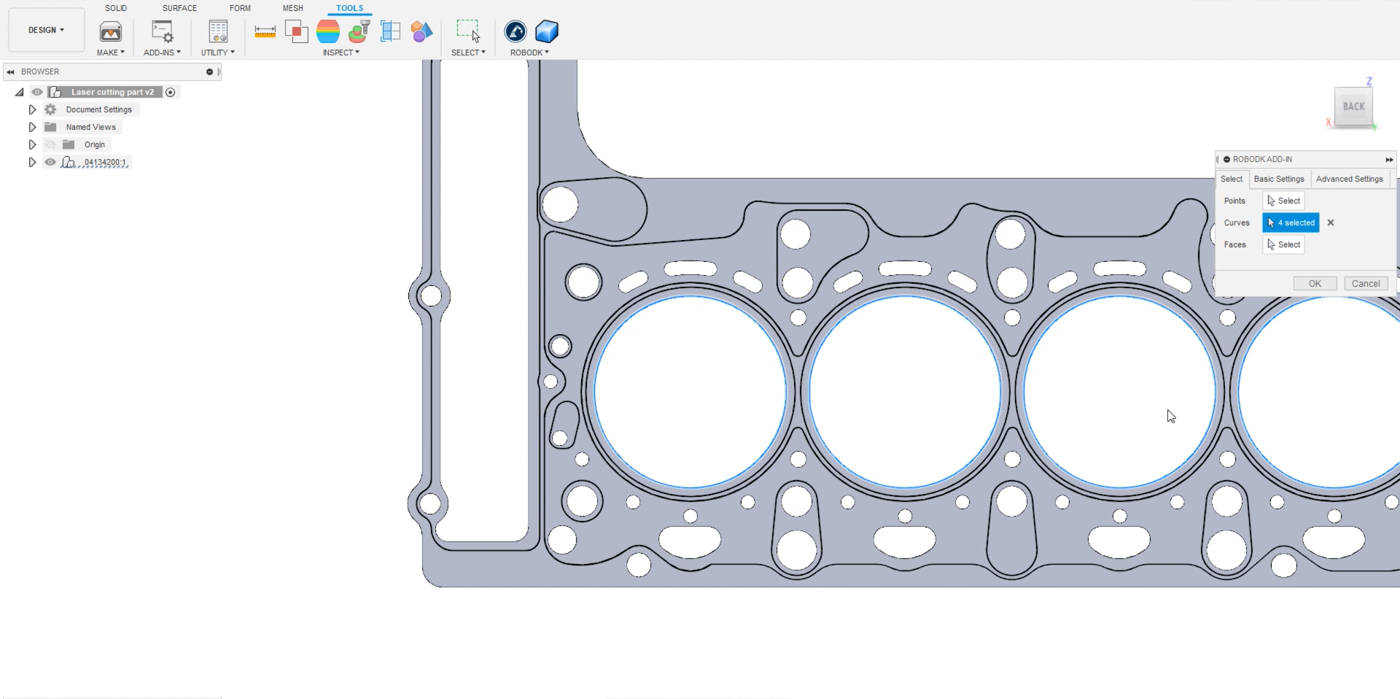
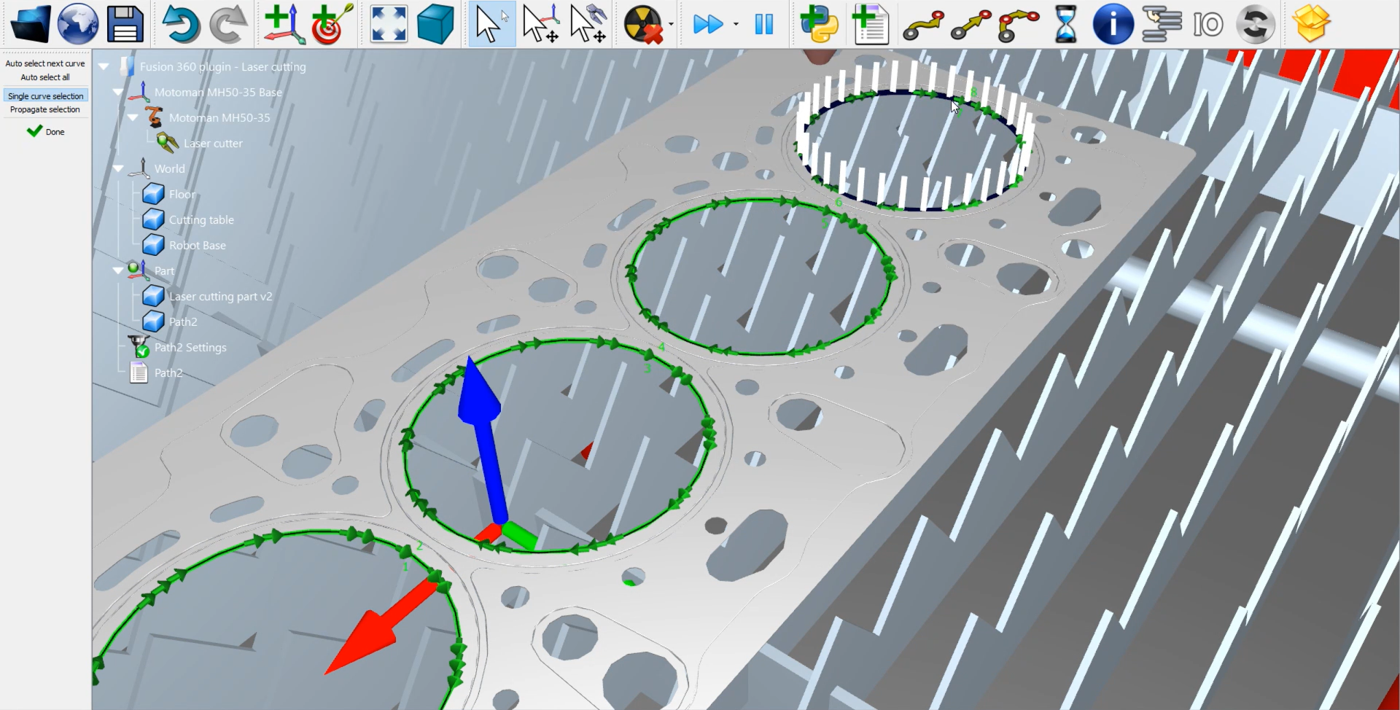
3.開いたメニューからカーブを選択します。
4.下図のように、4つの大きな円の端を選択します。
ここでRoboDKにロボットツールの向きを指定する必要があります。
1.開いたメニューから「顔」を選択します。
2.下図のように、ツールを法線にしたい面を選択します。
これで設定を行うことができます:
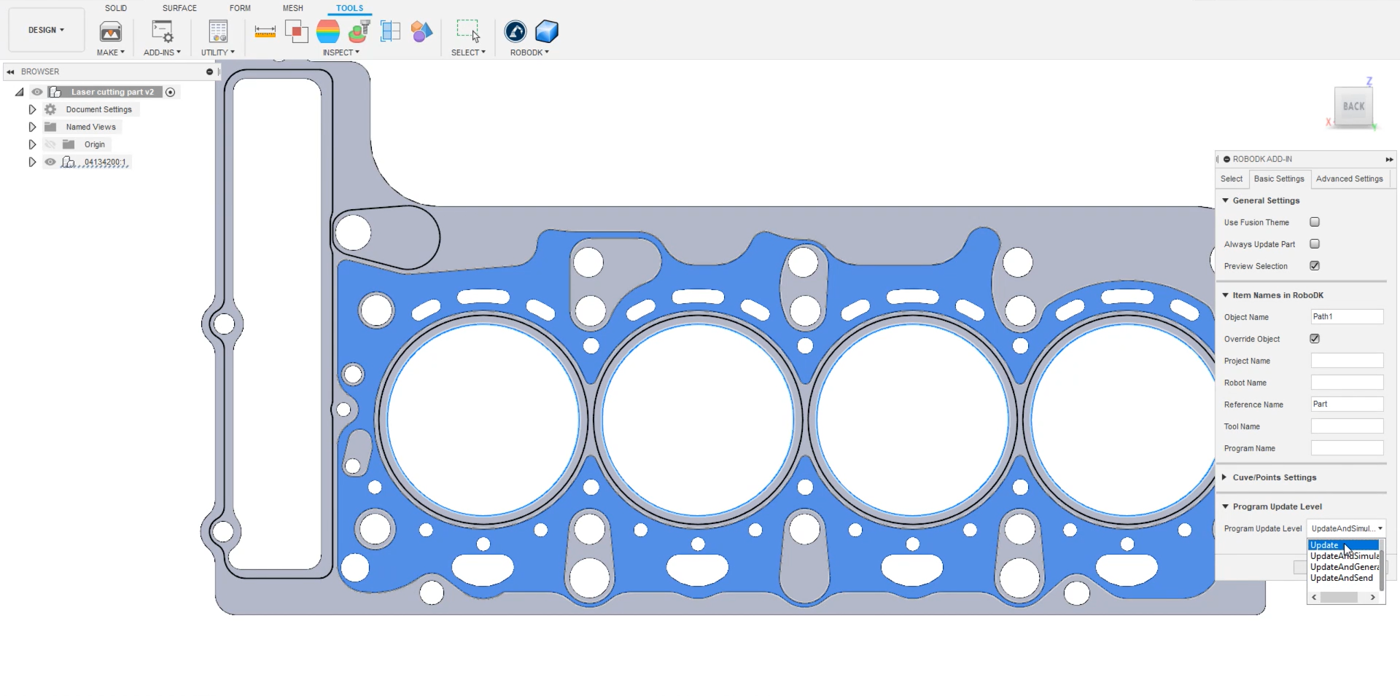
1.同じメニューの「基本設定」に進みます。
2.RoboDKをデフォルトの動作のままにしておきたい場合は、[フュージョンテーマを使う]のチェックを外してください。
3.パスに名前を付けるためにオブジェクト名を入力します。この例ではPath 1 となります。
4.エクスポートしたいReference Nameを入力します。この例ではRoboDKステーションと同じPartという名前になっています。
5.プログラム・アップデート・レベルで「アップデート」を選択すると、上の画像に示すようなオプションが追加されます。これはオプションです。
6.OKをクリックしてください。
注意: 詳細設定タブには、RoboDK に送信するポイント数を制御するリニアトレランスがあります。この数値が小さいほどポイント数が多くなり、パスの精度が高くなります。
これでRoboDKにインポートされたパスが表示されるはずです。この例では、また向きが間違っているので、前のパーツと同じように向きを修正する必要があります。
1.パスをダブルクリックします。この例では、
2.開いたメニューの「その他のオプション」をクリックします。
3.Move geometry(ジオメトリの移動)に進み、X軸(水色)に90を入力します。
4.Apply Moveをクリックして向きを保存します。

1.
2.ロボット、リファレンス、ツールが正しいものであることを確認してください。
3.カーブの選択]をクリックします。
4.他の円を選択します。
5.
注:パスを右クリックし、Switch sense(センスの切り替え)を選択すると、パスの方向を切り替えることができます。
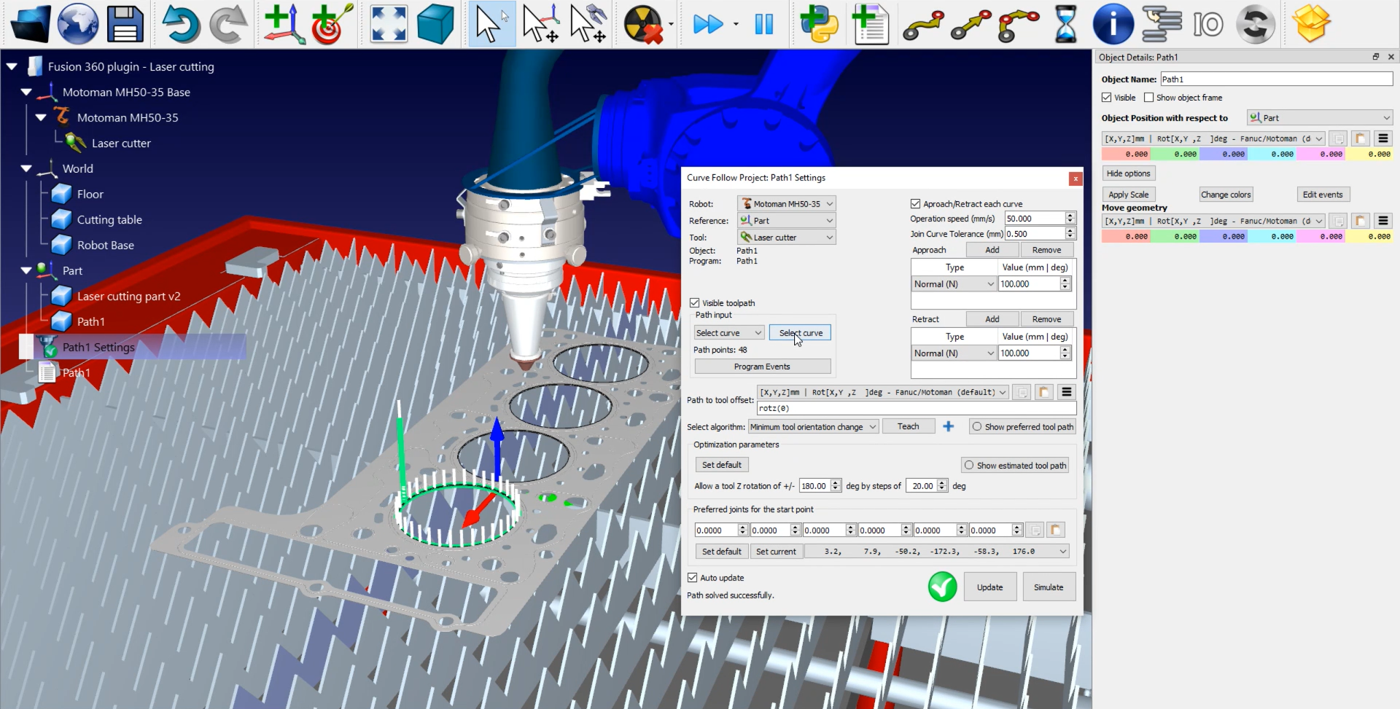
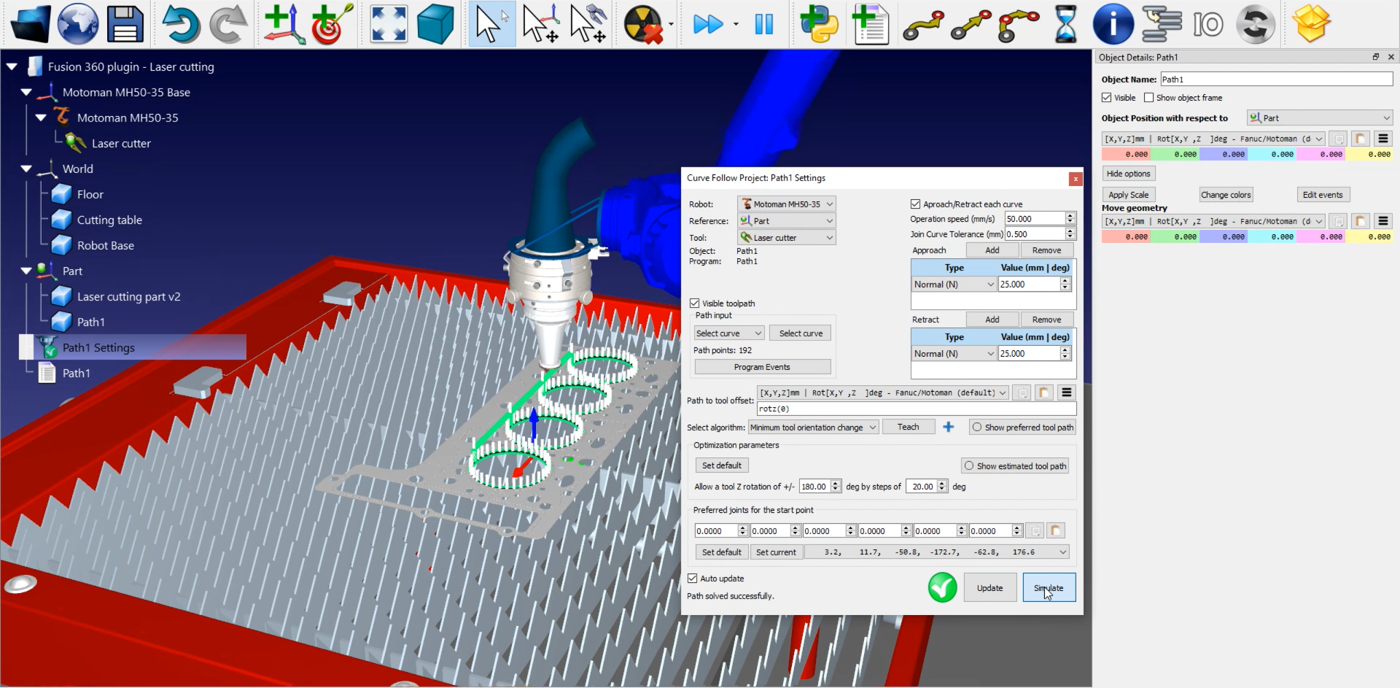
アプローチとリトラクトの動作の長さが少し長すぎることにお気づきでしょうか。
これらの値は、以下の方法で簡単に変更できます:
1.
2.Approach とRetract のボックスに小さい値を入力します。この例では25mmを入力します。
3.Update➔ Simulate をクリックしてください。
次のステップは、レーザーの半径を考えることです。この例では、レーザーが材料を切りすぎています。
レーザー半径の設定方法
1.Fusion 360に戻ります。
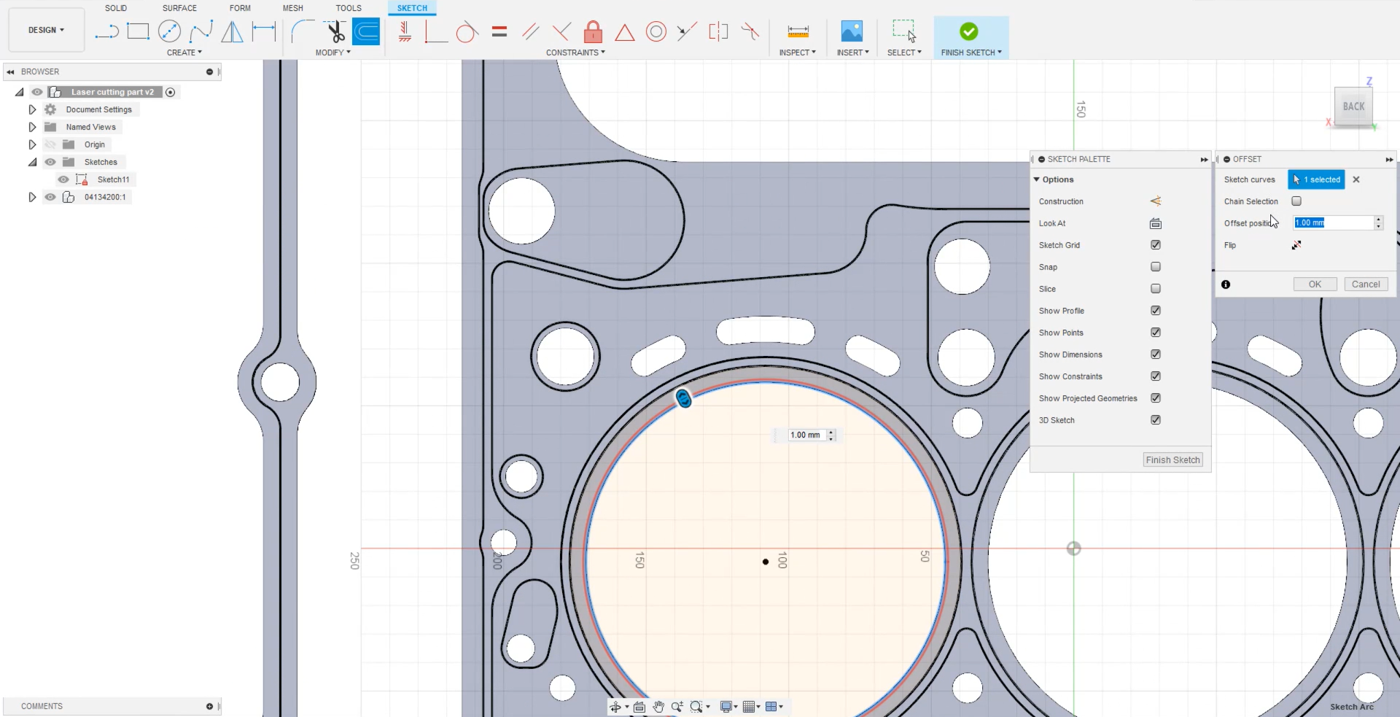
2.Solid➔ Create Sketchタブでスケッチを作成します。
3.円を1つ選択し、上部メニューの「オフセット」をクリックして新しいパスを作成します。
4.レーザービームの直径が2mmとすると、半径は1mmになります。下図のように、オフセット位置のボックスに1を入力します。
5.他の3つの円も同じ手順を繰り返します。
6.Okをクリックします。
これでRoboDKにカーブを読み込むことができます。
1.ツール」タブを開きます。
2.RoboDK➔ 負荷曲線をクリックします。
3.カーブを選択し、各円のスケッチをクリックします。
4.Facesを選択し、ツールをノーマルにしたい顔をクリックします。
5.この例では、オブジェクト名(基本設定)は Path2 です。
6.OkをクリックしてパスをRoboDKにインポートします。
上で説明したように、パス2の向きを変更することができます。近づいてみると、2つのパスの違いがわかります。これで Path1 を削除できます。
次のステップは、読み込んだパスセクションが正しいかどうかを確認することです:
1.
2.曲線の選択]をクリックし、下図のように他の円を選択します。
3.
上で説明したように、アプローチとリトラクトの動きを小さくすることができます。この例では、25mmと入力します。設定を保存するために、忘れずにUpdate➔ Simulate your Curve Follow Projectを実行してください。このパーツの他の穴も同じ手順で設定できます。
このレーザー切断プログラムの作り方は、RoboDKのFusion 360プラグインでも使えますが、すべてのCADプラグインでも使えます。