API
大型アセンブリのピッキングや、移動コンベアからの対象物のピッキングなど、より高度なピック&プレース操作が必要な場合は、APIを使用してピック&プレースアプリケーションをプログラムすることができます。
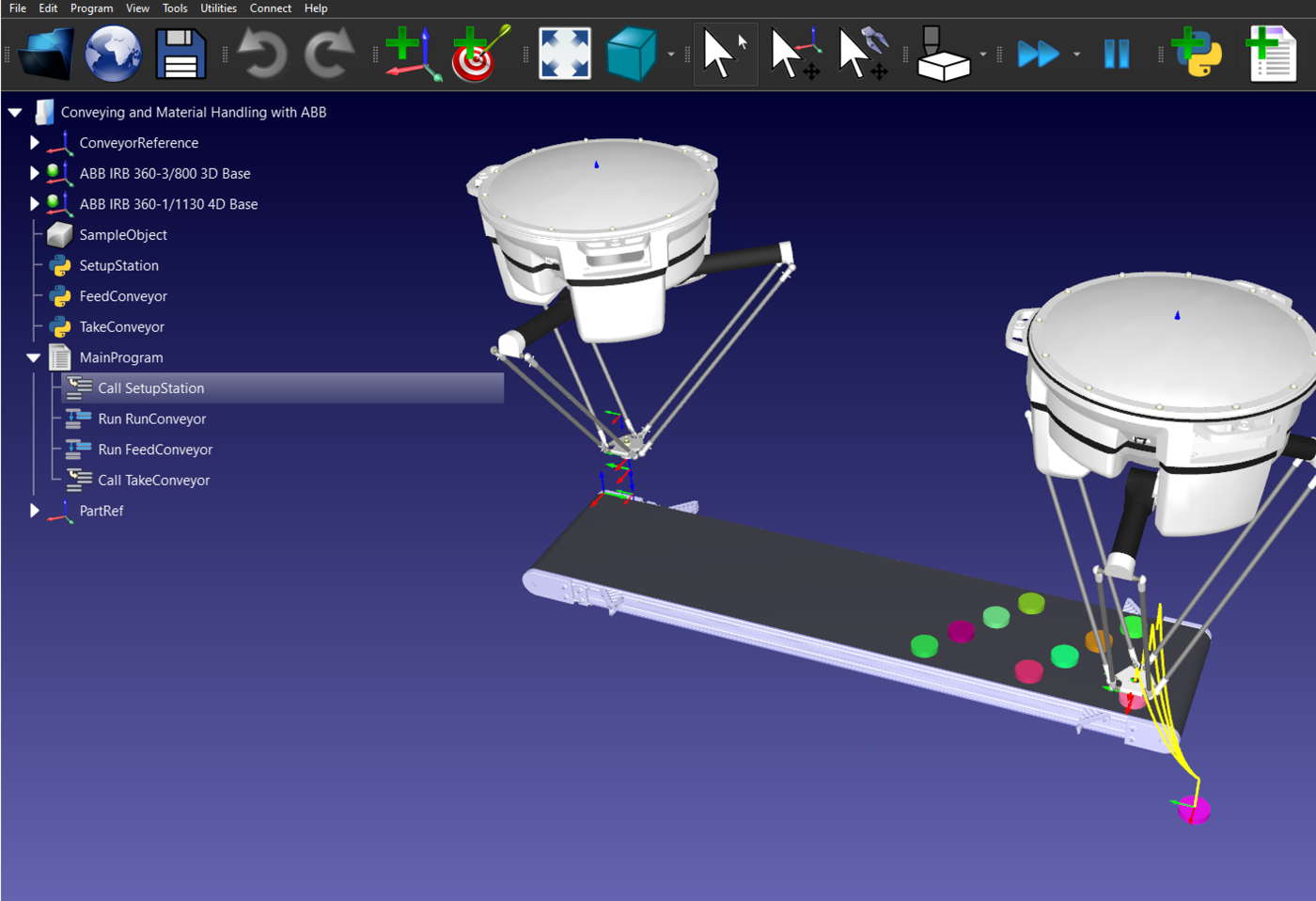
この例では、RoboDK API と Python を使って、移動するコンベア上にオブジェクトをピック&プレースしています。
ヒント: RoboDK API に関するこちらを詳しい情報はご覧ください。
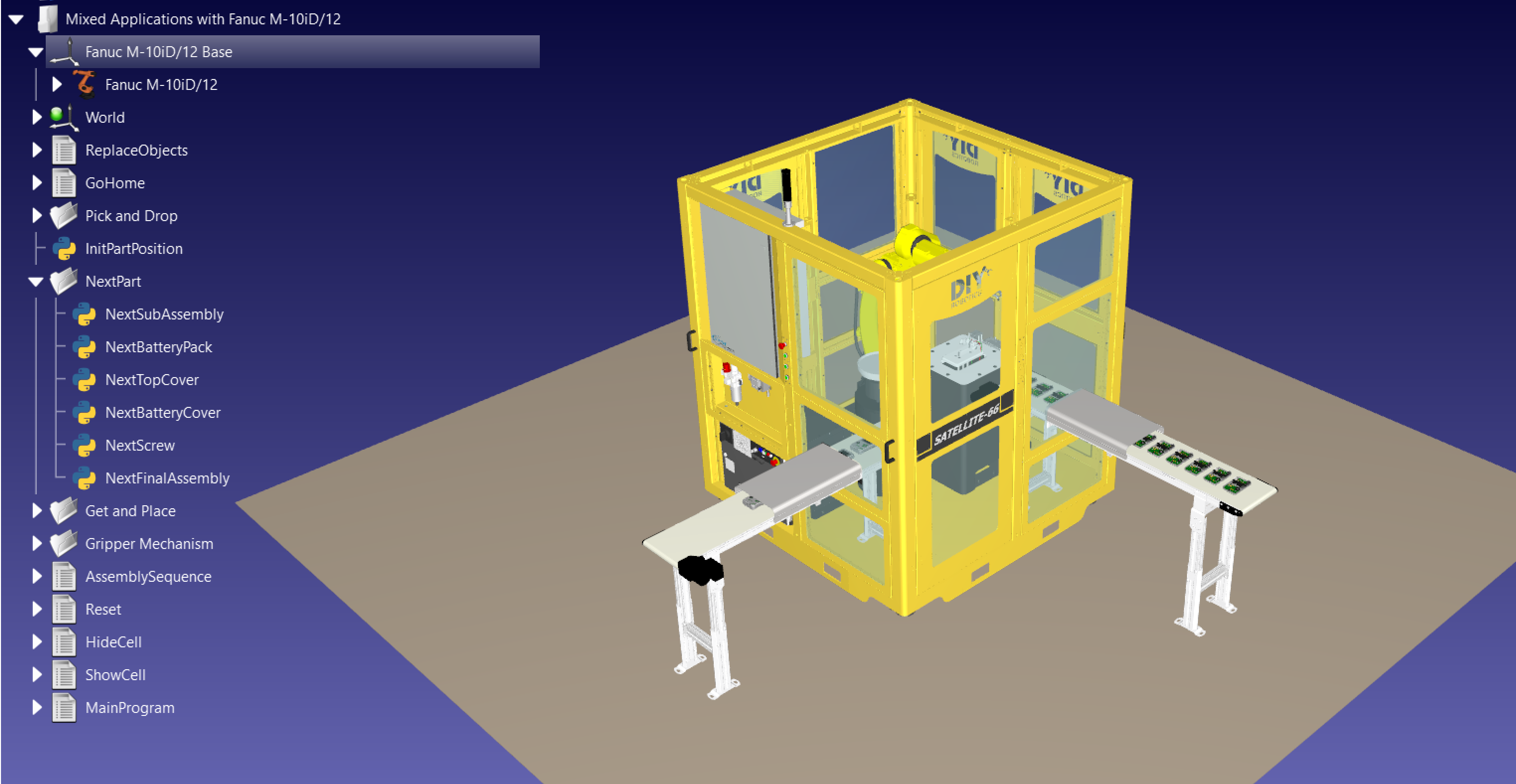
また、ピックアンドプレース操作を多用し、複数の部品を使用して最終的なアセンブリを作成するこのアセンブリステーションもご覧ください:ファナックM-10iD/12による混合アプリケーション。