ピック&プレース・プログラムの作成
以下の手順に従って、RoboDKで6軸ロボットアームとバキュームグリッパーを使って箱を移動する基本的なピック&プレースプログラムを作成してください。
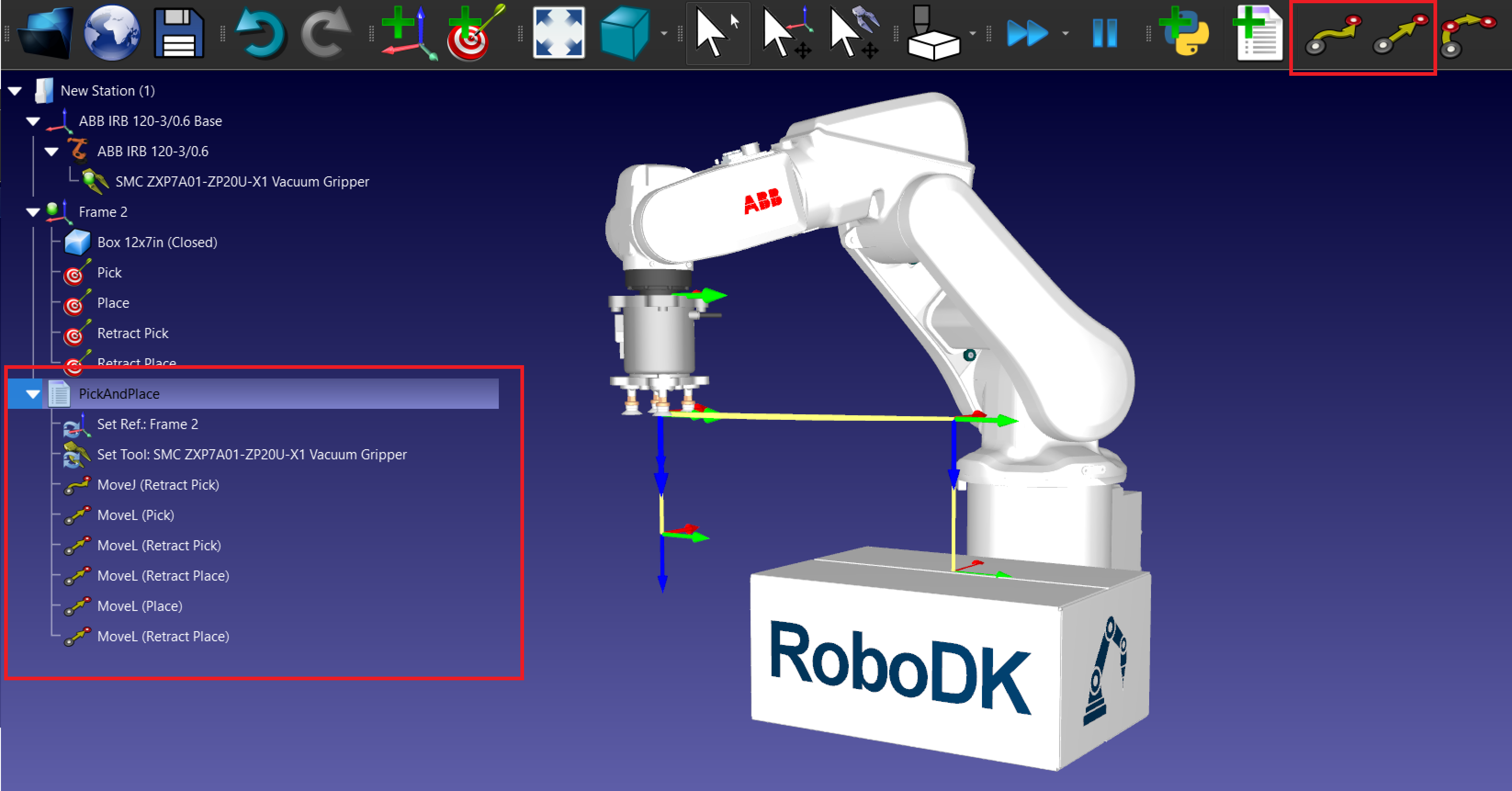
1.ピックアンドプレース作業のプログラム :
a.新しいプログラムを作成します:Program → Add Programと進み、PickAndPlaceと名付けます。
b.移動の指示を追加します:
i.各ターゲットに MoveJ または MoveL 命令を追加します。
ii.まずロボットをリトラクトターゲットに移動させ、次にピックターゲットにMoveLを作成し、リトラクトに戻ります。
iii.プレースターゲットで繰り返します。
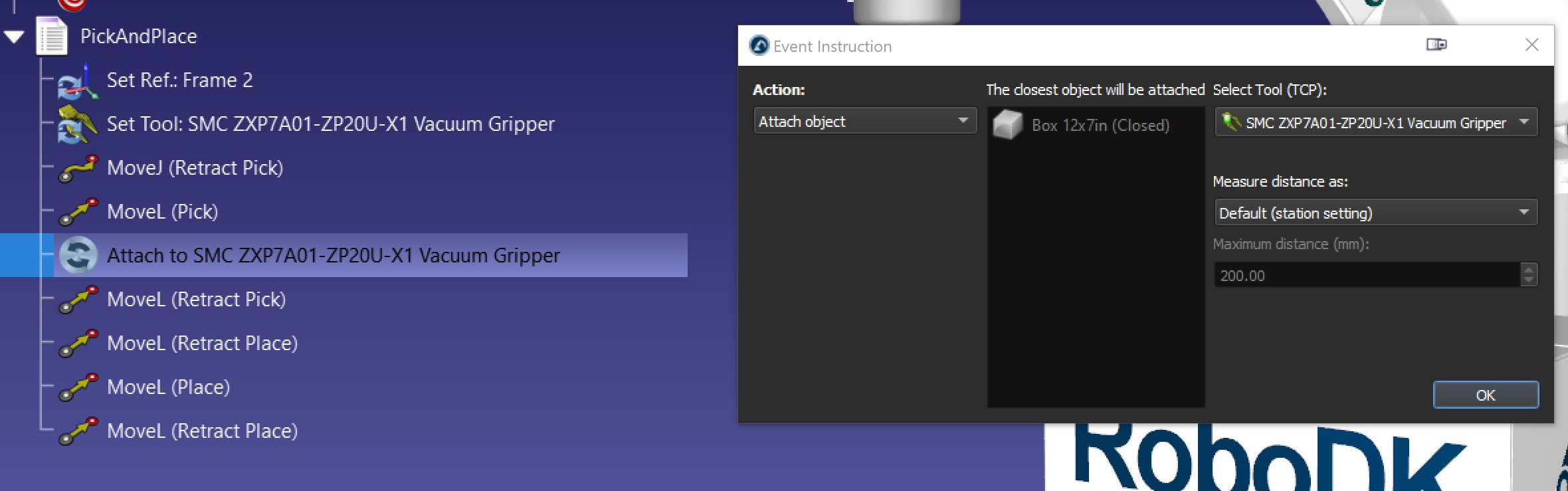
2.オブジェクトをピックして配置するイベントを追加します。
a.イベントを追加するには、Program → Simulation Event Instructionに進みます。
b.MoveL(Pick)の後に、Attachオブジェクトをピックするアクションを持つイベントを追加します。
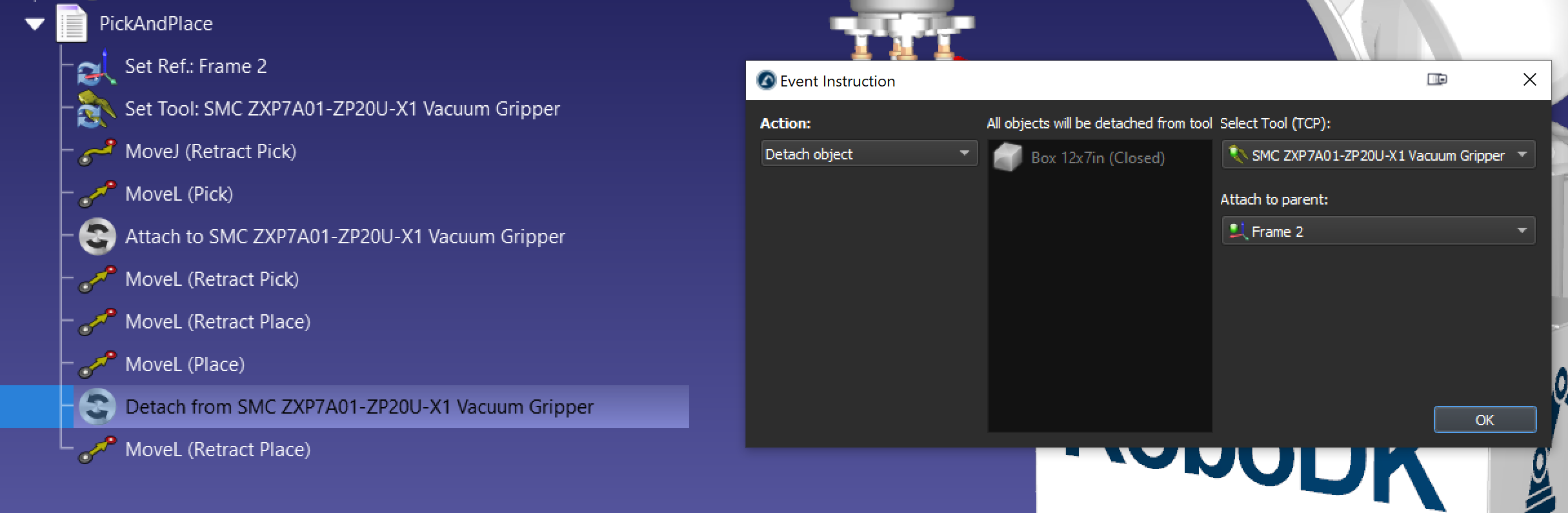
c.MoveL (Place)の後に、Detach オブジェクトがボックスを配置するアクションをウィットしたイベントを追加します。Attach to parentオプションは、グリッパーからオブジェクトを切り離した後、新しいオブジェクトにアタッチすることができます。
d.必要であれば、イベントアクション Set object position を持つ別のプログラムを作成し、ボックスを原点位置に戻すとよいでしょう。
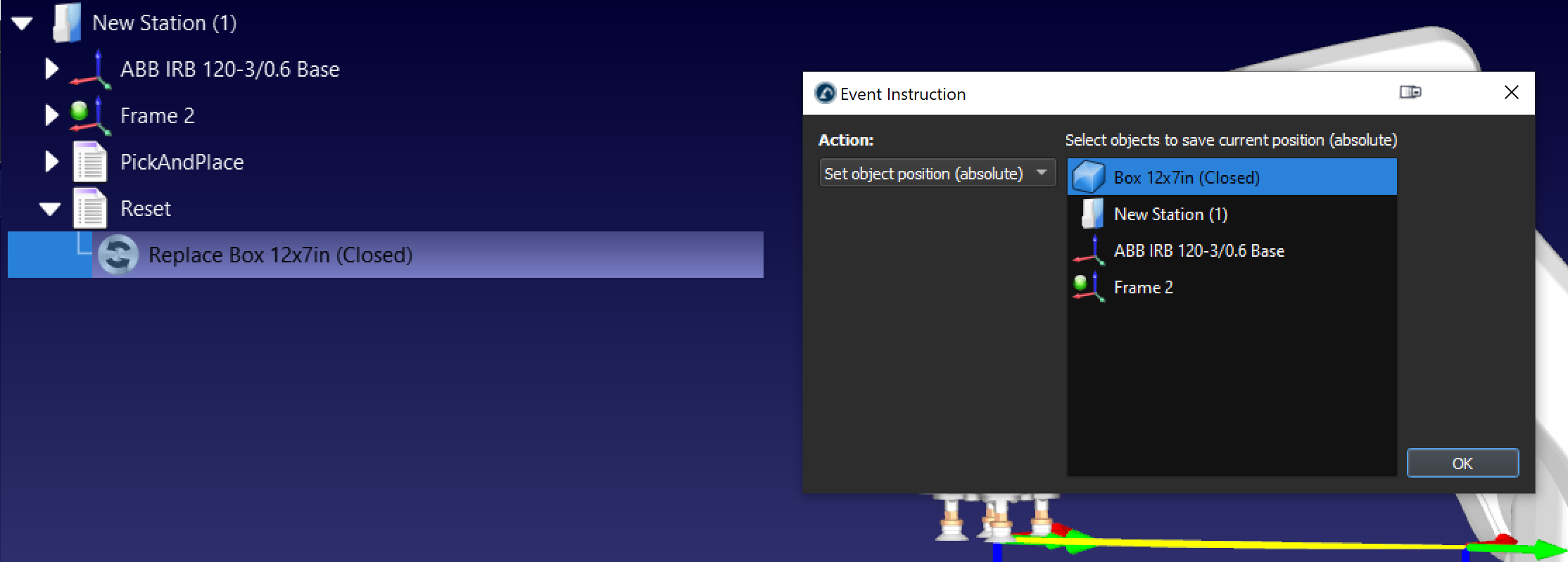
以下の手順で、RoboDKで基本的なピックアンドプレースステーションを作成することができます。