RoboDK
ここでは、RoboDK でピックアンドプレースアプリケーション用の新しいプロジェクト(ステーションとも呼ばれます)を作成する方法を説明します。
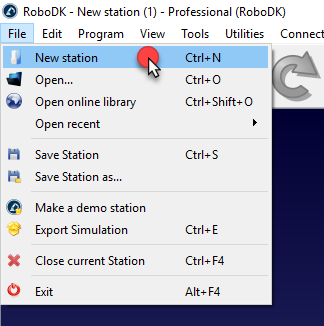
1.RoboDKを開く: コンピュータでRoboDKアプリケーションを起動します。
2.新しいステーションを作成します:RoboDKのメインメニューから「ファイル」-「新規ステーション」を選択すると、新しい空のステーションがワークスペースとして作成されます。
3.ライブラリからロボットを追加
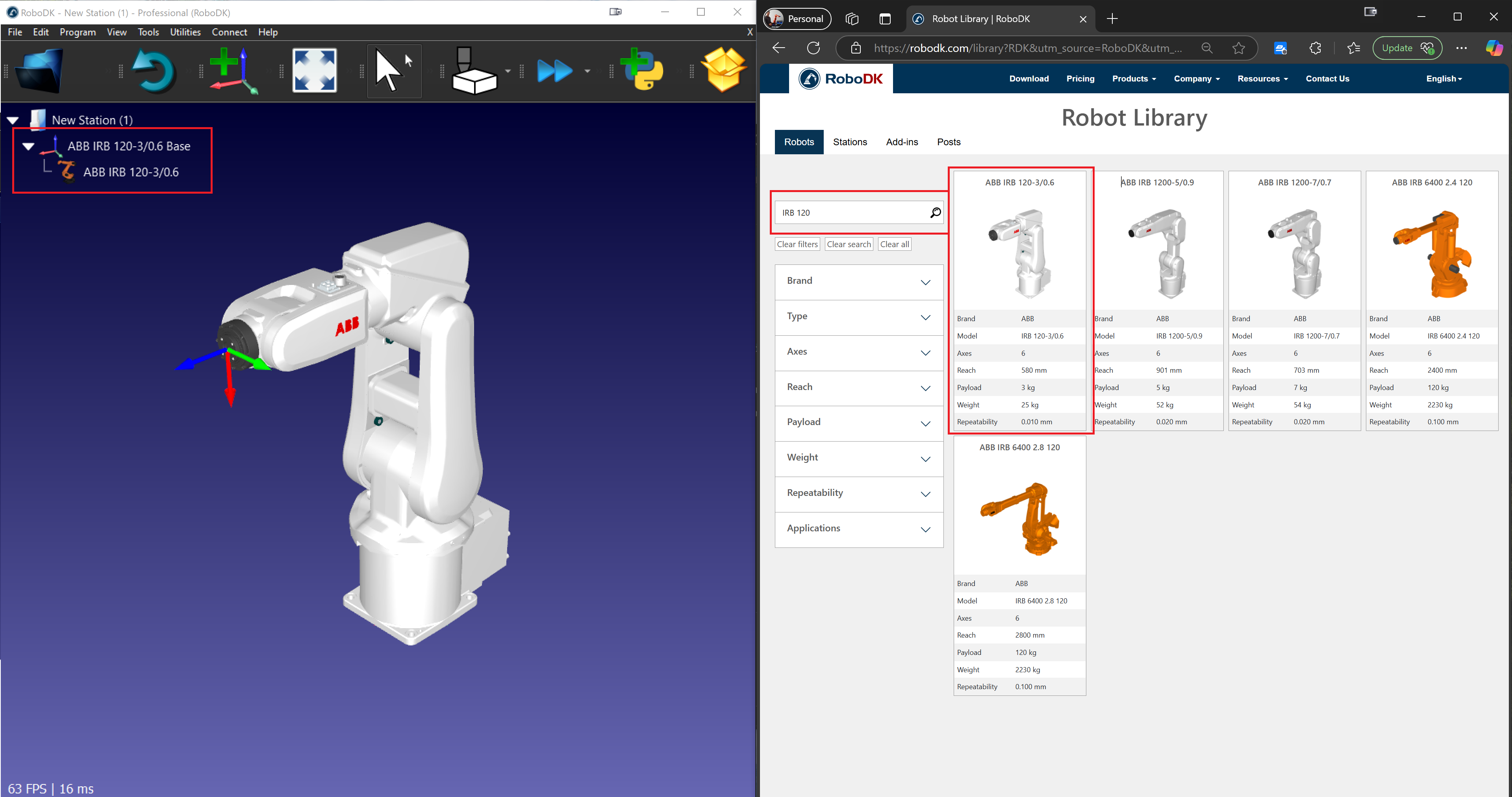
a.オンラインロボットライブラリを開いてロボットをダウンロード
i.メインメニューの「ファイル」→「オンラインライブラリを開く」を選択します。
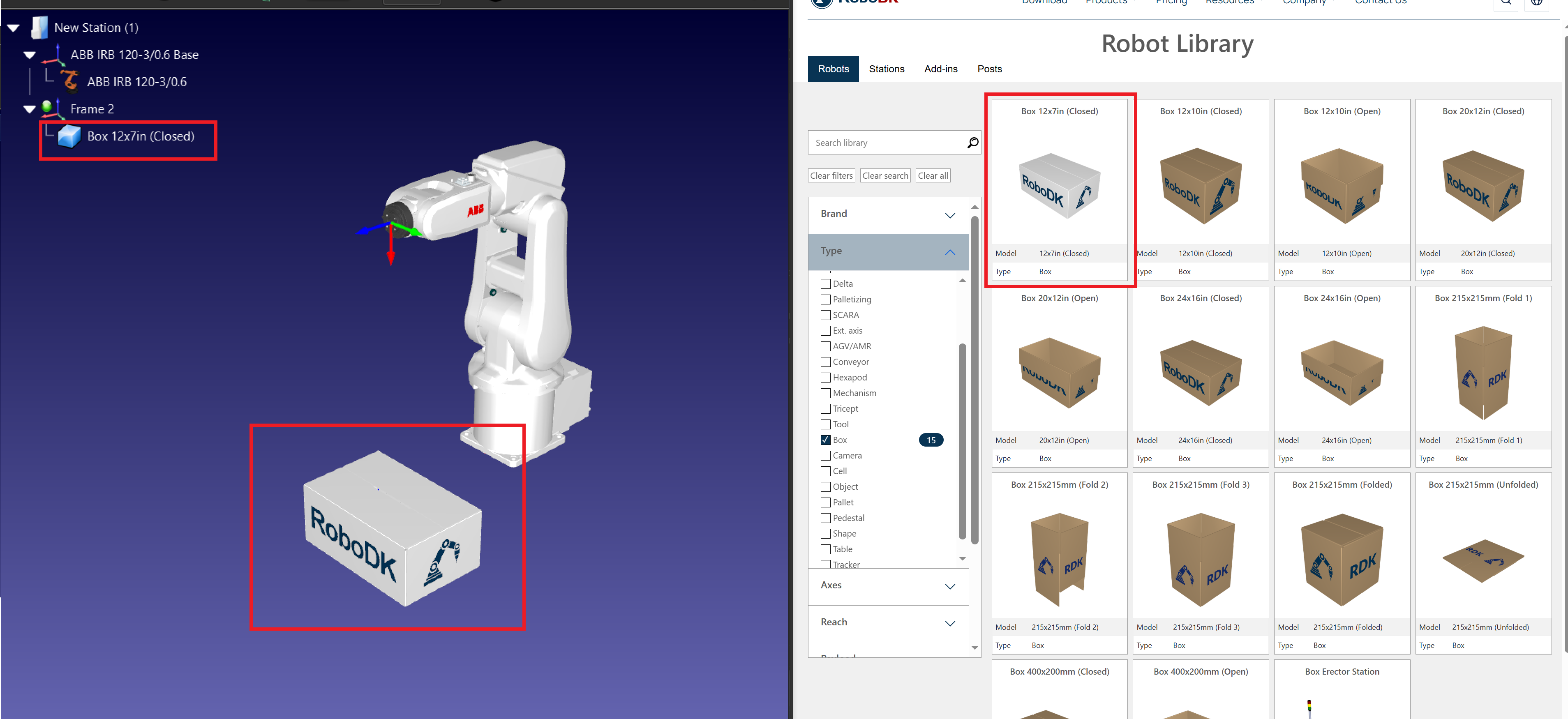
ii.RoboDKライブラリのウィンドウが開き、さまざまな産業用ロボットが表示されます。
b.ロボットの選択とインポート
i.検索バーを使用して、ピックアンドプレース作業に適したロボットを検索します(例:UR10、ABB IRB 120、Fanuc LR Mate)。
ii.目的のロボットをクリックし、ダウンロードを選択します。
c.ロボットをステーションに配置します:
i.ロボットは自動的にステーションに現れます。
ii.必要に応じて移動ツールを使って配置を調整します。
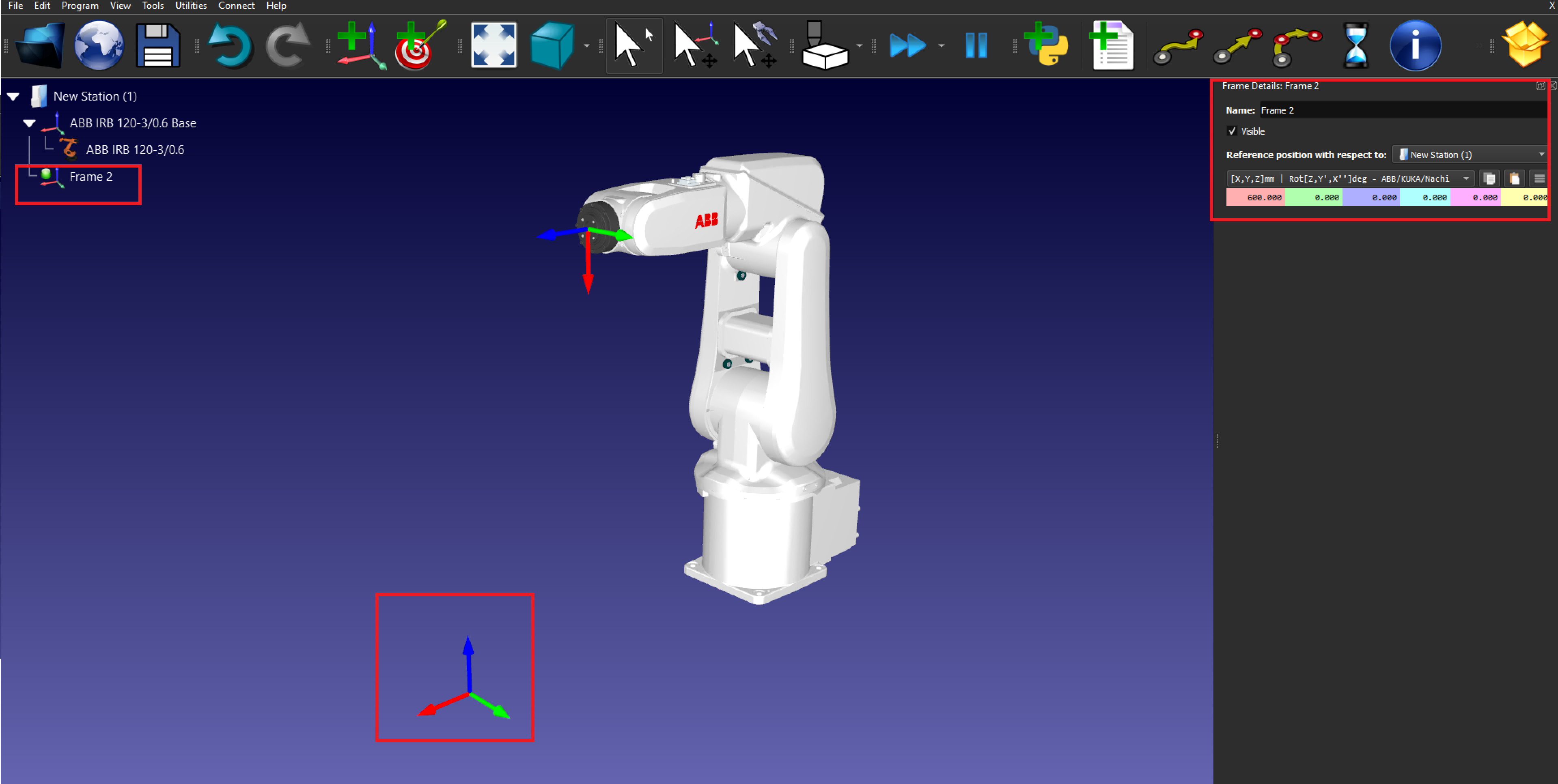
4.基準フレームの追加
a.基準フレームの作成
i.Program → Add Reference Frame へ進みます。
ii.ステーションツリーと3Dビューに新しいリファレンスフレームが表示されます。
b.基準フレームの位置
i.参照フレームをダブルクリックして、座標(X、Y、Z)と回転値を入力します。
ii.OKをクリックして位置を保存します。
5.3Dオブジェクトのインポート
a.オブジェクトモデルをロードします:
iii.メインメニューで、ファイル → 開くを選択します。
iv.ピックして配置するオブジェクトの3Dモデル(STEP、IGESファイルなど)をブラウズして選択します。
b.オブジェクトを配置します:
v.移動ツールを使って、参照フレーム内でのオブジェクトの配置を調整します。
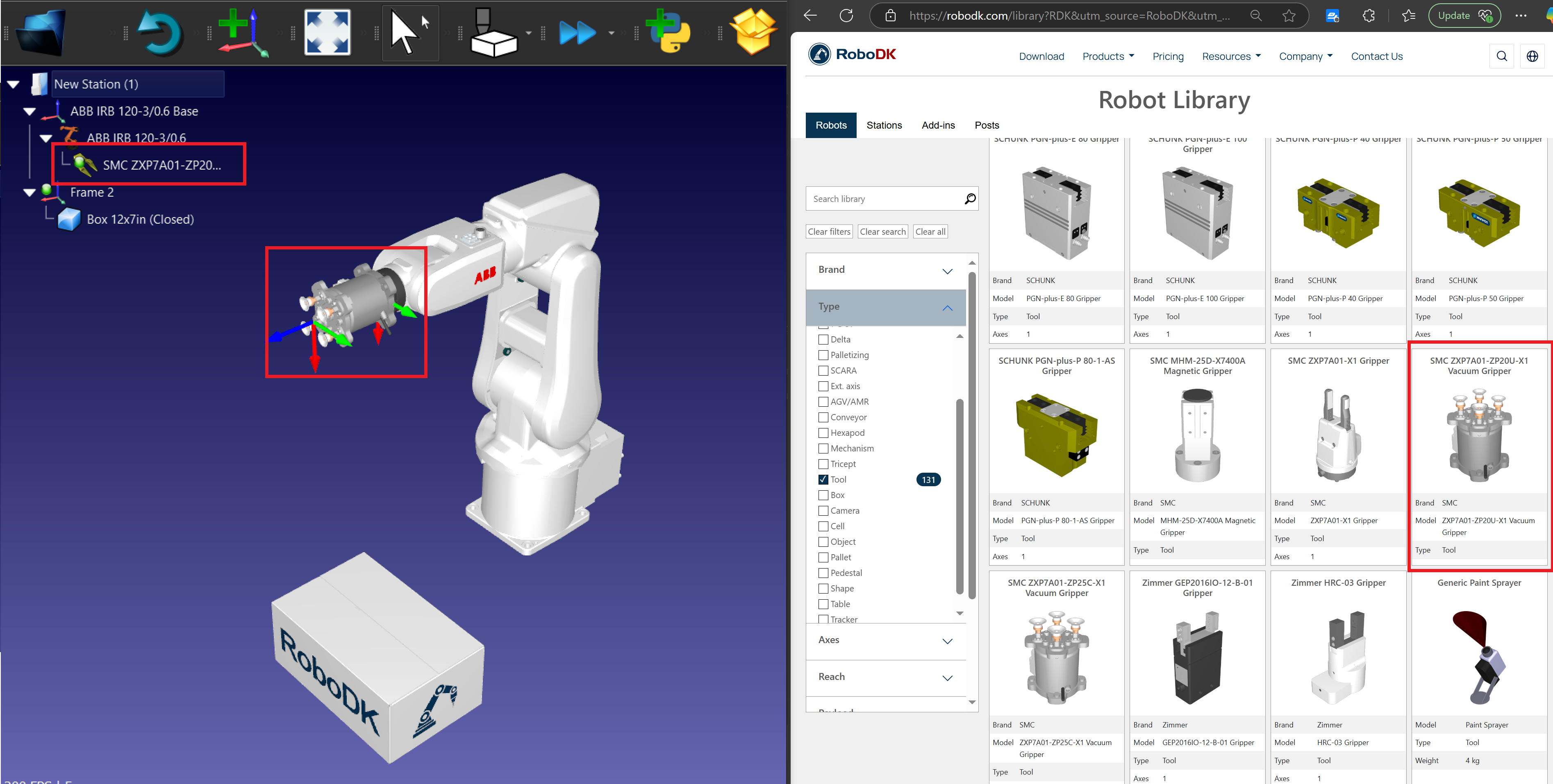
6.ツール(グリッパー)の追加
a.グリッパーを選択してください:
i.メインメニューの「ユーティリティ」→「ツールの追加(TCP)」を選択します。
ii.ロボットライブラリからグリッパーを選択するか、カスタムグリッパーファイルをインポートします。
b.ロボットにツールを取り付けます:
i.ステーションツリーでグリッパーを右クリックし、Attach to Robot を選択します。
ii.適切なロボットフランジを選択してください。
c.TCP(ツール中心点)を定義します:ツールをダブルクリックし、ロボットフランジに対するTCP座標を入力します。