Create Targets for Pick and Place
RoboDK でピックアンドプレースアプリケーション用の基本ターゲットを作成するには、以下の手順に従ってください。
7.ピック&プレースターゲットを追加します:
a.ロボットを希望のピック位置に移動します。
b.Program → Teach Target を選択し、位置を保存します。
c.ピック、リトラクト・ピック、プレース、リトラクト・プレースの位置を繰り返します。
8.ターゲットの整理
a.わかりやすいようにターゲットの名前を変更します(例:Approach_Pick、Pick、Place)。ターゲット名を変更するにはF2を押します。
b.ステーションツリーの関連する参照フレームの下にターゲットを作成することを忘れないでください。
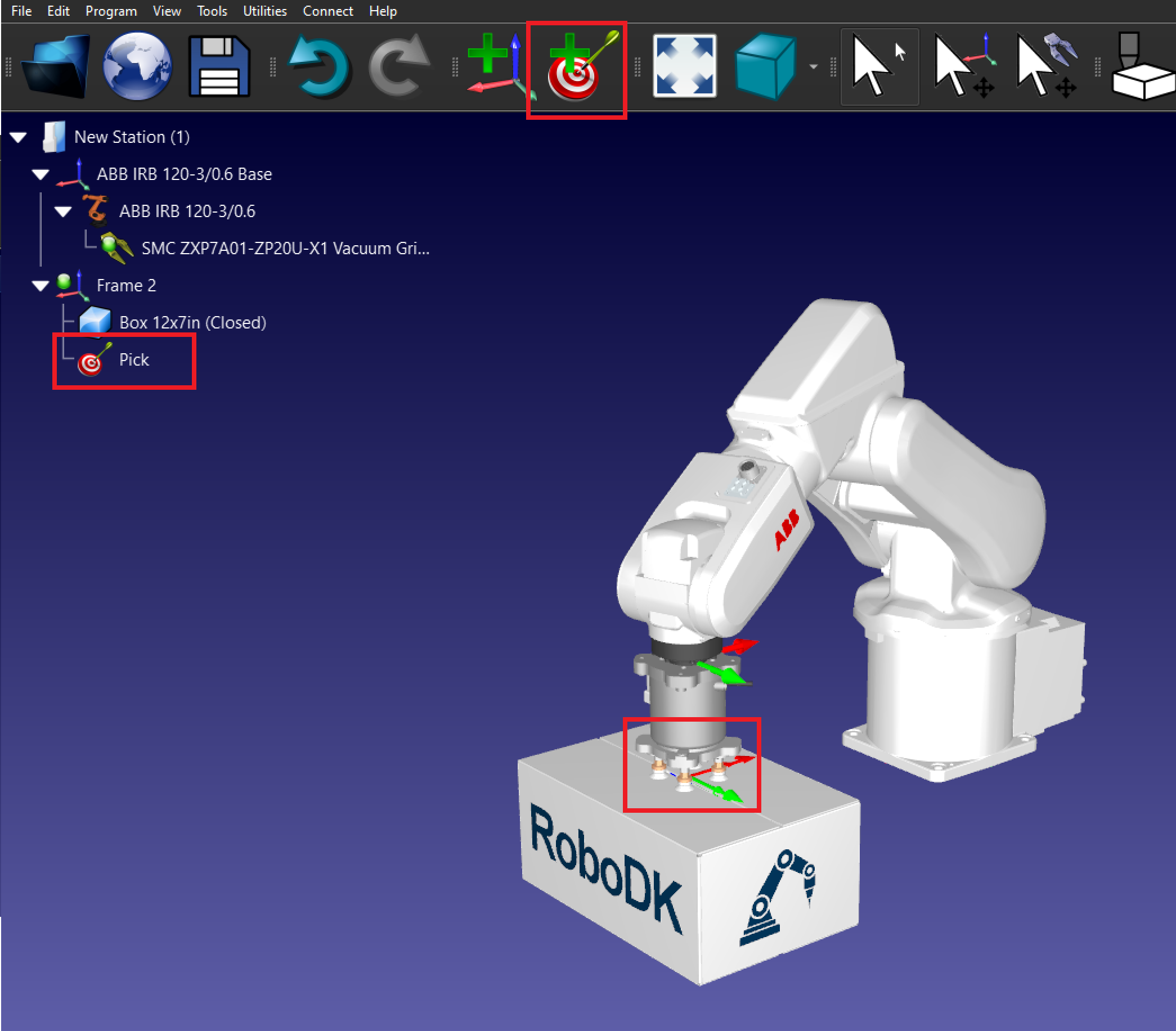
9.Pickターゲットを作成します:ロボットを箱の上に置き、Pickというターゲットを作成します。
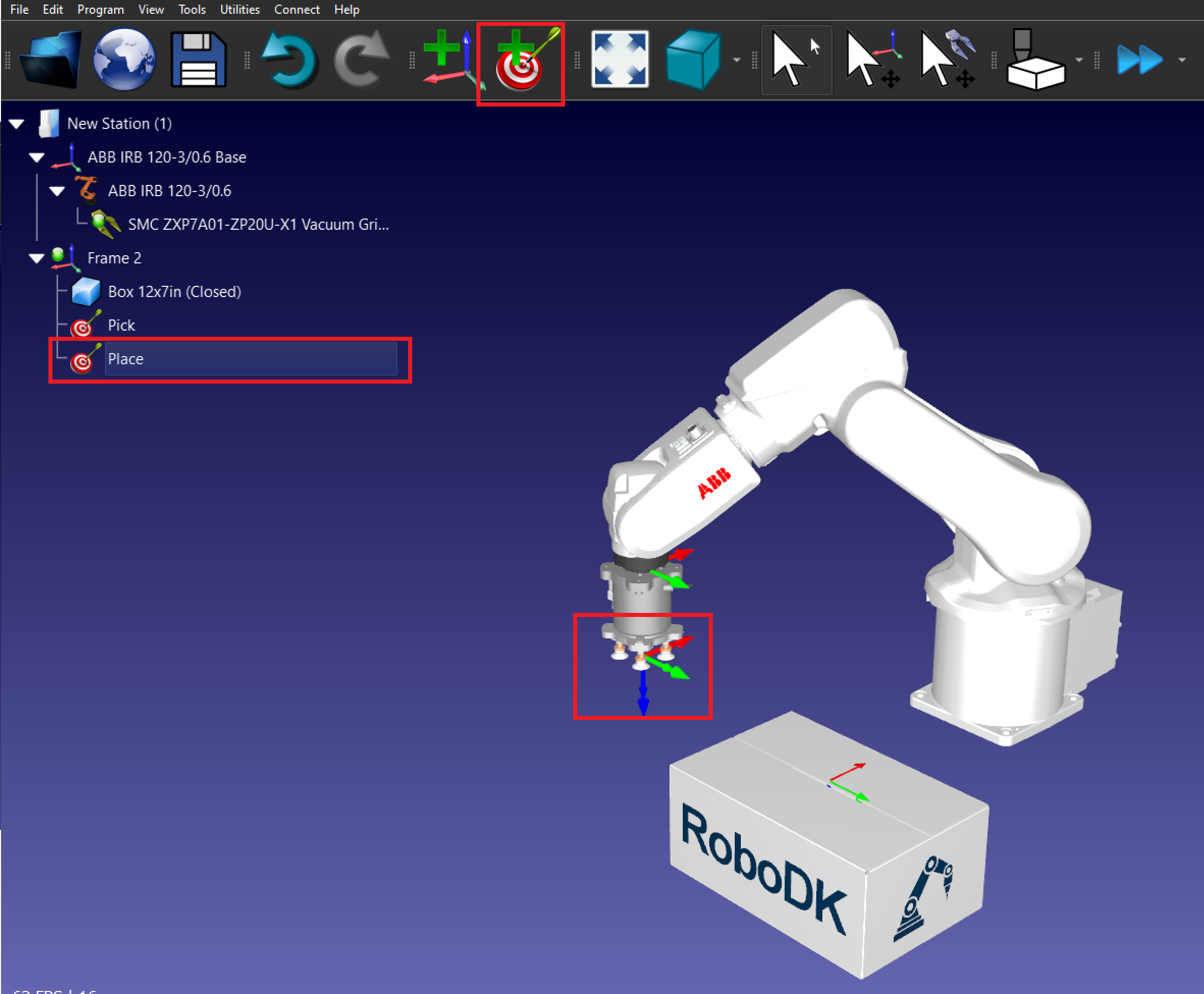
10.Place ターゲットを作成します:ロボットを箱を置きたい場所に移動させ、Placeというターゲットを作成します。
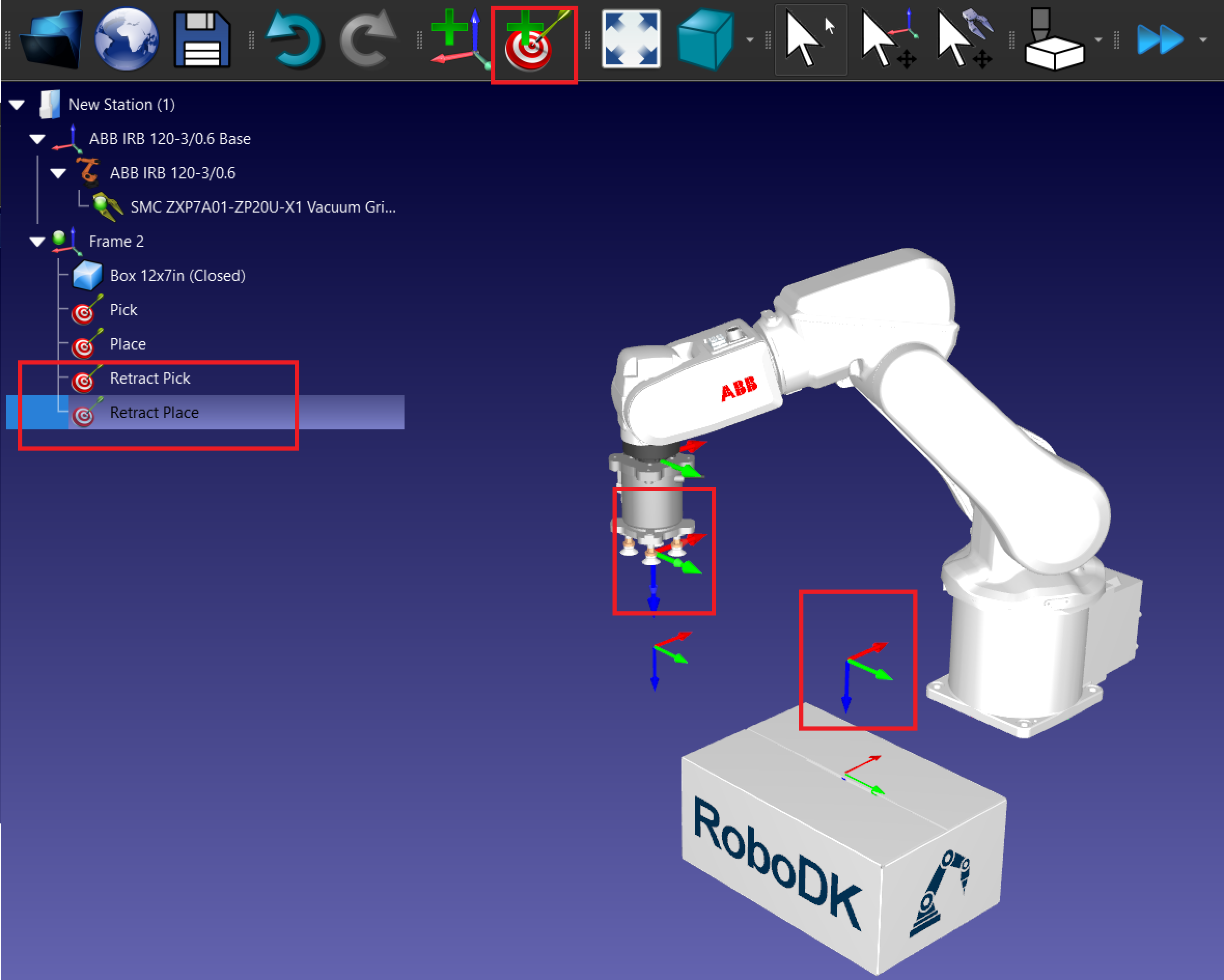
11.Retract ターゲットを作成します:
a.ロボットをピックターゲットに移動させ、Z軸を上に移動させます。
b.Pick Retract」という新しいターゲットを作成します。
c.プレースターゲットで繰り返します。