RoboDK
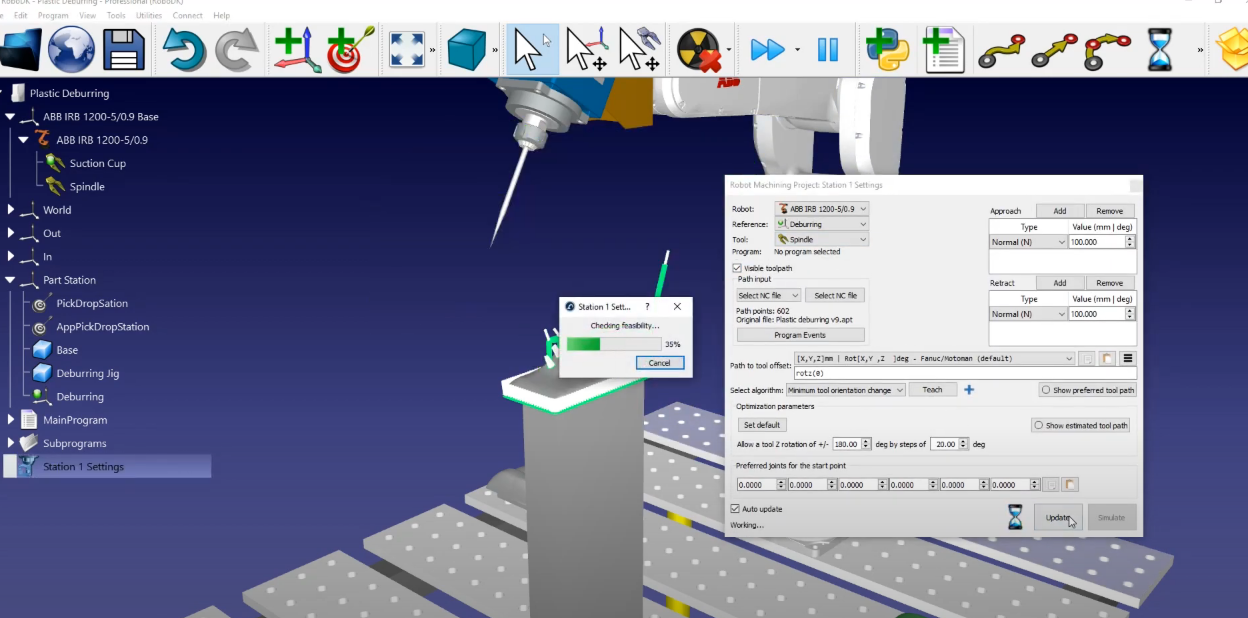
RoboDKでロボットツールパスの準備ができたら、バーチャルロボットセルが実際のセットアップと一致していることを確認します。RoboDKでは、ロボットプログラムを生成する前に、製造作業に正しいツールとリファレンスフレームが使用されていることを確認します。
この例では、リファレンスとしてDeburring、ツールとしてSpindleを選択しています。Update➔ Simulate を選択します。
パスセクションの順番を入れ替えたり、意味を入れ替えたりしたい場合は、以下の手順に従ってください:
1.CAMプロジェクトには通常、アプローチとリトラクトのムーブメントがすでに含まれています:アプローチ "と"リトラクト "から "削除 "を選択します。Updateを選択し、Simulateを選択します。
2.この例では、デフォルトのパラメータで有効な結果が得られます。追加で変更したい設定は、スピンドルの起動と停止だけです:Open Program Events➔ "Path Approach "と"Path Retract "にサブルーチンを追加します。各オプションにチェックを入れ、"Path Approach "に "Spindle (1)"、"Path Retract "に "Spindle (0) "と記述します。これは、スピンドルをアクティブまたは非アクティブにするパラメータを受け取ることができる関数がコントローラに定義されていることを前提としています。
3.更新を選択します。
ここで、作成したプログラム名 "Station 1 "を修正し、"Main Program "を起動します。
最後に行うべきことは、ロボットプログラムの生成です。ABBのロボットを使用しているので、ABB独自のRAPIDプログラミング言語を使用するABBロボットコントローラ用のMODファイルをエクスポートする必要があります。
1.正しいポストプロセッサを使用していることを確認してください:Select Station➔ Select Post Processor➔ ABB RAPID IRC 5.
2.Station1 のプログラムを右クリックし、Generate Robot Program を選択します。
自動的にロボットプログラムがテキストエディタで表示されるはずです。ABBロボットコントローラが要求する特定の動作コマンドと構文をすべて見ることができます。