Inventor
Inventor で 3D オブジェクトを開きます。この例では、3Dオブジェクトは、研磨が必要な湾曲した外面を持つカヌーです。
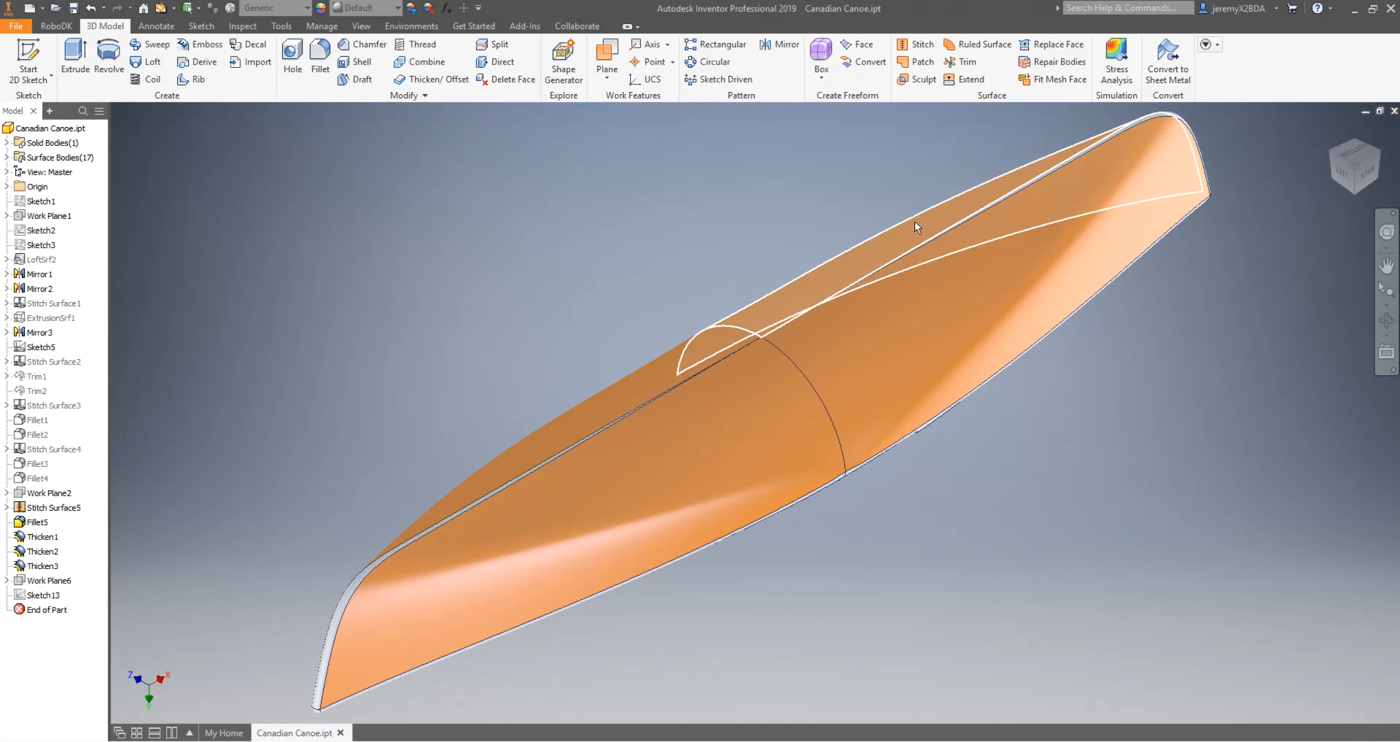
このプロジェクトの目標は、曲面上の研磨パスを作成してインポートすることです。パスはパーツの最初のセクションを研磨するための上下運動となります
45度の角度で平面を作成し、その平面にパスを描き、曲線投影ツールを使って曲面にパスを投影する必要があります。
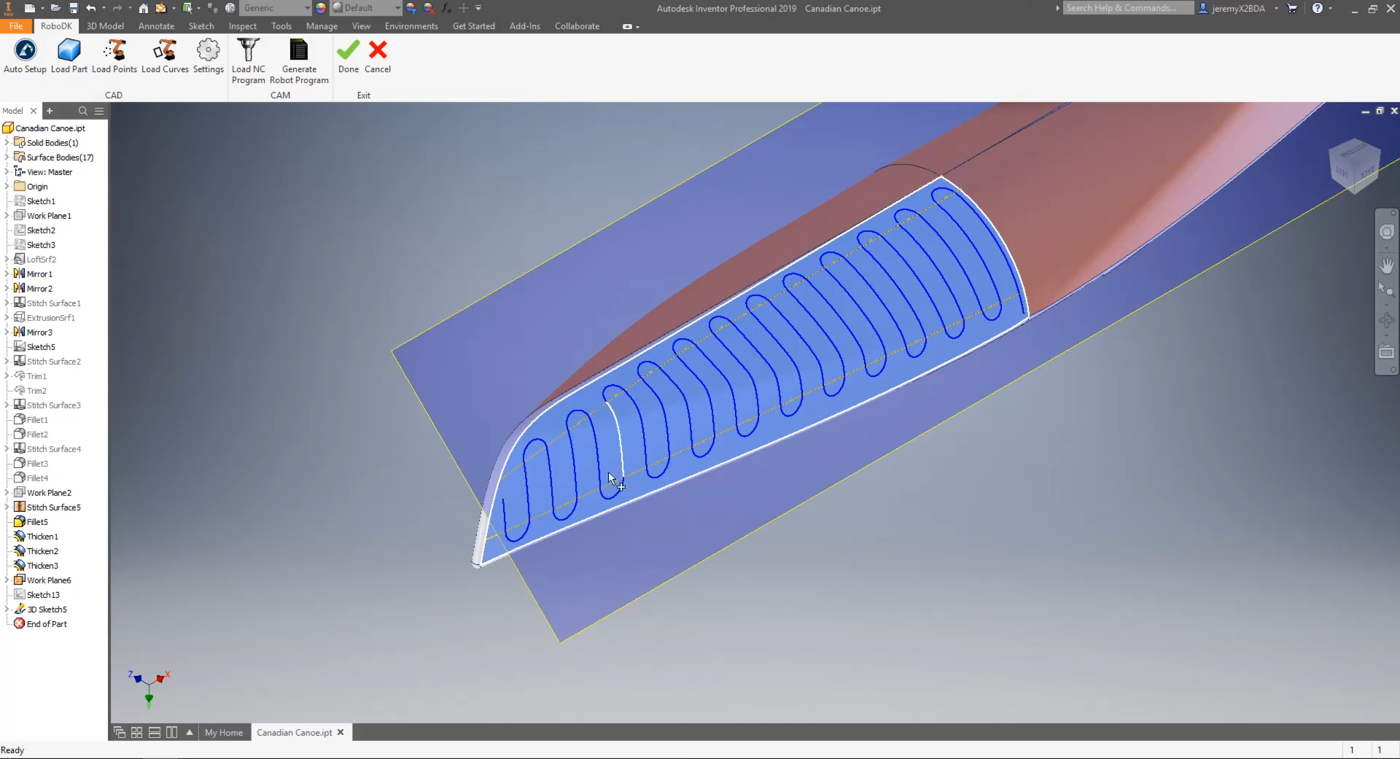
この例ではRoboDKがすでにパスを描いています。下図に示すように、左側のメニューから Sketch13➔ Visibility を右クリックすることで表示させることができます。
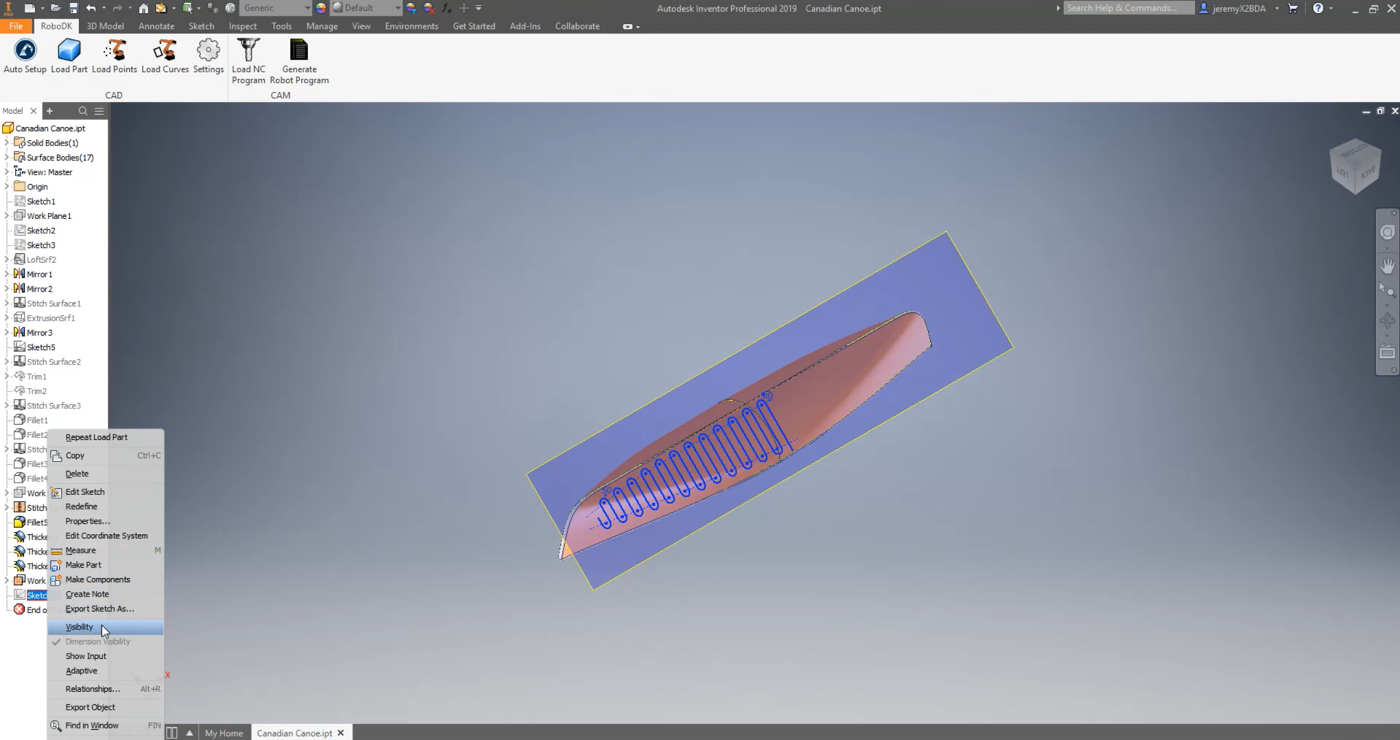
ご覧のように、パスは最初に選択されたセクションを全てカバーしています。Sketch13➔ Edit Sketch を右クリックして、スケッチを再度開き、必要であればパスを修正することができます。
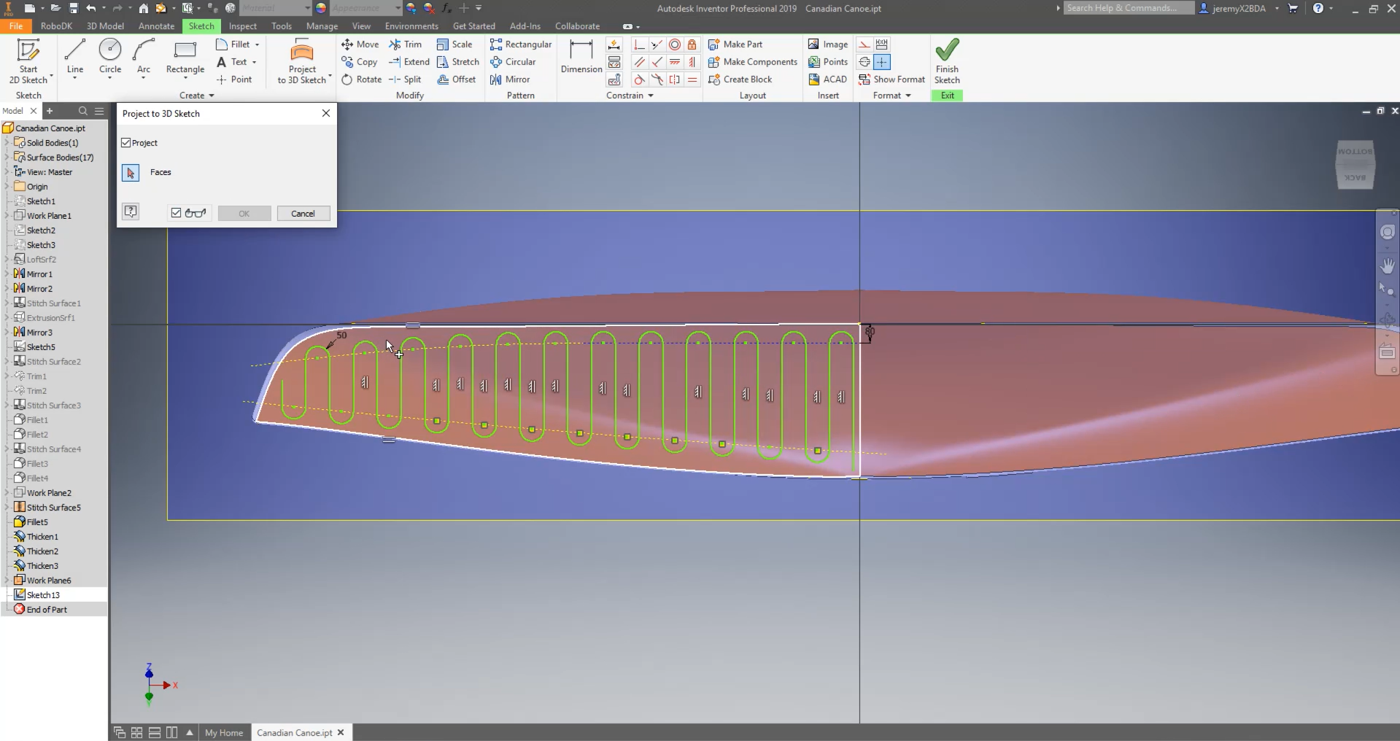
あとは、Inventorツールを使ってサーフェス上にパスを投影するだけです:
1.Inventor の [Sketch] タブを選択し、[Project to 3D Sketch] を選択します。
2.パスを投影したいサーフェスを選択します。
3.OKを選択し、スケッチを終了します。
これらの変更を受け入れるとすぐに、3Dスケッチが作成されます。
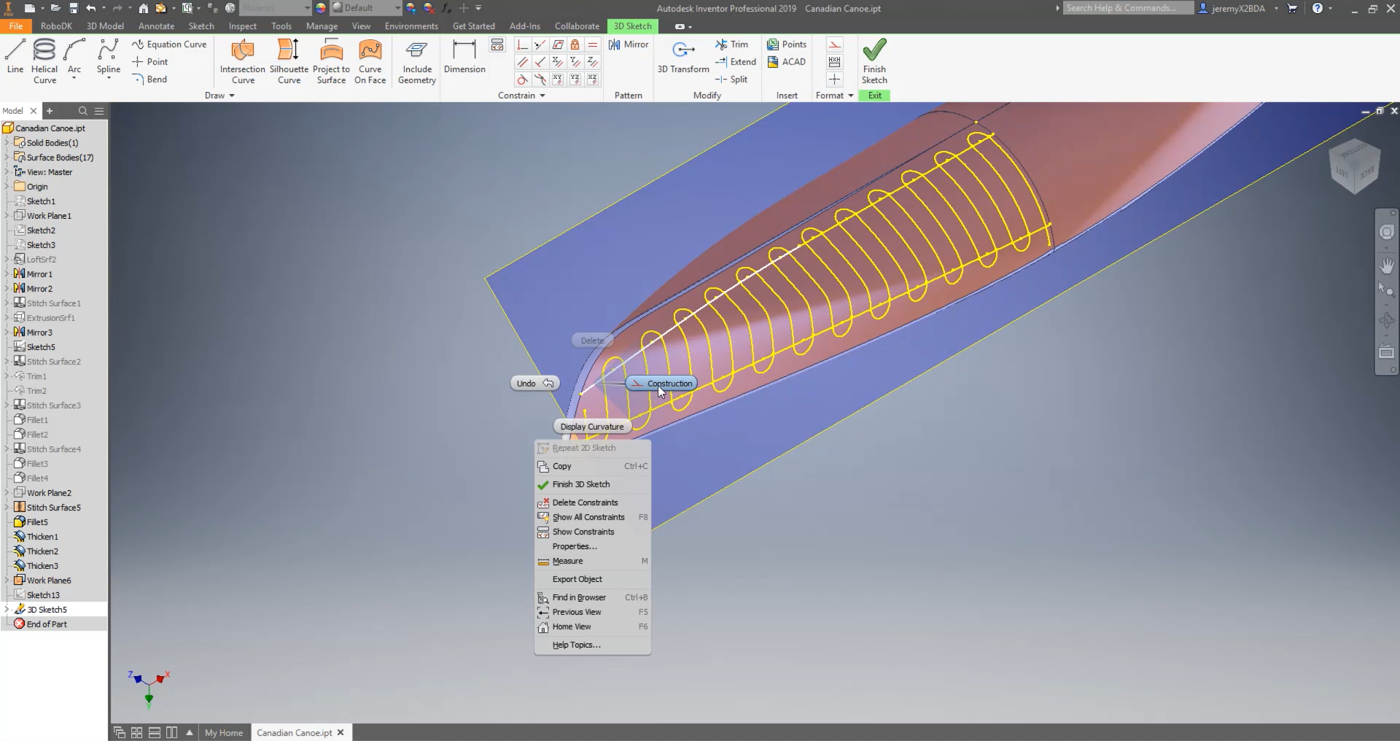
作成されたコンストラクションラインがコンストラクションラインとして正しく定義されていることを確認してください:
1.Sketch13➔ Visibility を右クリックして、パスを可視化します。
2.Sketch13➔を右クリックし、3D スケッチを編集します。
3.3Dモデル上でチェックしたいラインを選択します。
4.建設を選択します。
5.スケッチを仕上げるを選択します。
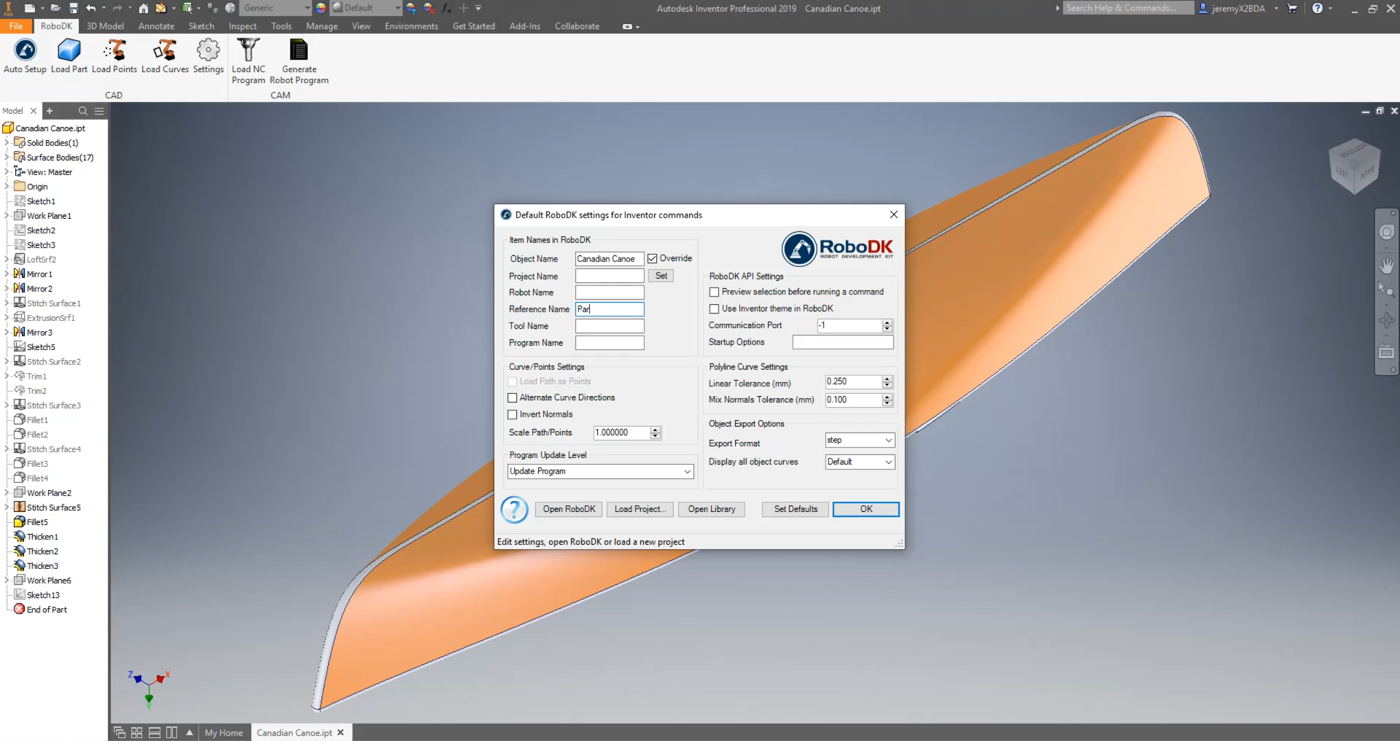
次の手順に従ってスケッチをRoboDKに読み込みます:
1.Inventor のRoboDK タブを選択し、
2.オブジェクト名を入力します。この場合は「カナディアンカヌー」です。
3.部品をインポートする参照名を入力します。この例ではPartです。参照名を入力しない場合は、アクティブ化された参照フレームが使用されます。アクティブな参照フレームがない場合は、新しい参照フレームが自動的に作成されます。
4.設定]ウィンドウを閉じるか、[OK]を選択します。
5.
6.スケッチのすべての線と上面を選択し、OKを押します。このステップはRoboDKにサーフェスの法線を計算するのに必要な情報を与え、曲面上の研磨ツールの向きを計算するのに重要です。
7.
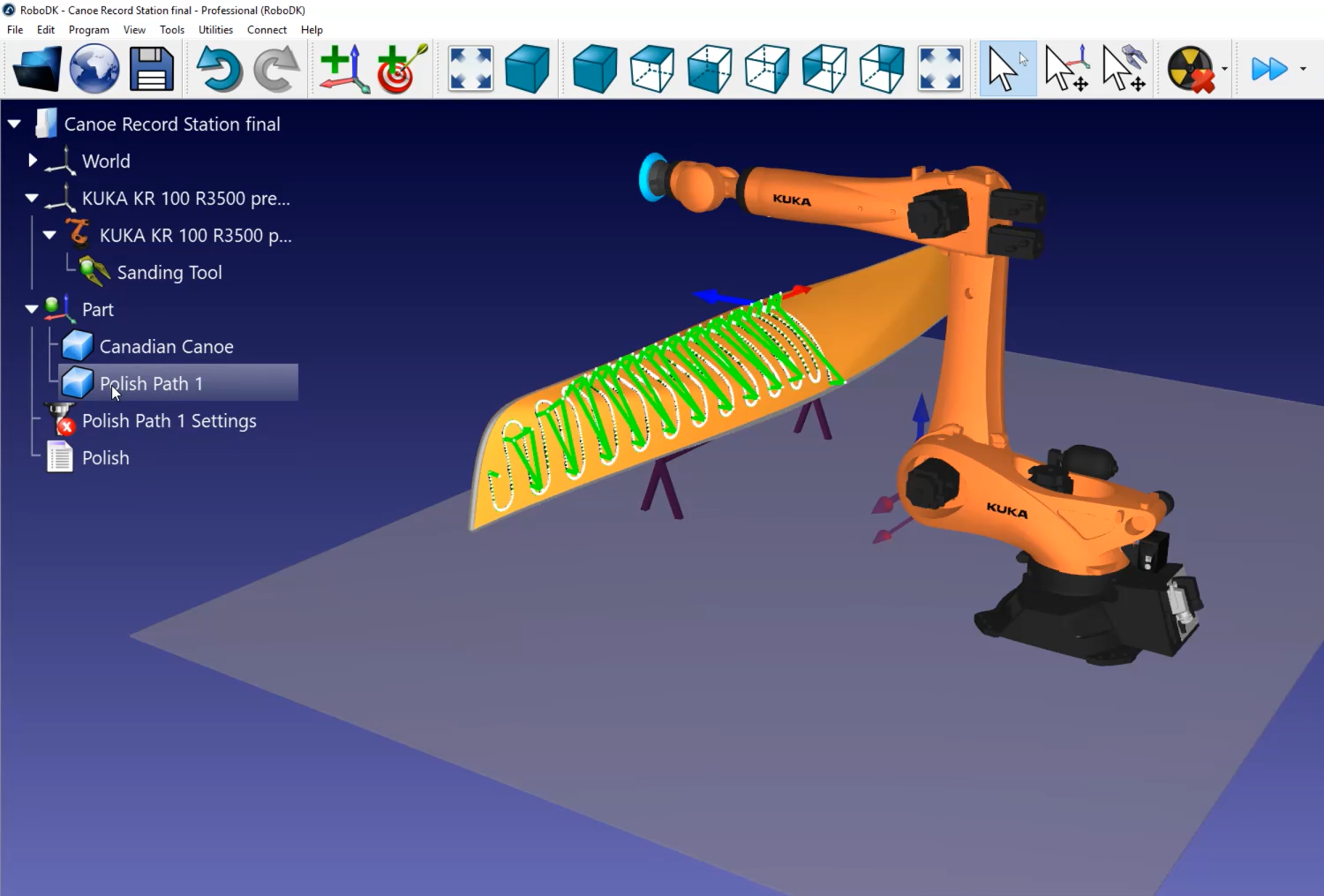
RoboDKのアクティブな参照フレーム(Part)上に、パーツ(Canadian Canoe)とパス(Polish Path 1)がロードされているはずです。