Pick and Place
ピック&プレース入門
ピック&プレースとは、ロボットがある場所から部品やアイテムをピックアップし、別の場所に配置する自動化されたプロセスを指します。ピック&プレース作業を自動化することで、生産率を向上させることができます。
ピック&プレースロボットは、繰り返し作業を処理することで、人間の作業者はより複雑な作業に集中することができます。このようなロボットシステムは、多くの製造業や生産ラインにおいて、反復的で時間のかかる作業を自動化するための重要なコンポーネントとなっています。
ビデオロボットによるピック&プレイスについて紹介するビデオチュートリアルをご覧ください:ピックアンドプレース - RoboDK Webinar.
ロボットアームはピックアンドプレース作業を簡単に行うことができます。特定のピックアンドプレースアプリケーション(パレタイジングのためのパレタイジングロボットやPCBアセンブリのためのスカラロボットなど)専用のロボットアームがあっても、一般的な6軸ロボットアームはあらゆるピックアンドプレース作業に適しています。
ピックアンドプレースの例
ピック&プレース・シミュレーションのサンプル・プロジェクトは、このセクションにあります。
このセクションの例には以下が含まれます:
1.ロボットが部品をピックし、別の場所に落とすという単純なピック&プレースの例。
2.組立作業を伴うピックアンドプレースの例。
3.パレタイジング Add-in を使用したピックアンドプレースの例です。
4.APIを使用したピックアンドプレースの例です。
ヒント: RoboDKのオンラインライブラリには、ピックアンドプレースやマテリアルハンドリングのプロジェクト例が多数掲載されています。
シンプルなピックアンドプレースの例
このセクションでは、バキュームグリッパー付きのロボットアームを使用して、1つの箱を移動させる簡単なピック&プレースの例を示します。
ヒントRoboDKで新しいプロジェクトをゼロから作成する方法については、スタートガイドに従ってください。
以下の手順に従って、ピック&プレイス例を作成してください:
RoboDK プロジェクトの新規作成
ここでは、RoboDK でピックアンドプレースアプリケーション用の新しいプロジェクト(ステーションとも呼ばれます)を作成する方法を説明します。
1.RoboDKを開く: コンピュータでRoboDKアプリケーションを起動します。
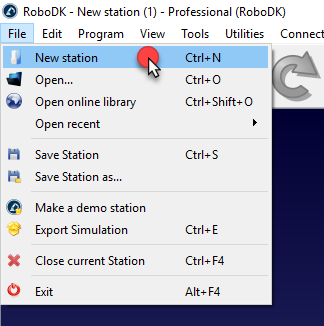
2.新しいステーションを作成します:RoboDKのメインメニューから「ファイル」-「新規ステーション」を選択すると、新しい空のステーションがワークスペースとして作成されます。
3.ライブラリからロボットを追加
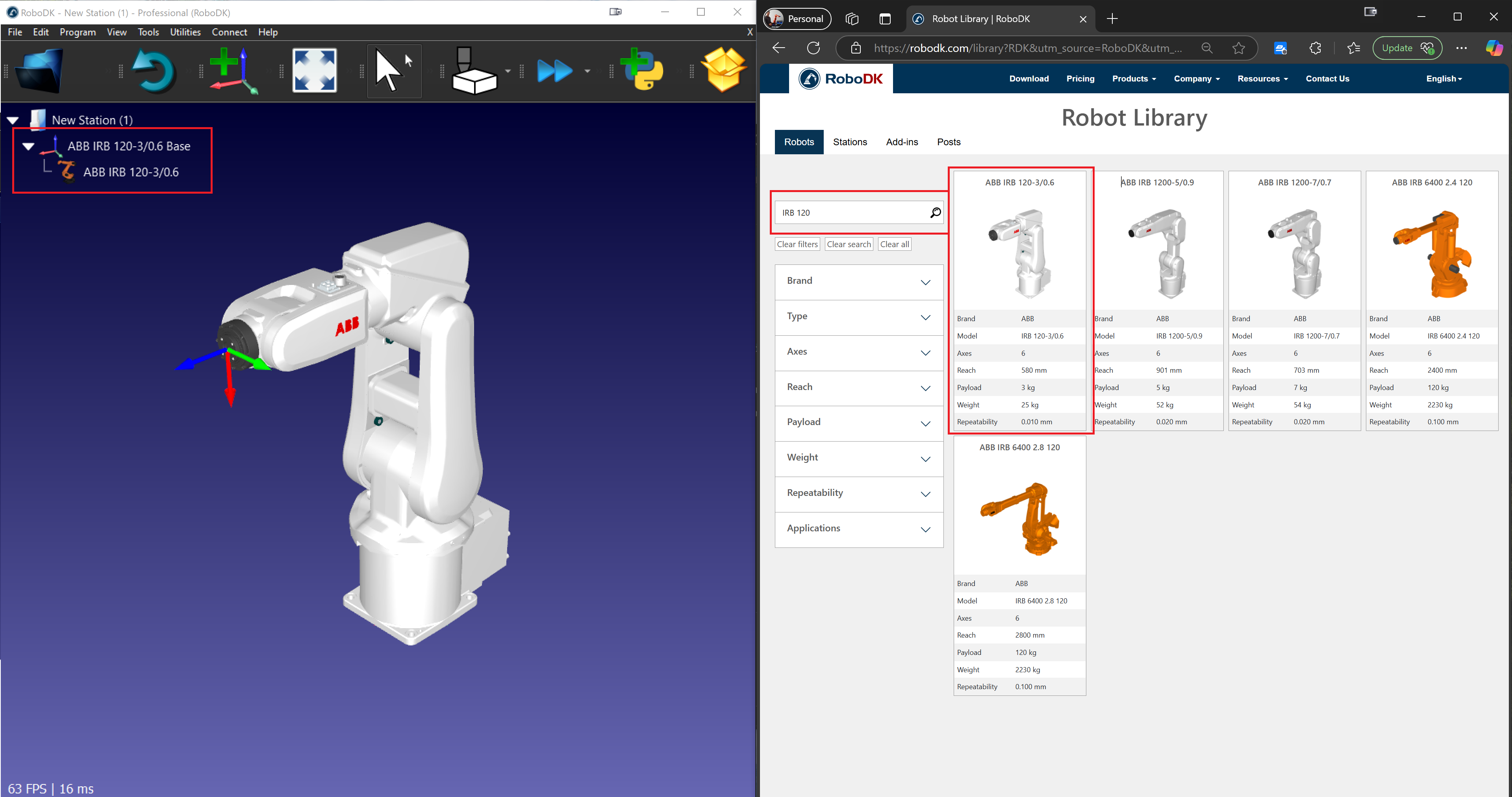
a.オンラインロボットライブラリを開いてロボットをダウンロード
i.メインメニューの「ファイル」→「オンラインライブラリを開く」を選択します。
ii.RoboDKライブラリのウィンドウが開き、さまざまな産業用ロボットが表示されます。
b.ロボットの選択とインポート
i.検索バーを使用して、ピックアンドプレース作業に適したロボットを検索します(例:UR10、ABB IRB 120、Fanuc LR Mate)。
ii.目的のロボットをクリックし、ダウンロードを選択します。
c.ロボットをステーションに配置します:
i.ロボットは自動的にステーションに現れます。
ii.必要に応じて移動ツールを使って配置を調整します。
4.基準フレームの追加
a.基準フレームの作成
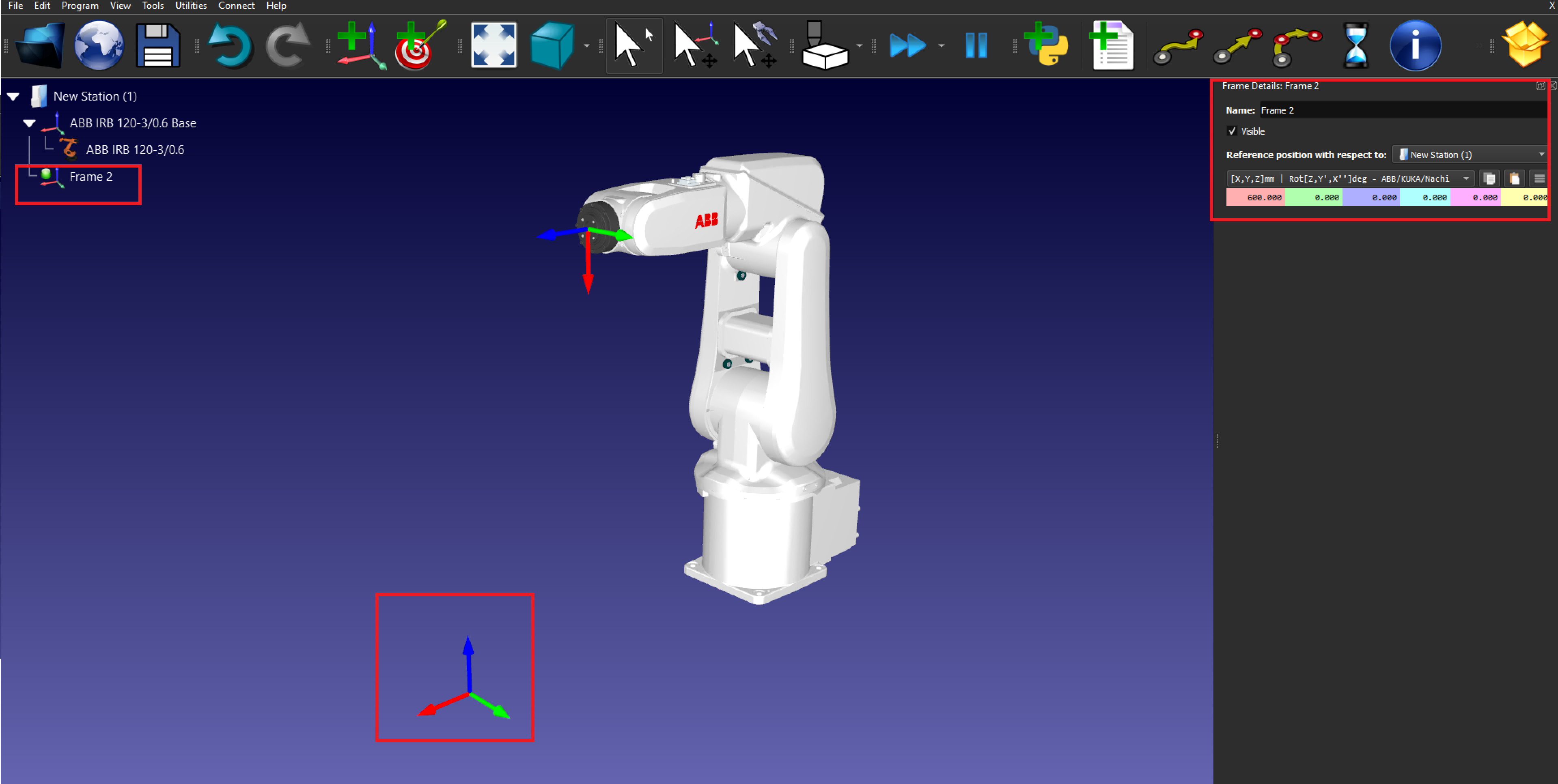
i.Program → Add Reference Frame へ進みます。
ii.ステーションツリーと3Dビューに新しいリファレンスフレームが表示されます。
b.基準フレームの位置
i.参照フレームをダブルクリックして、座標(X、Y、Z)と回転値を入力します。
ii.OKをクリックして位置を保存します。
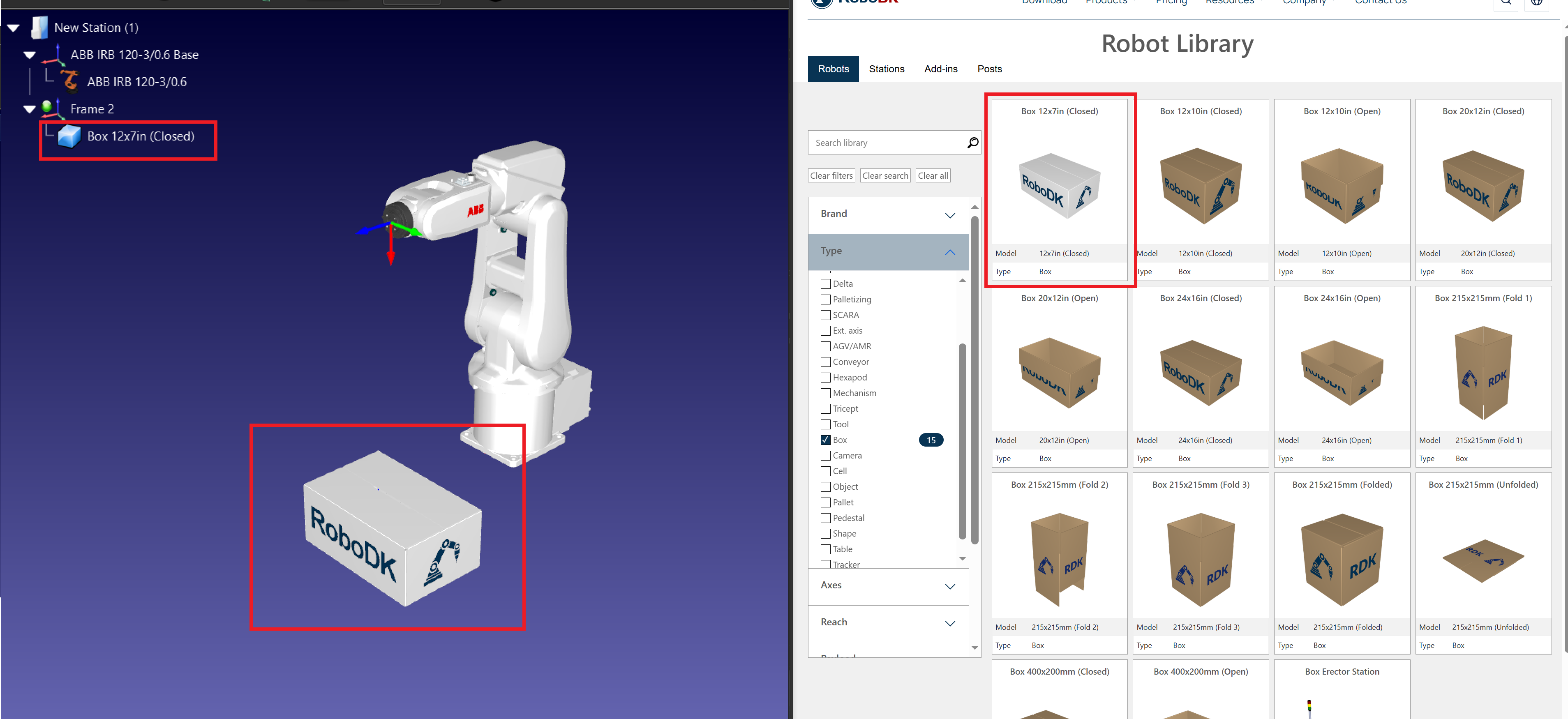
5.3Dオブジェクトのインポート
a.オブジェクトモデルをロードします:
iii.メインメニューで、ファイル → 開くを選択します。
iv.ピックして配置するオブジェクトの3Dモデル(STEP、IGESファイルなど)をブラウズして選択します。
b.オブジェクトを配置します:
v.移動ツールを使って、参照フレーム内でのオブジェクトの配置を調整します。
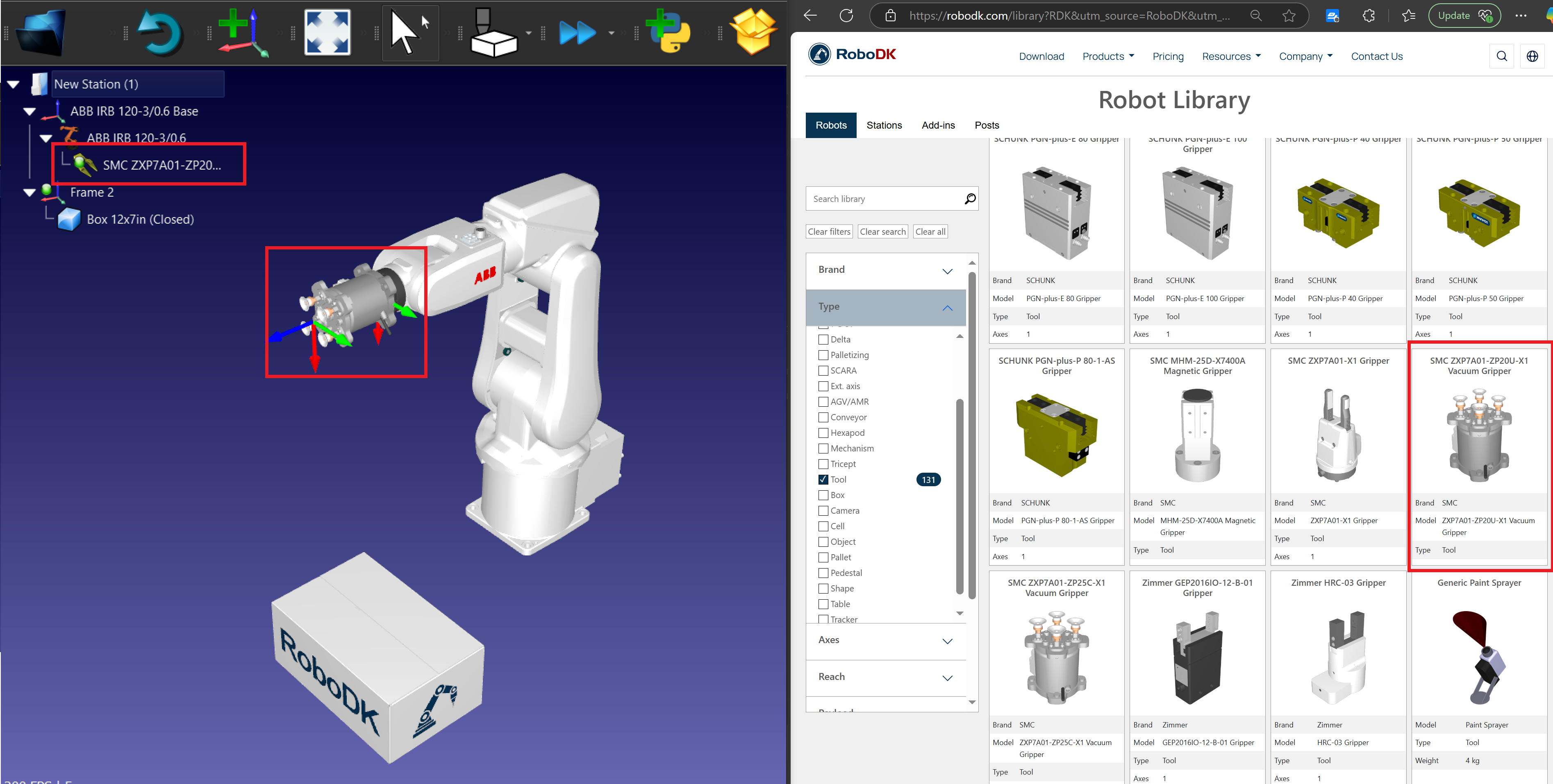
6.ツール(グリッパー)の追加
a.グリッパーを選択してください:
i.メインメニューの「ユーティリティ」→「ツールの追加(TCP)」を選択します。
ii.ロボットライブラリからグリッパーを選択するか、カスタムグリッパーファイルをインポートします。
b.ロボットにツールを取り付けます:
i.ステーションツリーでグリッパーを右クリックし、Attach to Robot を選択します。
ii.適切なロボットフランジを選択してください。
c.TCP(ツール中心点)を定義します:ツールをダブルクリックし、ロボットフランジに対するTCP座標を入力します。
Create Targets for Pick and Place
RoboDK でピックアンドプレースアプリケーション用の基本ターゲットを作成するには、以下の手順に従ってください。
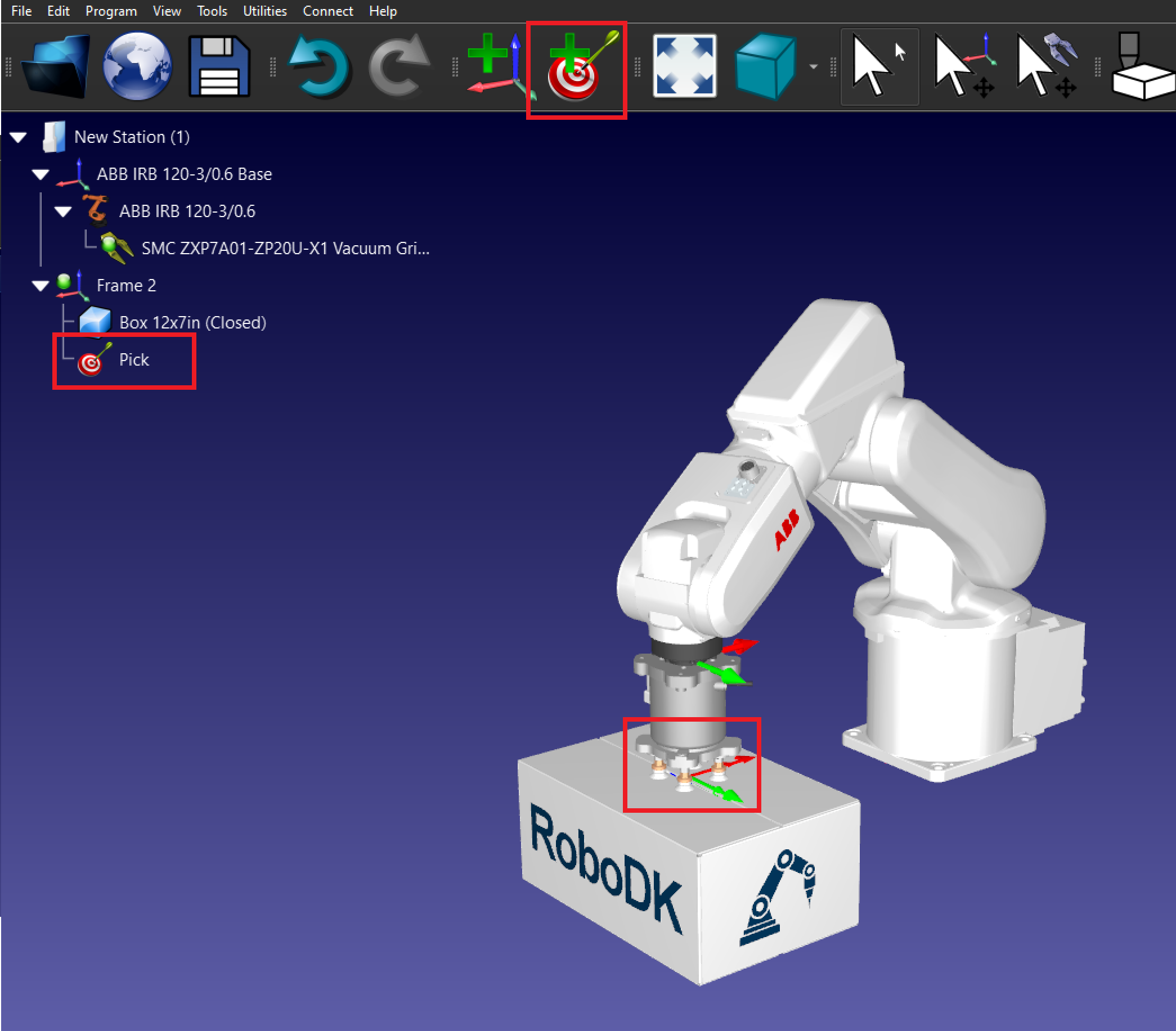
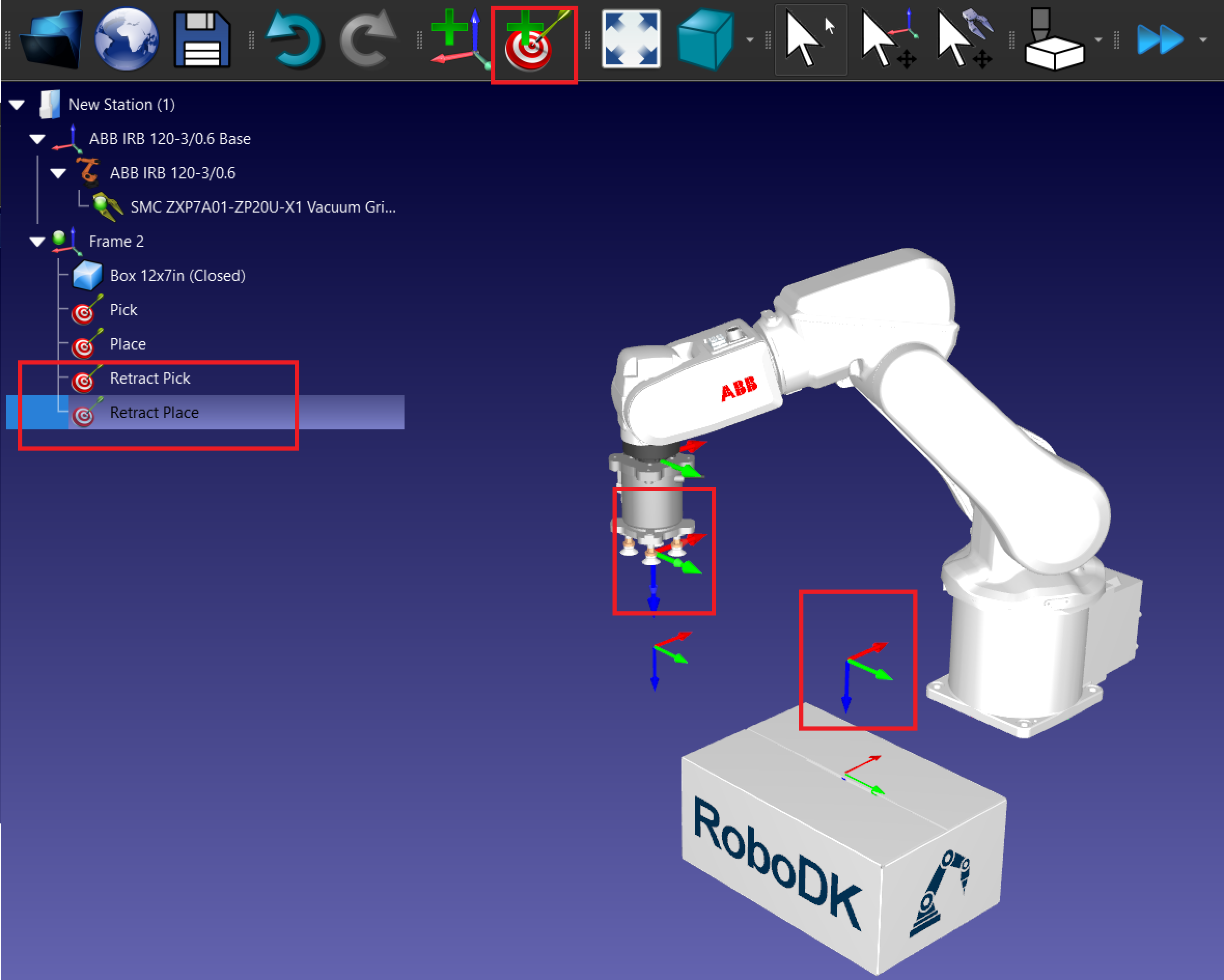
7.ピック&プレースターゲットを追加します:
a.ロボットを希望のピック位置に移動します。
b.Program → Teach Target を選択し、位置を保存します。
c.ピック、リトラクト・ピック、プレース、リトラクト・プレースの位置を繰り返します。
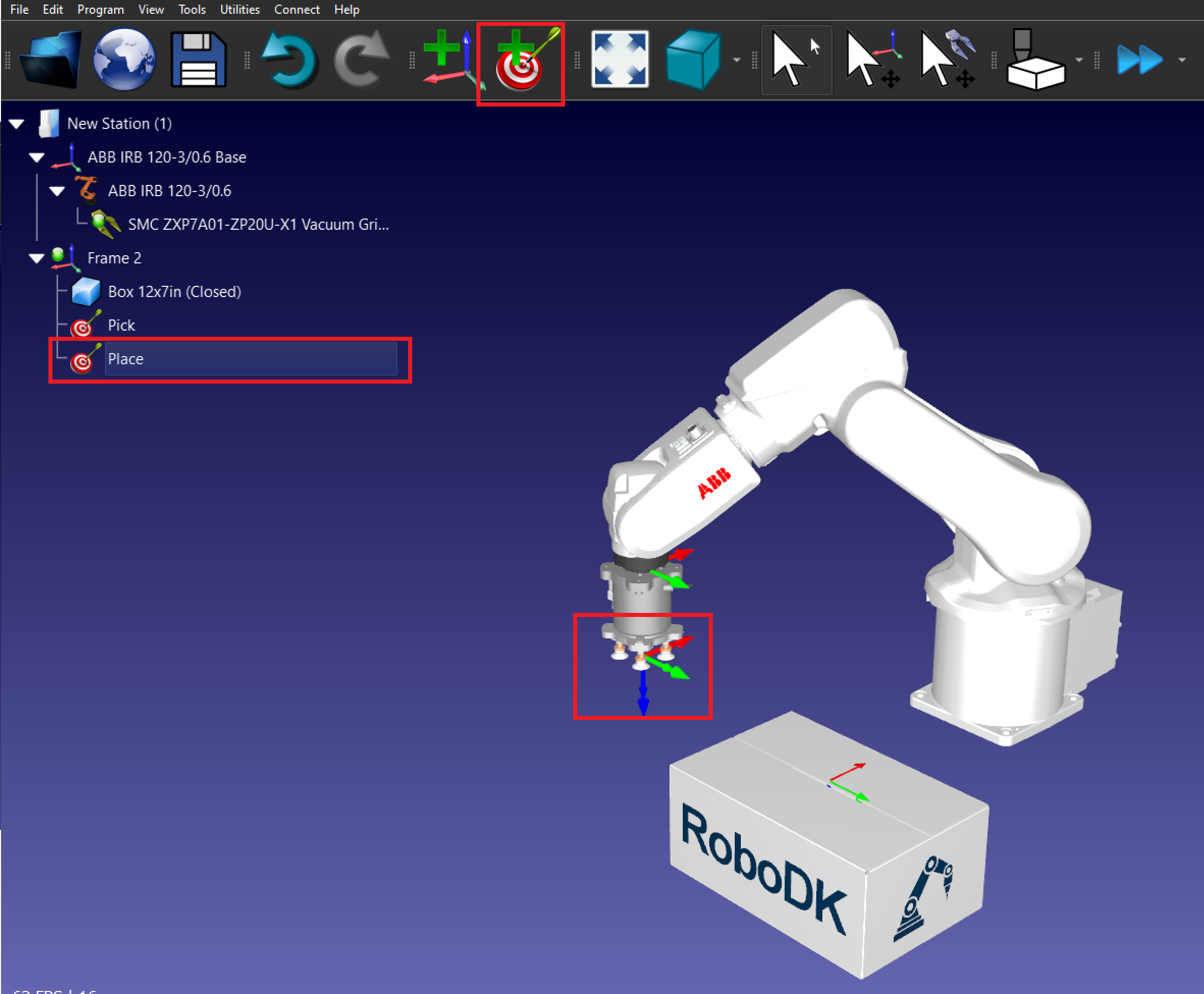
8.ターゲットの整理
a.わかりやすいようにターゲットの名前を変更します(例:Approach_Pick、Pick、Place)。ターゲット名を変更するにはF2を押します。
b.ステーションツリーの関連する参照フレームの下にターゲットを作成することを忘れないでください。
9.Pickターゲットを作成します:ロボットを箱の上に置き、Pickというターゲットを作成します。
10.Place ターゲットを作成します:ロボットを箱を置きたい場所に移動させ、Placeというターゲットを作成します。
11.Retract ターゲットを作成します:
a.ロボットをピックターゲットに移動させ、Z軸を上に移動させます。
b.Pick Retract」という新しいターゲットを作成します。
c.プレースターゲットで繰り返します。
ピック&プレース・プログラムの作成
以下の手順に従って、RoboDKで6軸ロボットアームとバキュームグリッパーを使って箱を移動する基本的なピック&プレースプログラムを作成してください。
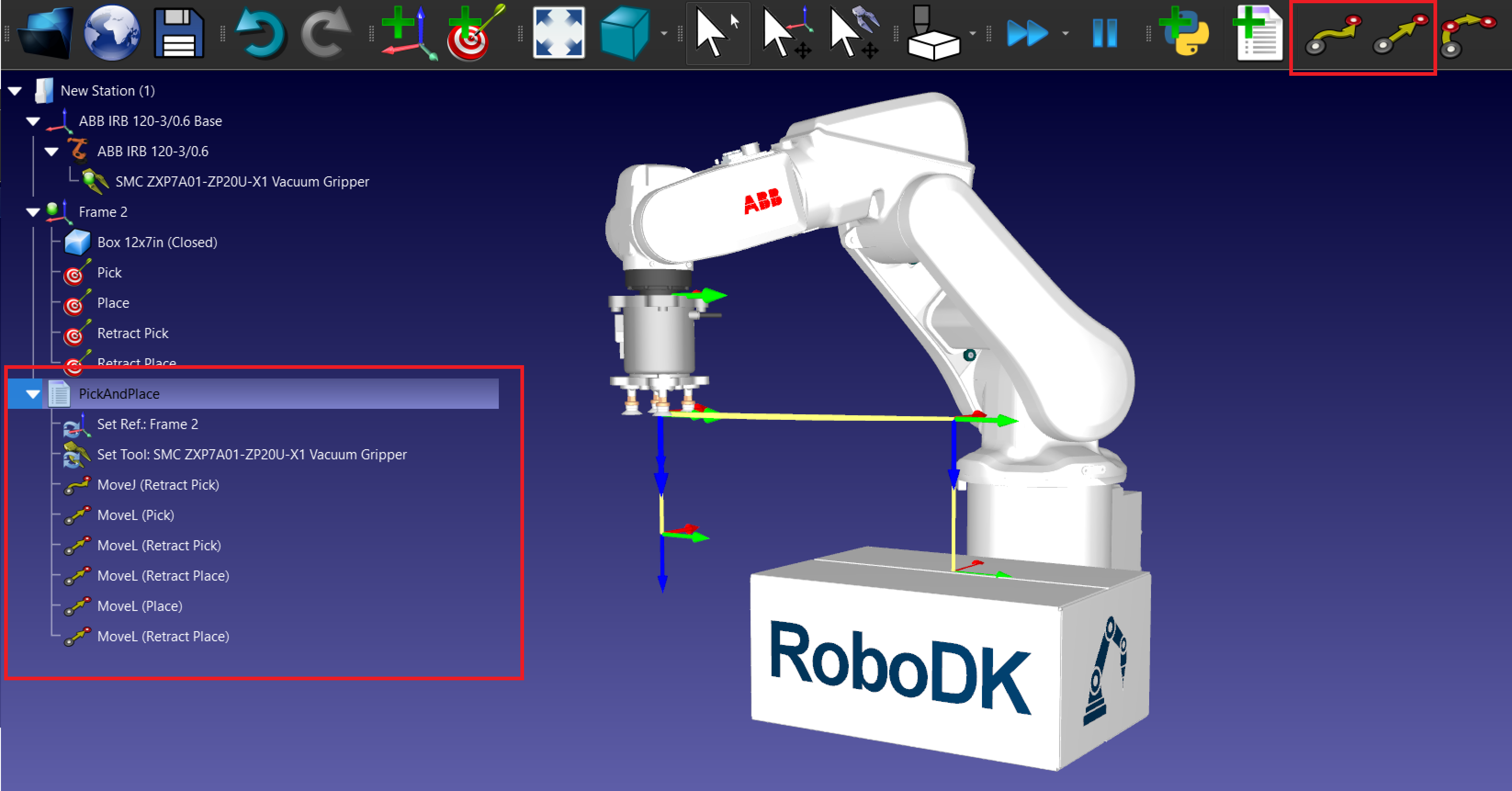
1.ピックアンドプレース作業のプログラム :
a.新しいプログラムを作成します:Program → Add Programと進み、PickAndPlaceと名付けます。
b.移動の指示を追加します:
i.各ターゲットに MoveJ または MoveL 命令を追加します。
ii.まずロボットをリトラクトターゲットに移動させ、次にピックターゲットにMoveLを作成し、リトラクトに戻ります。
iii.プレースターゲットで繰り返します。
2.オブジェクトをピックして配置するイベントを追加します。
a.イベントを追加するには、Program → Simulation Event Instructionに進みます。
b.MoveL(Pick)の後に、Attachオブジェクトをピックするアクションを持つイベントを追加します。
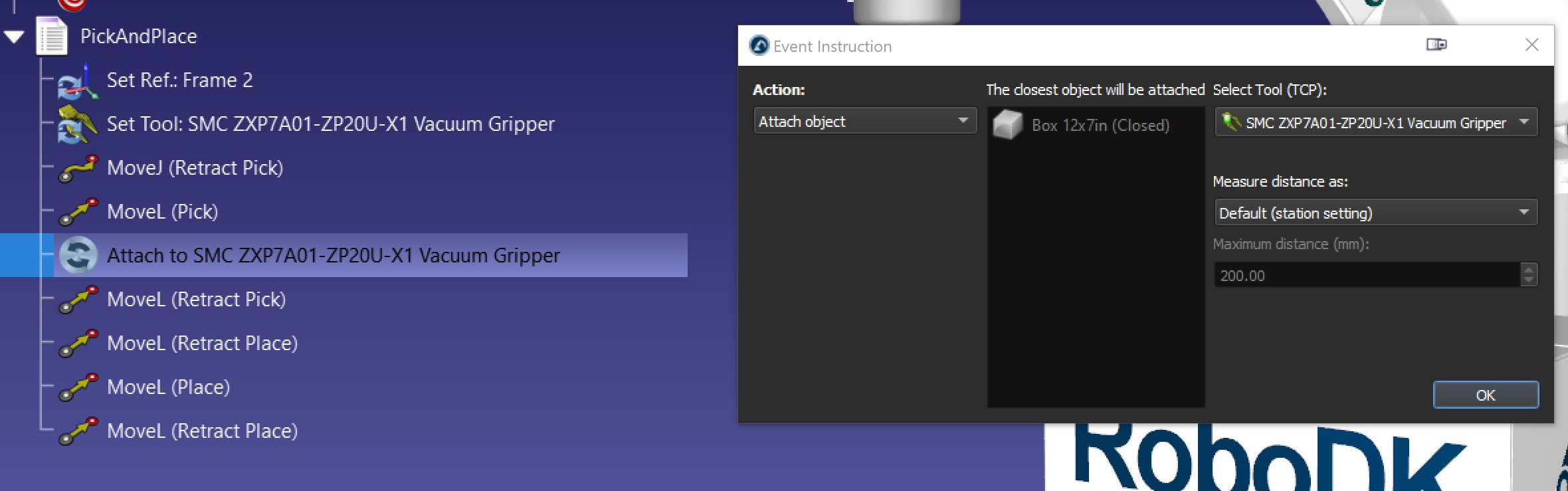
c.MoveL (Place)の後に、Detach オブジェクトがボックスを配置するアクションをウィットしたイベントを追加します。Attach to parentオプションは、グリッパーからオブジェクトを切り離した後、新しいオブジェクトにアタッチすることができます。
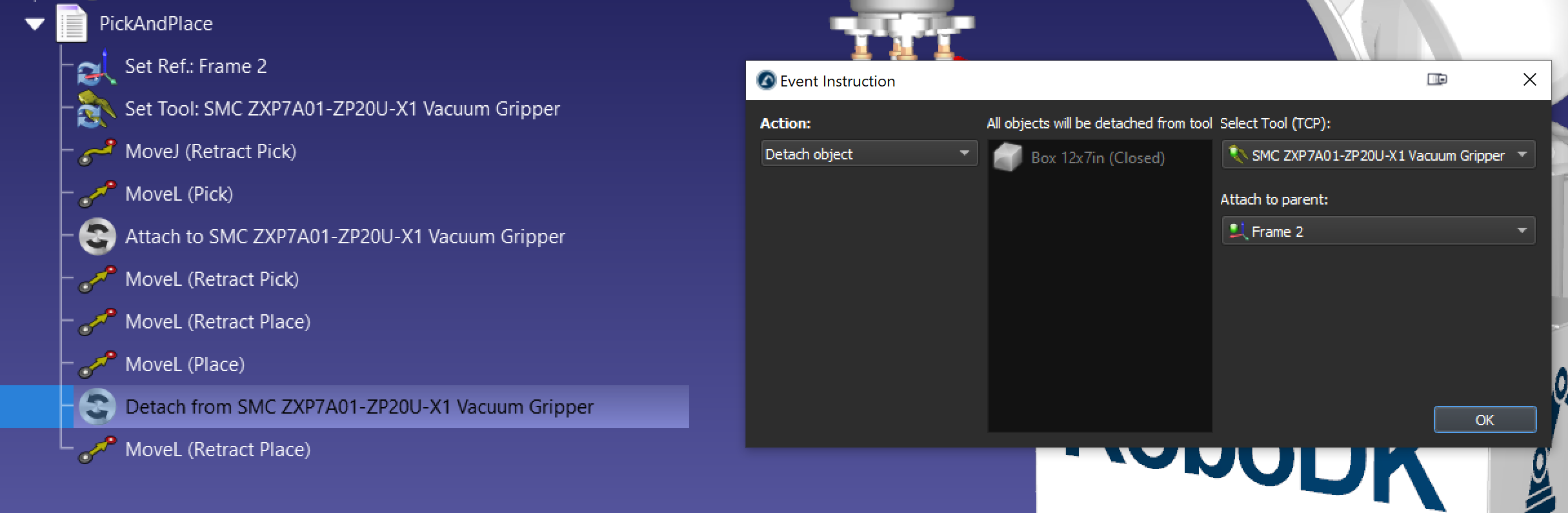
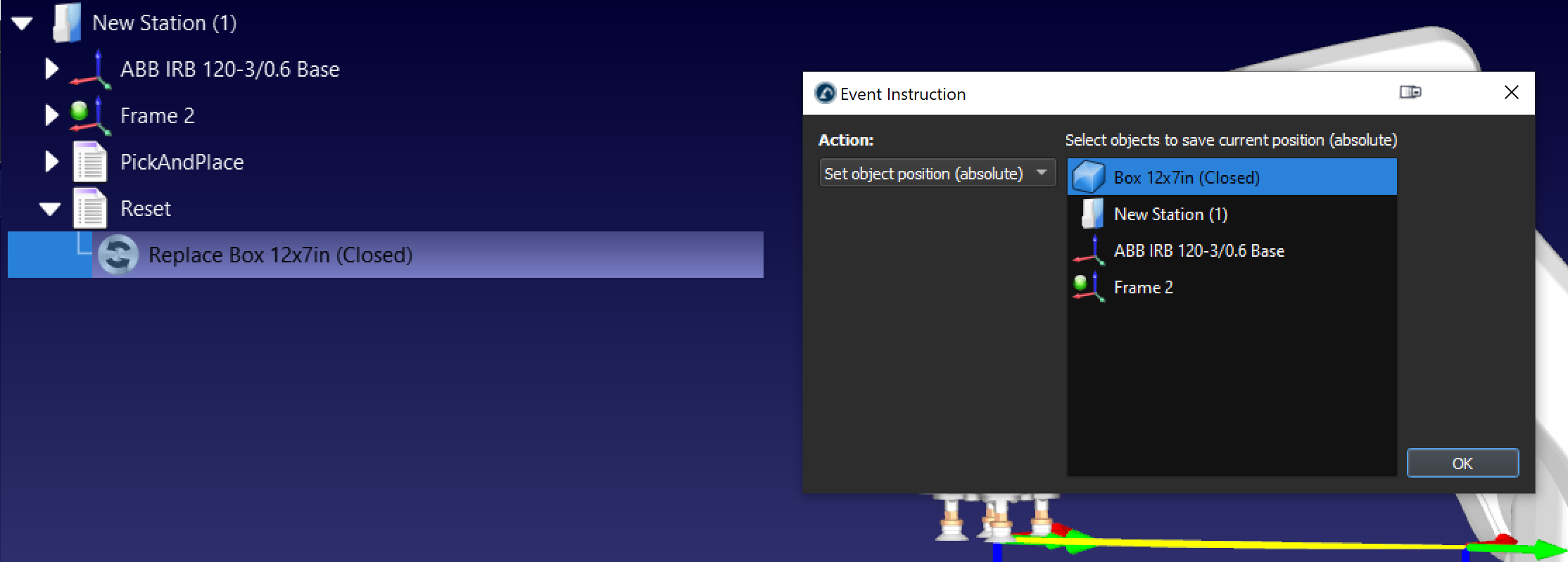
d.必要であれば、イベントアクション Set object position を持つ別のプログラムを作成し、ボックスを原点位置に戻すとよいでしょう。
以下の手順で、RoboDKで基本的なピックアンドプレースステーションを作成することができます。
ピックアンドプレースと組立
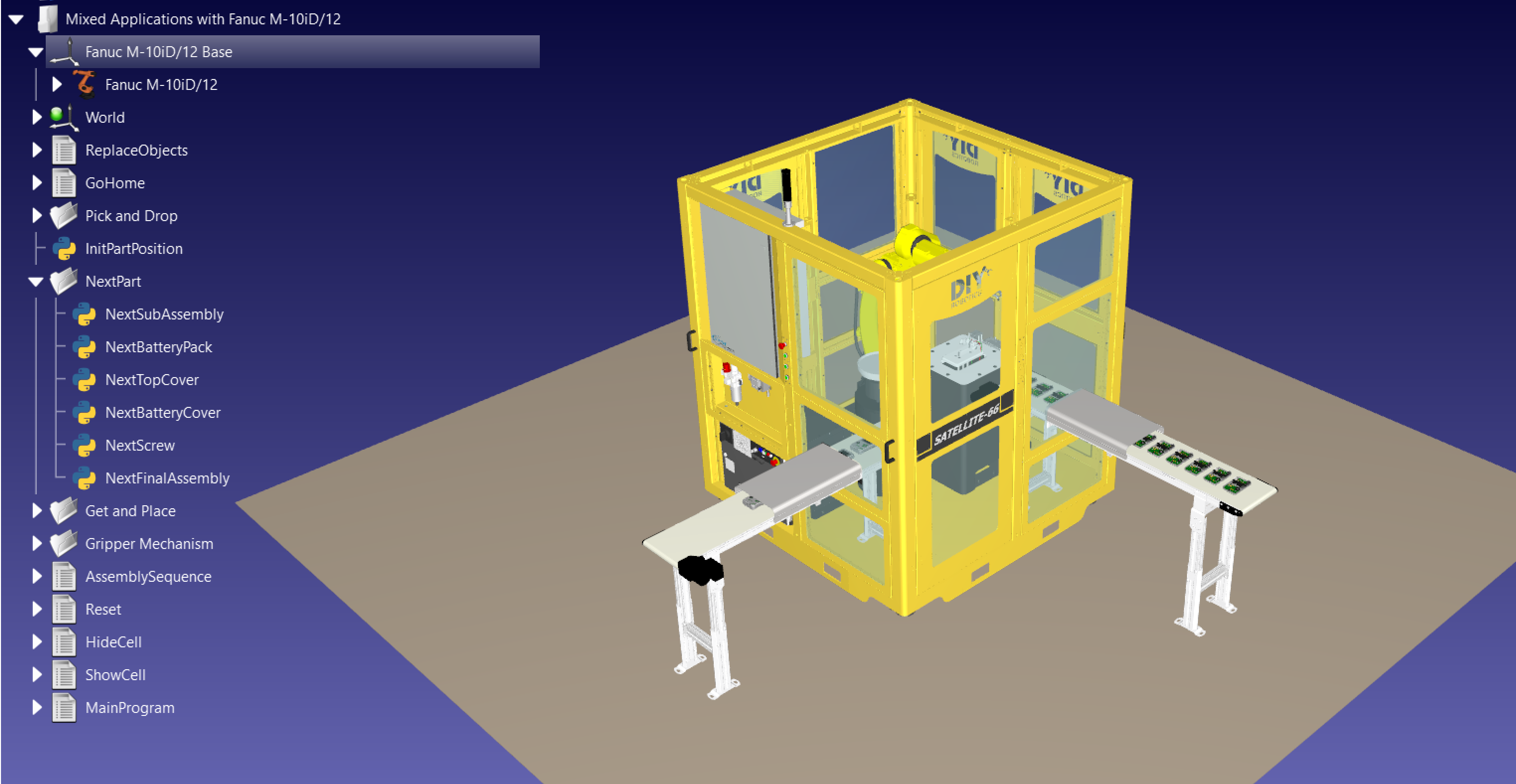
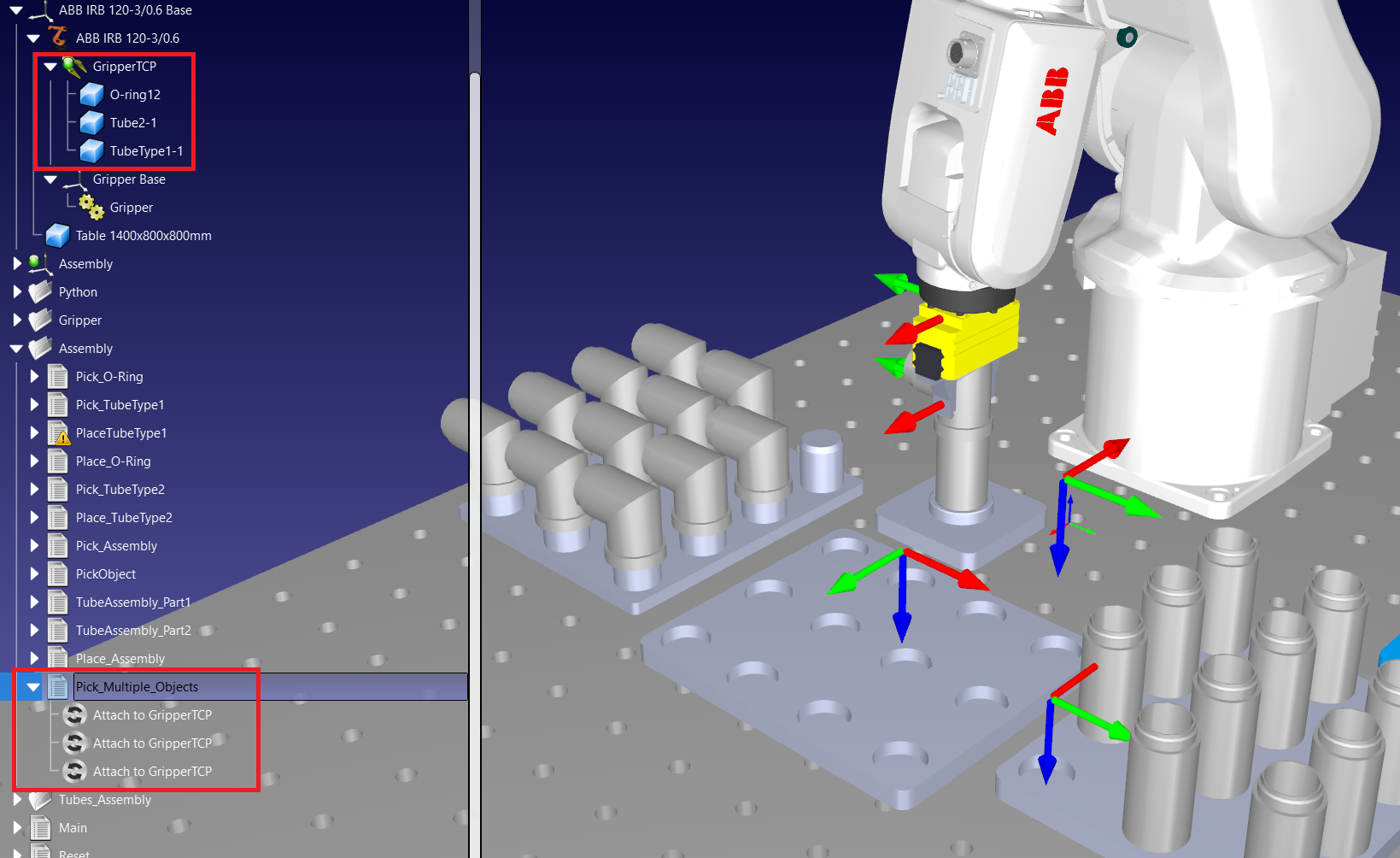
ピックアンドプレースアプリケーションは、アセンブリ作業を自動化するために使用することができます。attach object "イベントを複数回使用することで、一度に複数のオブジェクトをピックアップし、アセンブリピックアップを作成することができます。例えば、アセンブリに3つのオブジェクトがある場合、以下の画像のように3回イベントを使用することができます。
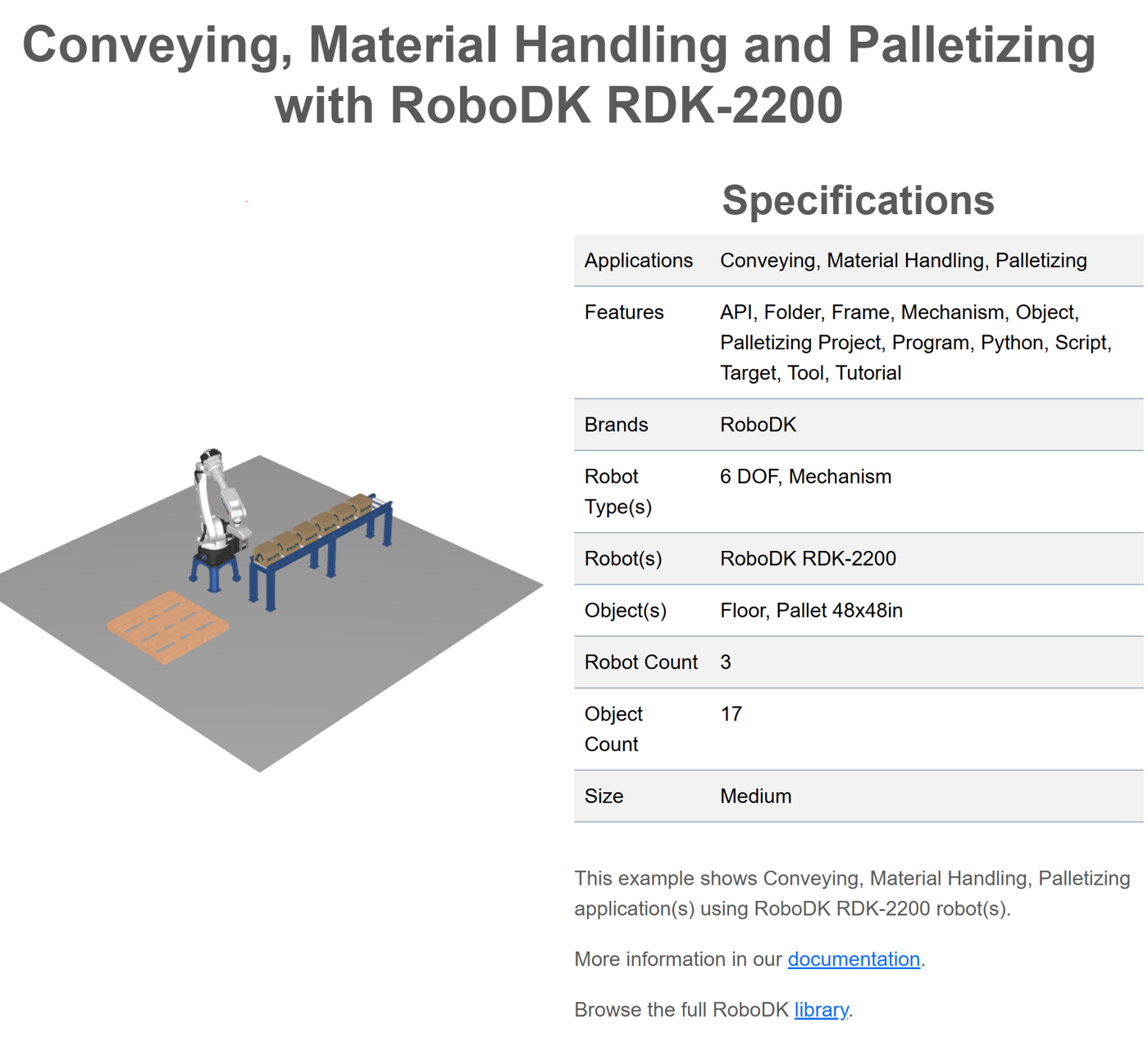
パレタイジングAdd-inを使用したピックアンドプレース
パレタイジングパターンを含むピック&プレース作業を繰り返し行う場合、当社のパレタイジングプラグインを使用することで、作業を簡素化できます。以下のリンクからパレタイジングプラグインをダウンロードしてください:パレタイジング|アドインマーケットプレイス。パレタイジングプラグインの詳細については、パレタイジングのドキュメントをご覧ください。
APIを使ったピック&プレース
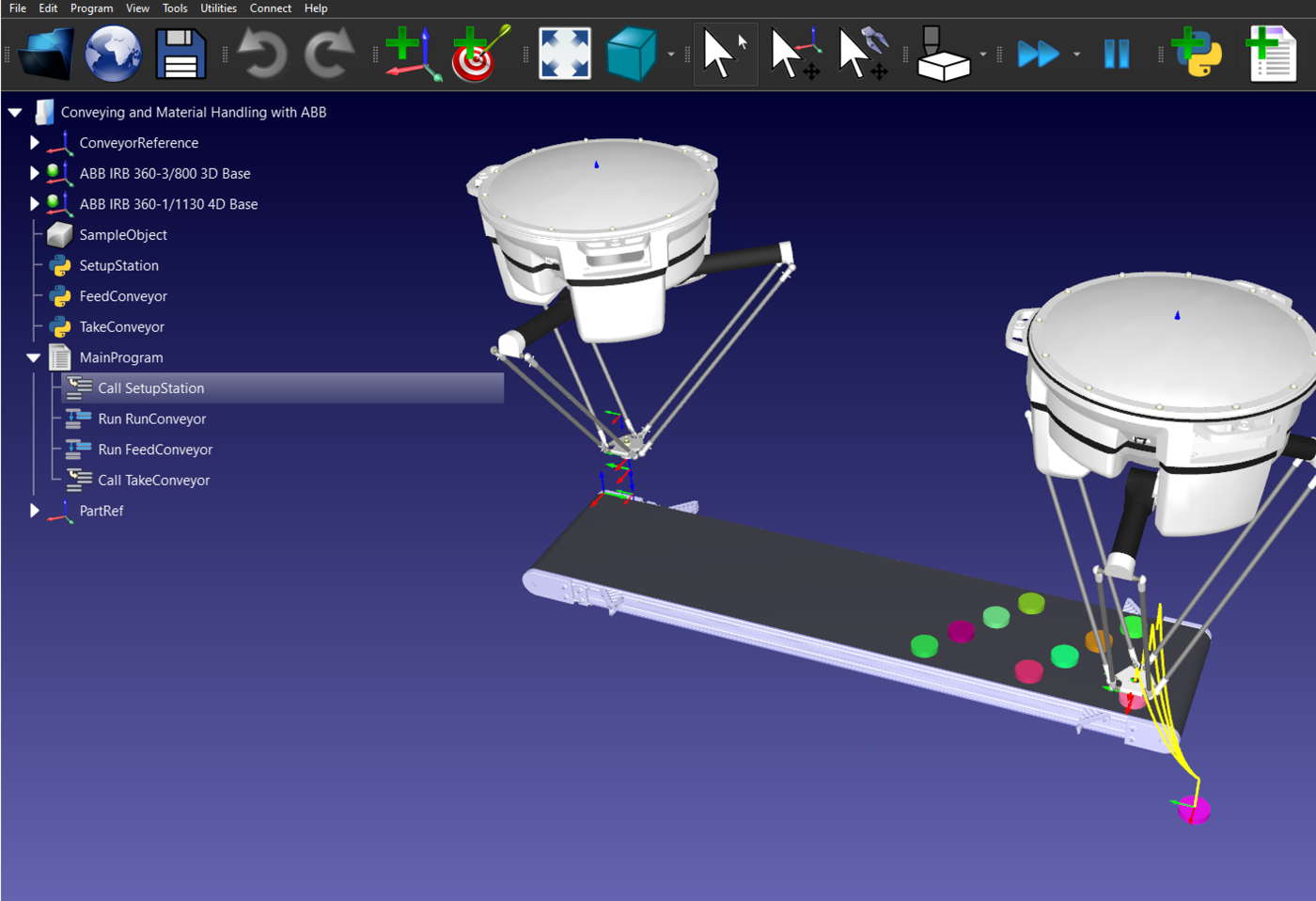
大型アセンブリのピッキングや、移動コンベアからの対象物のピッキングなど、より高度なピック&プレース操作が必要な場合は、APIを使用してピック&プレースアプリケーションをプログラムすることができます。
この例では、RoboDK API と Python を使って、移動するコンベア上にオブジェクトをピック&プレースしています。
ヒント: RoboDK API に関するこちらを詳しい情報はご覧ください。
また、ピックアンドプレース操作を多用し、複数の部品を使用して最終的なアセンブリを作成するこのアセンブリステーションもご覧ください:ファナックM-10iD/12による混合アプリケーション。