RoboDK

注意: このプロジェクトのように複雑なプロジェクトの場合、"auto update "オプションのチェックを外すことをお勧めします。更新ボタンを使って手動で更新できます。
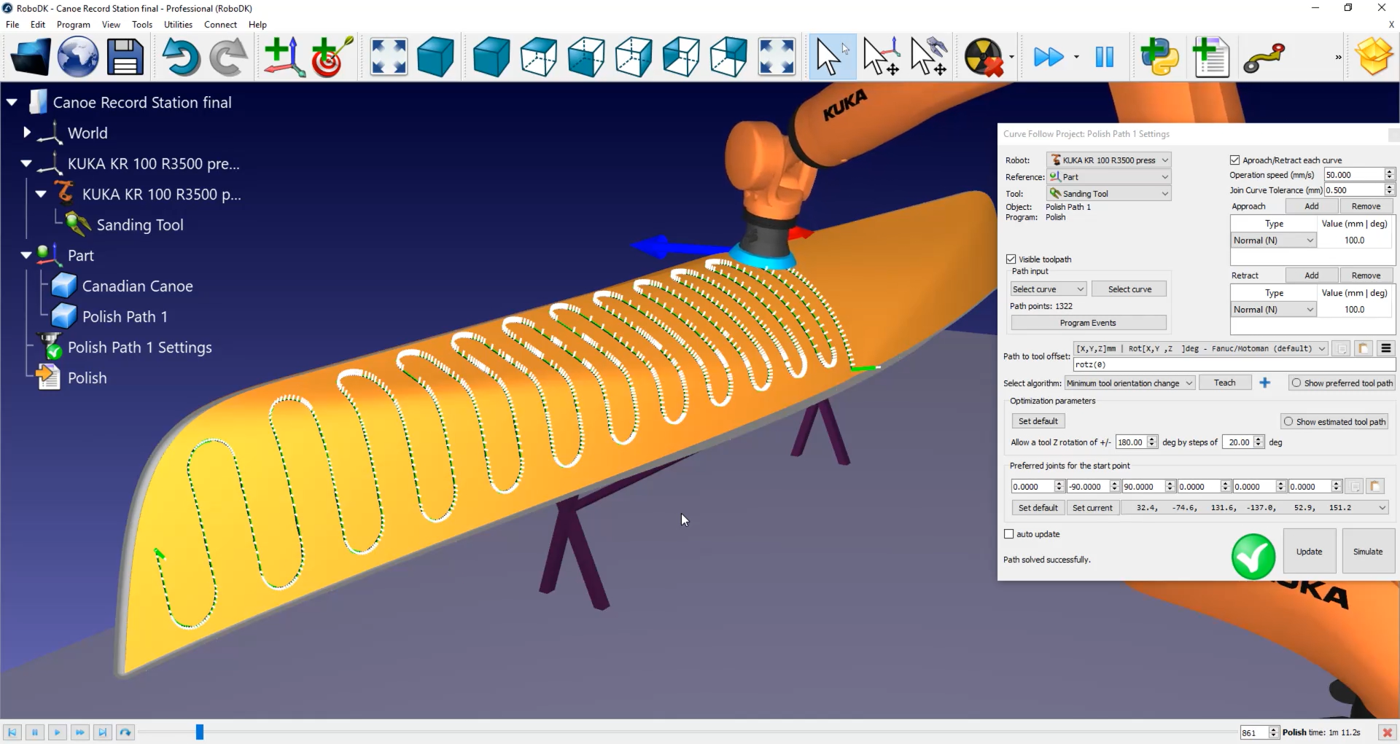
カヌーのパスから小さな白い線が出ているのがわかります。これはサーフェスの法線です。この例では、すべて正しくインポートされているようです。
以下の手順に従って、パスの方向を設定してください:
1.
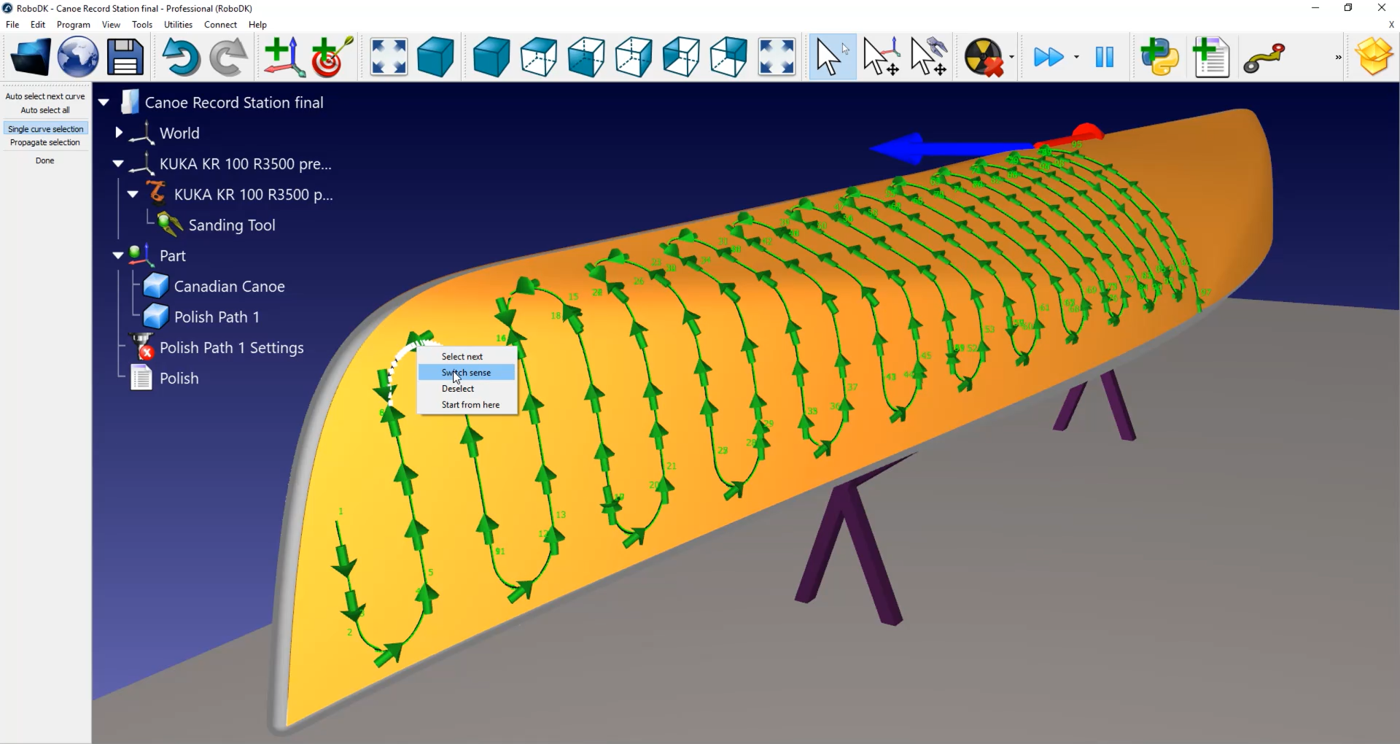
2.カーブの選択]をクリックします。
これで、パスセグメントが実行される順番と方向がわかります。方向を変えたい場合は、右クリックして、Switch sense を選択してください。
この場合、パスをやり直す必要があります:
1.ステーションの何もない場所(青い背景など)を右クリックします。
2.選択をリセットを選択します。
3.開始したい線を選択します。正しい方向に向いていることを確認してください。
4.画面の左上にある「すべてを自動選択」ツールを選択します。
5.完了を選択します。
注意:デフォルトでは、進路に対して100ミリのアプローチとリトラクトがあります。つまり、ロボットが降りてきて経路を開始します。しかし、
また、
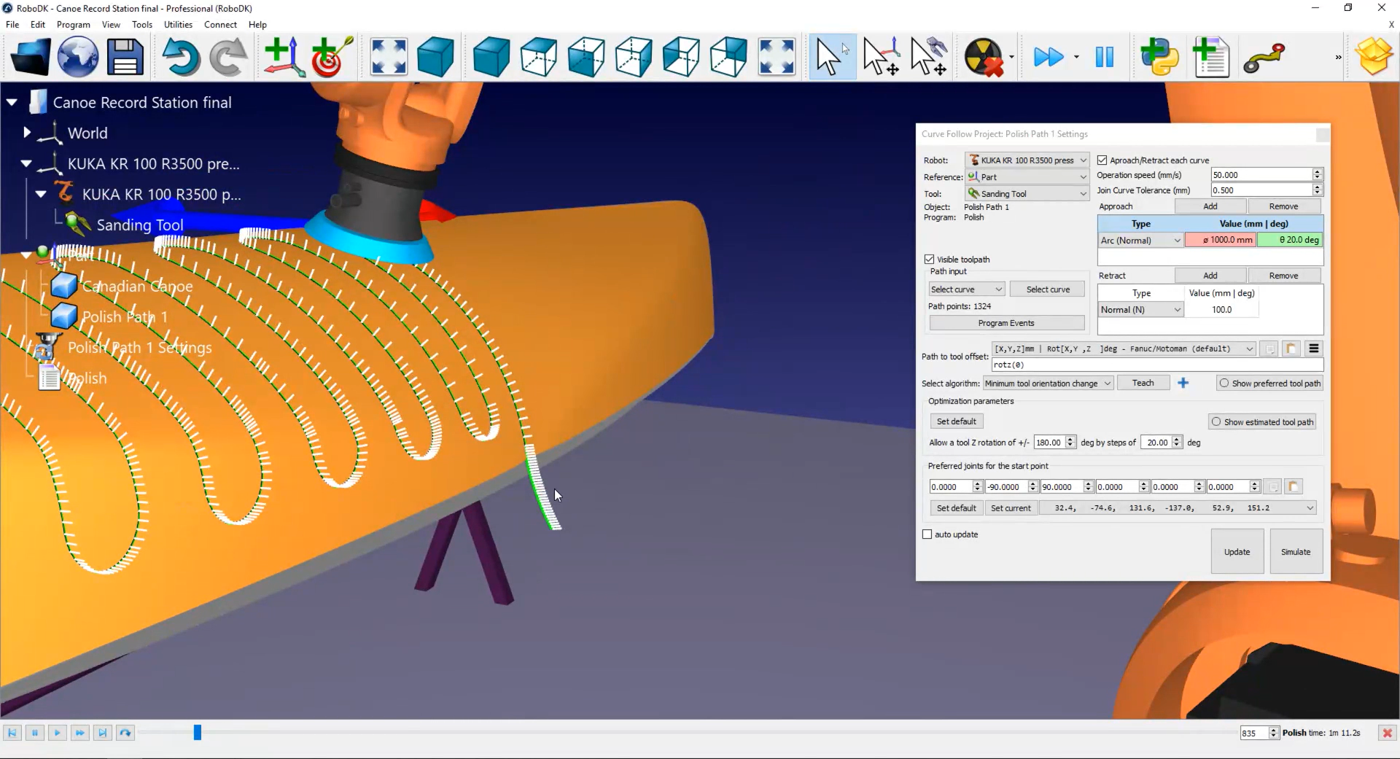
このメニューでは、Set Rounding オプションを有効にすることもできます。デフォルトでは、パスに沿ったすべての白線は、ロボットが停止する必要があるポイントとしてロボットコントローラに送信されます。研磨やサンディングのアプリケーションでは、これは最良の動作ではありません。
Set Roundingチェックボックスをにして、コントローラの連続移動オプションを有効にします。ロボットのブランドによって、このオプションの名前は「丸め」、「一定移動」、「ゾーンデータ」となります。この例では、値は0.5mmになります。
ヒント: このメニュー
ヒント: 操作速度を変更することで研磨速度を変更できます。
この例では、KUKAロボットを使用しているので、ロボットプログラムを生成するときにSRCファイルを取得します。このファイルはKUKA KRCコントローラで読むことができます。
以下の手順に従ってロボットプログラムを作成してください:
1.
2.OKを選択します。
3.