Deburring
イントロダクション
ロボットによるプラスチックバリ取りは、ロボットアームがプラスチック成形部品から余分な材料を取り除きます。この例では、RoboDK でプロジェクトを作成し、ロボットシミュレーションとオフラインプログラミングを行います。この例では、Fusion 360 プラグインを使用して RoboDK でツールパスを生成する方法も紹介します。
ビデオAutodesk Fusion 360 用 RoboDK Add-In を使用した ABB ロボットによるプラスチックバリ取り: https://www.youtube.com/watch?v=HaMICaEjaAk
Fusion 360 用 RoboDK プラグインを使用すると、加工プロジェクトを簡単に作成し、生成されたパスを RoboDK 内に自動的にエクスポートすることができます。SolidWorksで作成した3DモデルをRoboDKに簡単に読み込むことができます。RoboDKアドインを使用すると、Fusion 360から直接、あらゆる製造用途のロボットアームをプログラムすることができます。
ヒントFusion 360 用 RoboDK Add-in については、 Fusion 360 用 RoboDK Add-in をご覧ください。
プラスチックバリ取り事例
プロジェクトを開始するには、まずRoboDKのプラスチックバリ取りのサンプルをデフォルトライブラリから選択する必要があります。
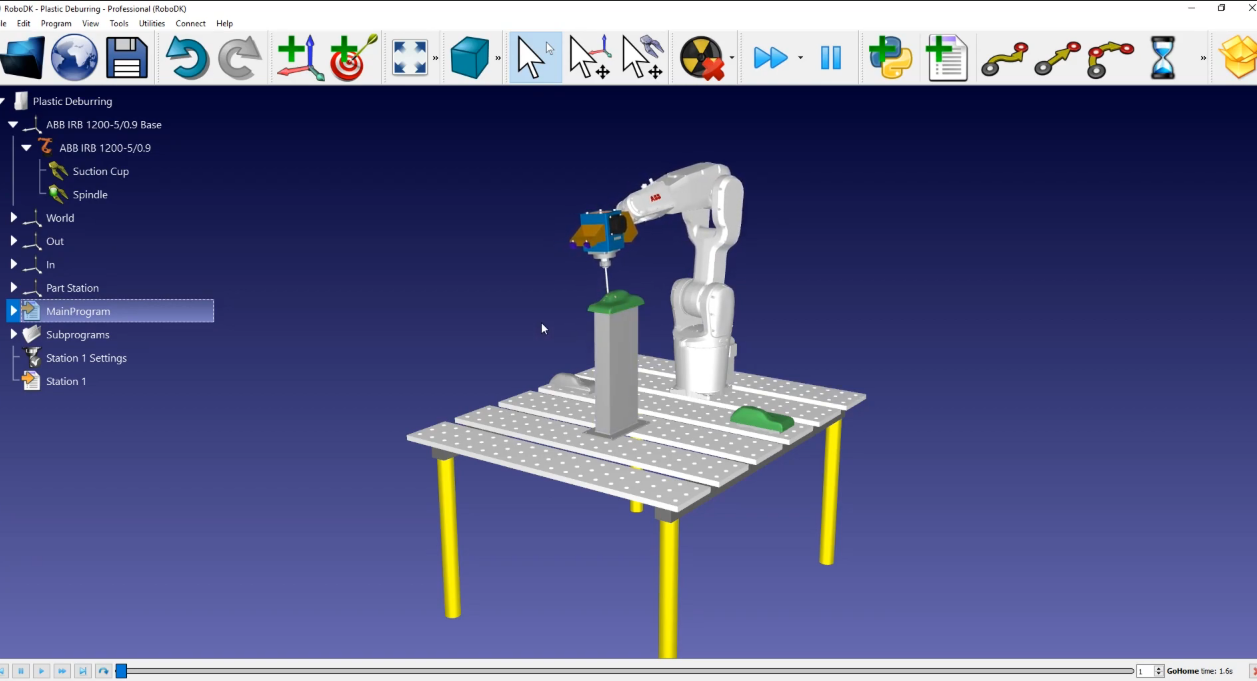
セットアップ
この例ではシンプルなセットアップを使用しています:テーブルの上に設置されたロボット(この例ではABBのロボットを使用しています)、成形されたばかりの部品を置く山、加工された部品を置く山、そして部品を固定するための真ん中の治具です
ヒント この、RoboDKでロボットステーションを作成する方法を順を追って学んでください。
ステーションをロードします:
1.File ➔
2.RoboDKのサンプルセクションからPlastic Deburringのサンプルを探します:
C:/RoboDK/Examples/Plugin-Fusion360-Plastic-Deburring.rdk.
ステーションをロードしたら、Fusion 360を開きます。
Fusion 360からの2Dスケッチ
Fusion 360でオブジェクトを開きます。この例では、オブジェクトはプラスチック部品です。このプロジェクトの目的は、3つの穴の余分なマテリアルを除去することと、パーツの底に近い部分全体の余分なマテリアルを除去することです。
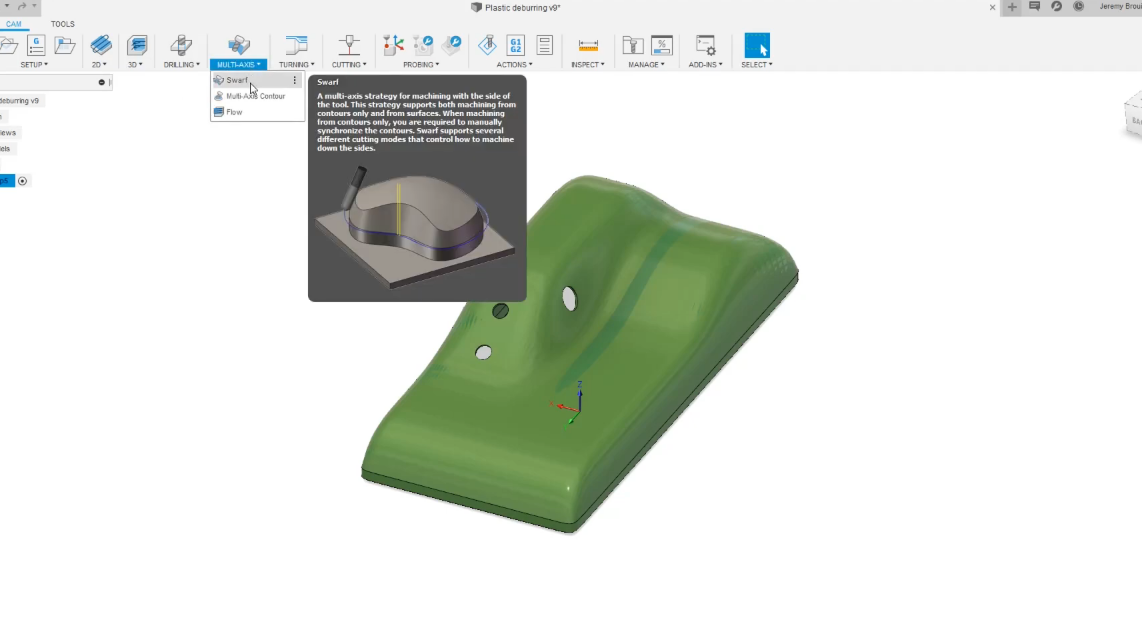
まず、Fusionの "Manufacturing "ワークスペース・タブにいることを確認してください。以下の手順に従って、ツールパスを作成します:
1.多軸]を選択し、[切り粉]ツールを選択します。
2.使用するツールを選択し(この例ではRoboDKステーションのカスタムツールを使用します)、穴を選択して最初のパスを作成します。
3.サーフェスの右側にツールパスを作成するには、Machine Other Sideを選択し、Okを選択します。各穴に対してこの手順を実行します。
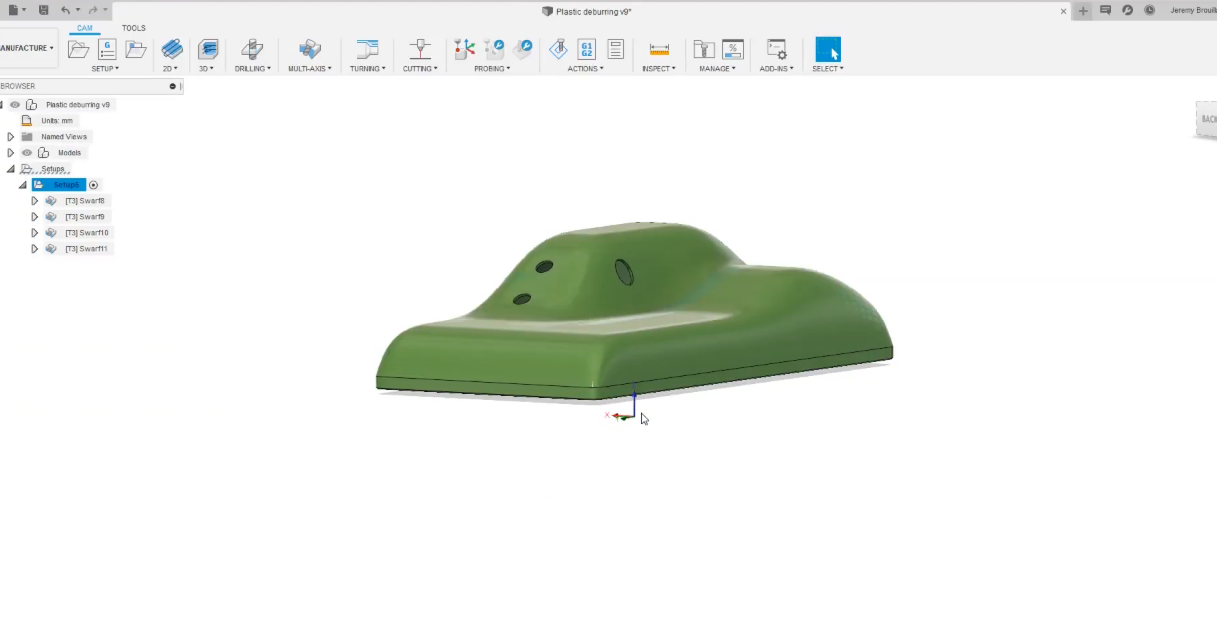
4.同じことを下の部分に行うには、スワーフツールを選択し、下の部分を選択します。
5.計算が終わったら、作成したパスをシミュレーションします:セットアップを選択し、シミュレーションを選択します。
これでロボットのツールパスは完成です。RoboDKに戻って、「バリ取り」参照フレームが有効になっていることを確認する必要があります。そのためには
RoboDKに入り、デバリングを選択し、リファレンスフレームの有効化を選択します。
デバリング参照フレームがアクティブになったので、プログラムはその参照フレームを基準にエクスポートされます:
以下の手順でスケッチをRoboDKに読み込みます:
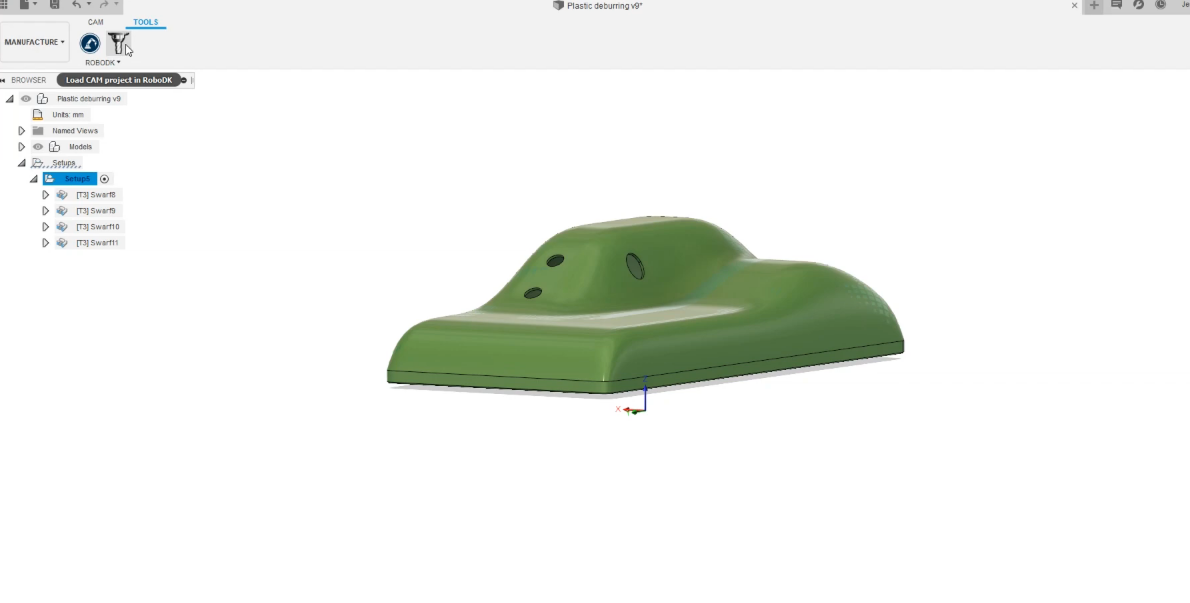
1.Fusion 360にはRoboDKプラグインがあります。RoboDKでCAMプロジェクトを読み込むを選択するだけです。
2.RoboDKに戻ると、その場所に切削パスがあります。Plastic Deburring」という「Machining Project」が作成されています:Deburringを選択し、Visibleを選択します。
3.切削ツールパスの名前を "Station1 Settings "に変更します:Plastic Deburringを右クリックして名前を変更します。
RoboDKステーション
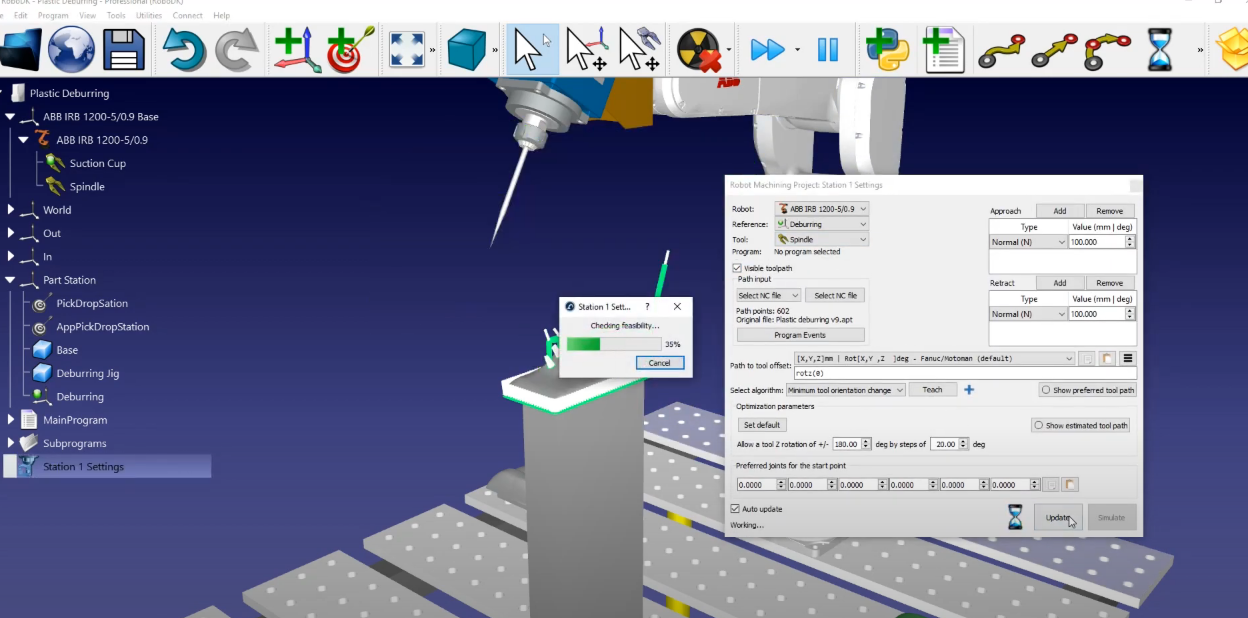
RoboDKでロボットツールパスの準備ができたら、バーチャルロボットセルが実際のセットアップと一致していることを確認します。RoboDKでは、ロボットプログラムを生成する前に、製造作業に正しいツールとリファレンスフレームが使用されていることを確認します。
この例では、リファレンスとしてDeburring、ツールとしてSpindleを選択しています。Update➔ Simulate を選択します。
パスセクションの順番を入れ替えたり、意味を入れ替えたりしたい場合は、以下の手順に従ってください:
1.CAMプロジェクトには通常、アプローチとリトラクトのムーブメントがすでに含まれています:アプローチ "と"リトラクト "から "削除 "を選択します。Updateを選択し、Simulateを選択します。
2.この例では、デフォルトのパラメータで有効な結果が得られます。追加で変更したい設定は、スピンドルの起動と停止だけです:Open Program Events➔ "Path Approach "と"Path Retract "にサブルーチンを追加します。各オプションにチェックを入れ、"Path Approach "に "Spindle (1)"、"Path Retract "に "Spindle (0) "と記述します。これは、スピンドルをアクティブまたは非アクティブにするパラメータを受け取ることができる関数がコントローラに定義されていることを前提としています。
3.更新を選択します。
ここで、作成したプログラム名 "Station 1 "を修正し、"Main Program "を起動します。
最後に行うべきことは、ロボットプログラムの生成です。ABBのロボットを使用しているので、ABB独自のRAPIDプログラミング言語を使用するABBロボットコントローラ用のMODファイルをエクスポートする必要があります。
1.正しいポストプロセッサを使用していることを確認してください:Select Station➔ Select Post Processor➔ ABB RAPID IRC 5.
2.Station1 のプログラムを右クリックし、Generate Robot Program を選択します。
自動的にロボットプログラムがテキストエディタで表示されるはずです。ABBロボットコントローラが要求する特定の動作コマンドと構文をすべて見ることができます。