Polishing
はじめに
このセクションでは、ロボットのシミュレーションとオフラインプログラミングのための基本的なプロジェクトを RoboDK で作成する方法について説明します。この例では、InventorとRoboDKを使用して、KUKAロボットのシミュレーションとプログラミングを行います。Inventorで3Dスケッチを作成し、RoboDKにインポートすることで、曲面上の実際のロボットパスを生成する方法を学びます。
ビデオInventorによる研磨アプリケーションのロボットプログラミングhttps://youtu.be/N4aujsuiqy4。
Autodesk Inventor 用 RoboDK プラグインを使用すると、Inventor で作成した 3D モデルを RoboDK に簡単に読み込むことができます。このプラグインを使用すると、Inventorから直接、50社以上のロボットメーカー、500台以上のロボットをプログラミングすることができます。
Autodesk Inventor 用 RoboDK アドインは Inventor 2018 以降で動作します。RoboDK Inventor Add-In は RoboDK のライセンスをお持ちであれば無料でご利用いただけます。
ヒントInventor 用 RoboDK アドインについては、Inventor 用 RoboDK アドインのセクションを参照してください。
研磨例
このセクションでは、KUKAロボットを研磨に使用する方法をご紹介します。
セットアップ
プロジェクトを開始するには、まずデフォルトライブラリにあるRoboDKの研磨サンプルを選択する必要があります。
ヒント この、RoboDKでロボットステーションを作成する方法を順を追って学んでください。
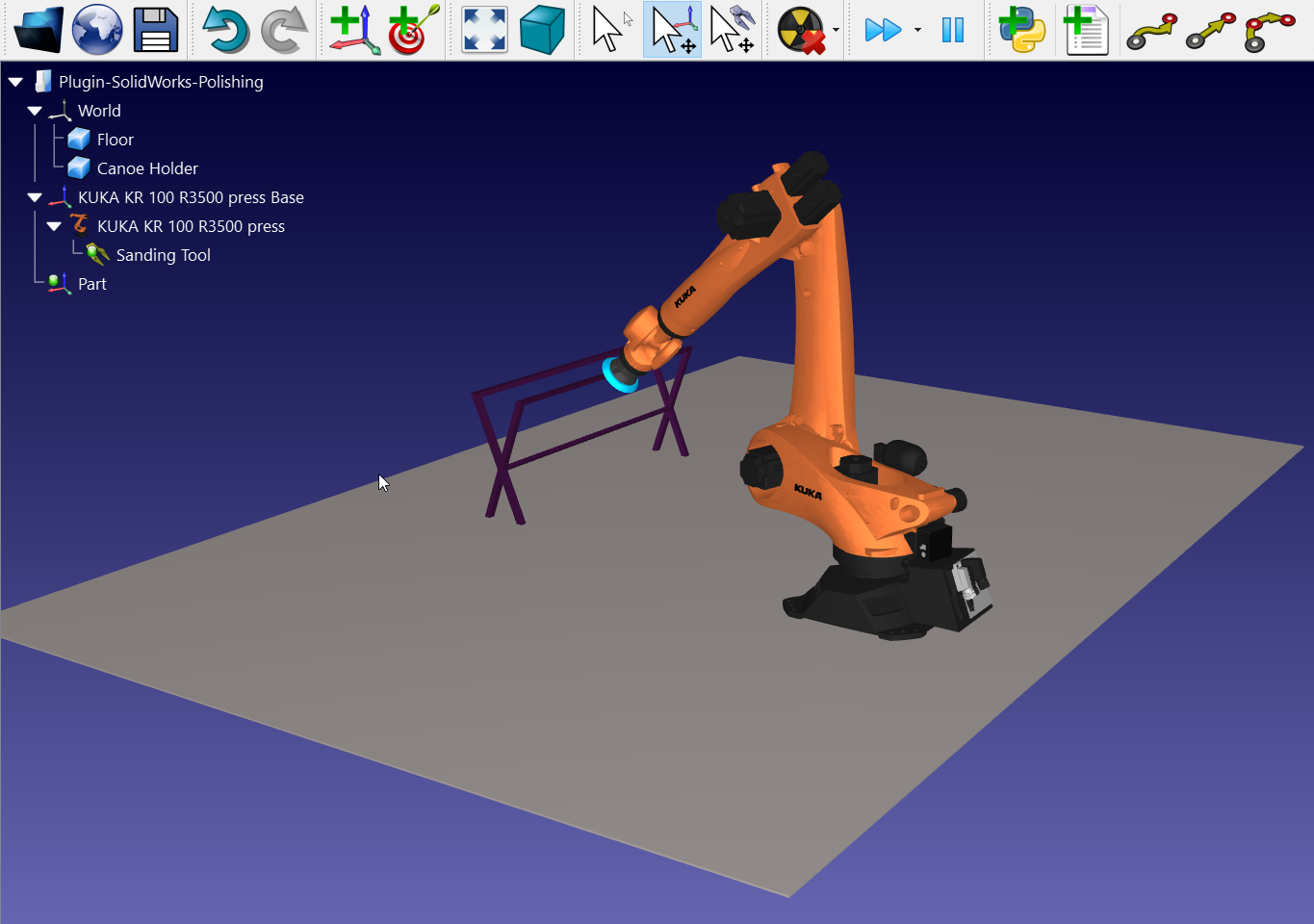
この例では、KUKAロボット、回転研磨ツール、部品(カヌー)、カヌーを載せる金属製の台が含まれます。
プロジェクトを開いてください:
1.File ➔
2.RoboDKのサンプルセクションからPolishingのサンプルを探します:
C:/RoboDK/Examples/Plugin-Inventor-Polishing.rdk.
ステーションをロードしたら、Inventor を開きます。
Inventorの3Dスケッチ
Inventor で 3D オブジェクトを開きます。この例では、3Dオブジェクトは、研磨が必要な湾曲した外面を持つカヌーです。
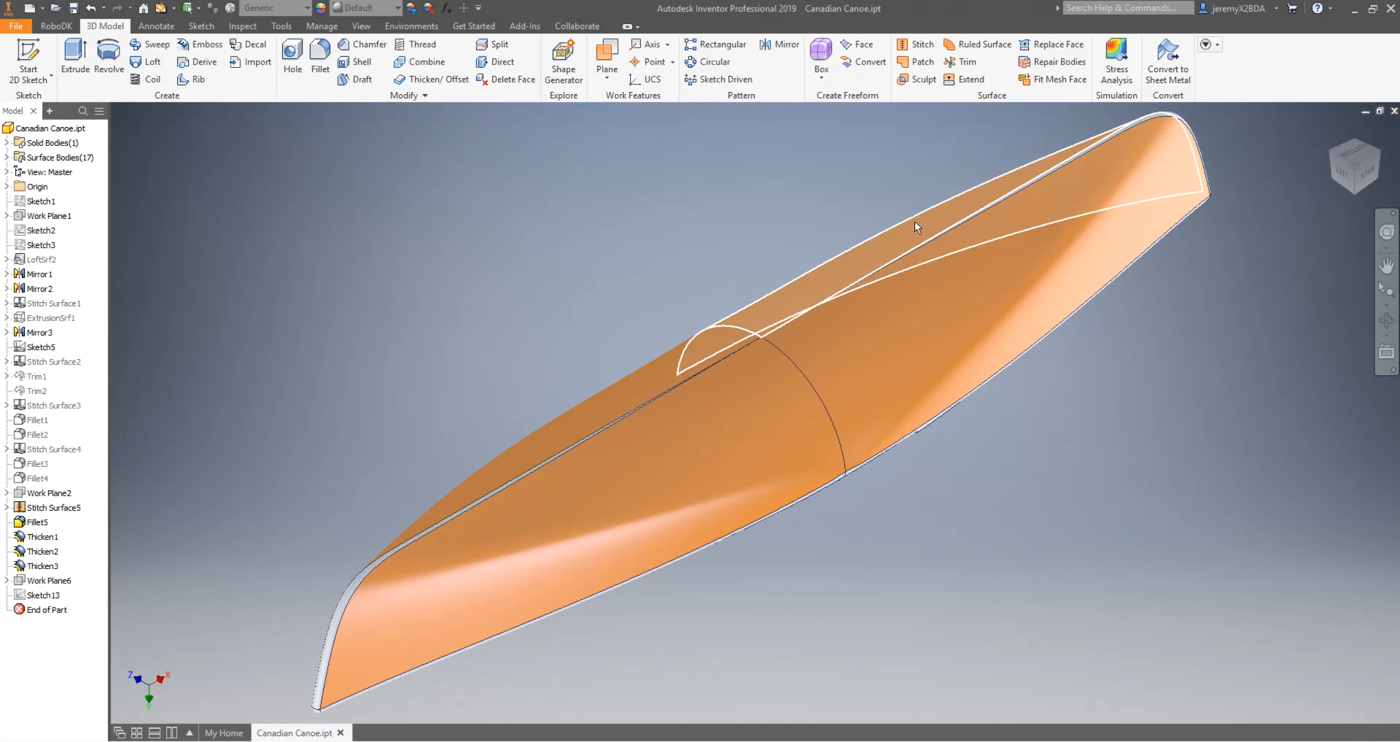
このプロジェクトの目標は、曲面上の研磨パスを作成してインポートすることです。パスはパーツの最初のセクションを研磨するための上下運動となります
45度の角度で平面を作成し、その平面にパスを描き、曲線投影ツールを使って曲面にパスを投影する必要があります。
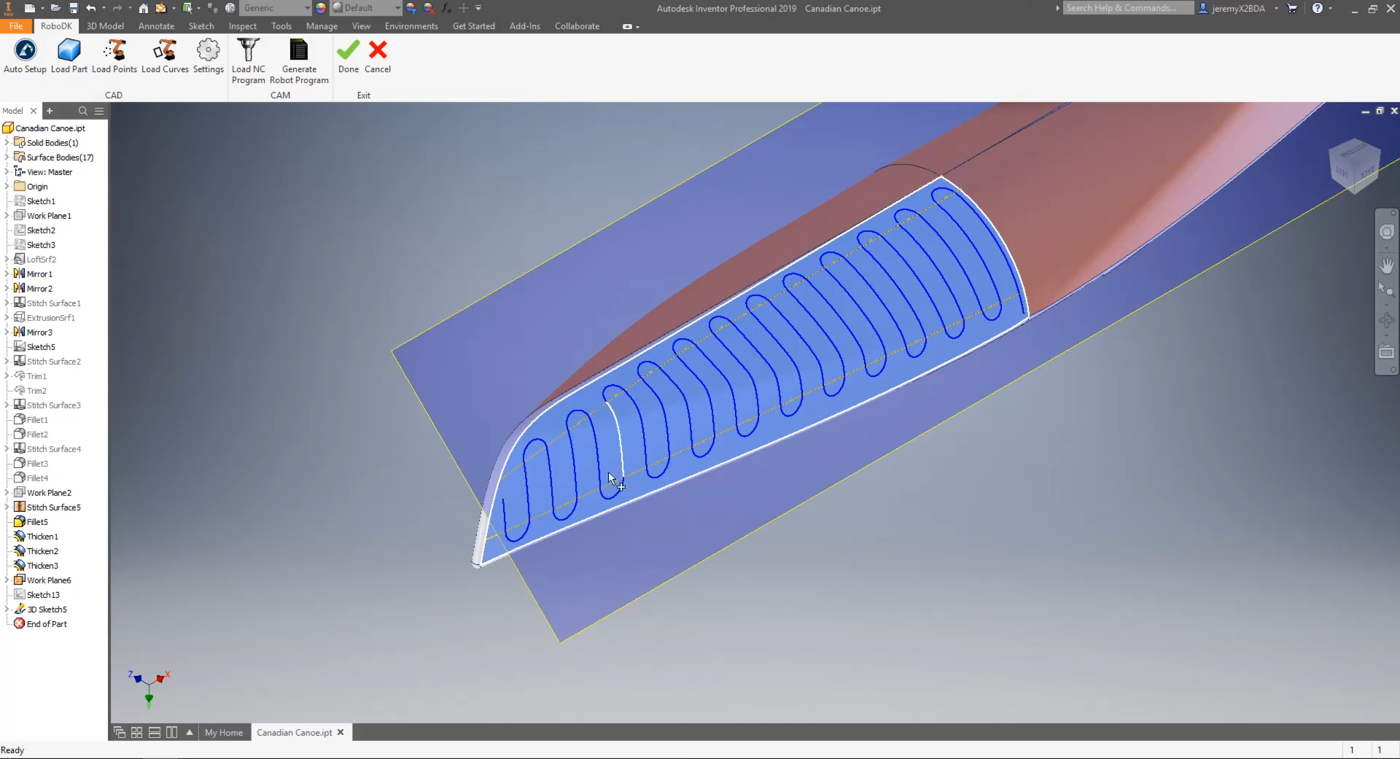
この例ではRoboDKがすでにパスを描いています。下図に示すように、左側のメニューから Sketch13➔ Visibility を右クリックすることで表示させることができます。
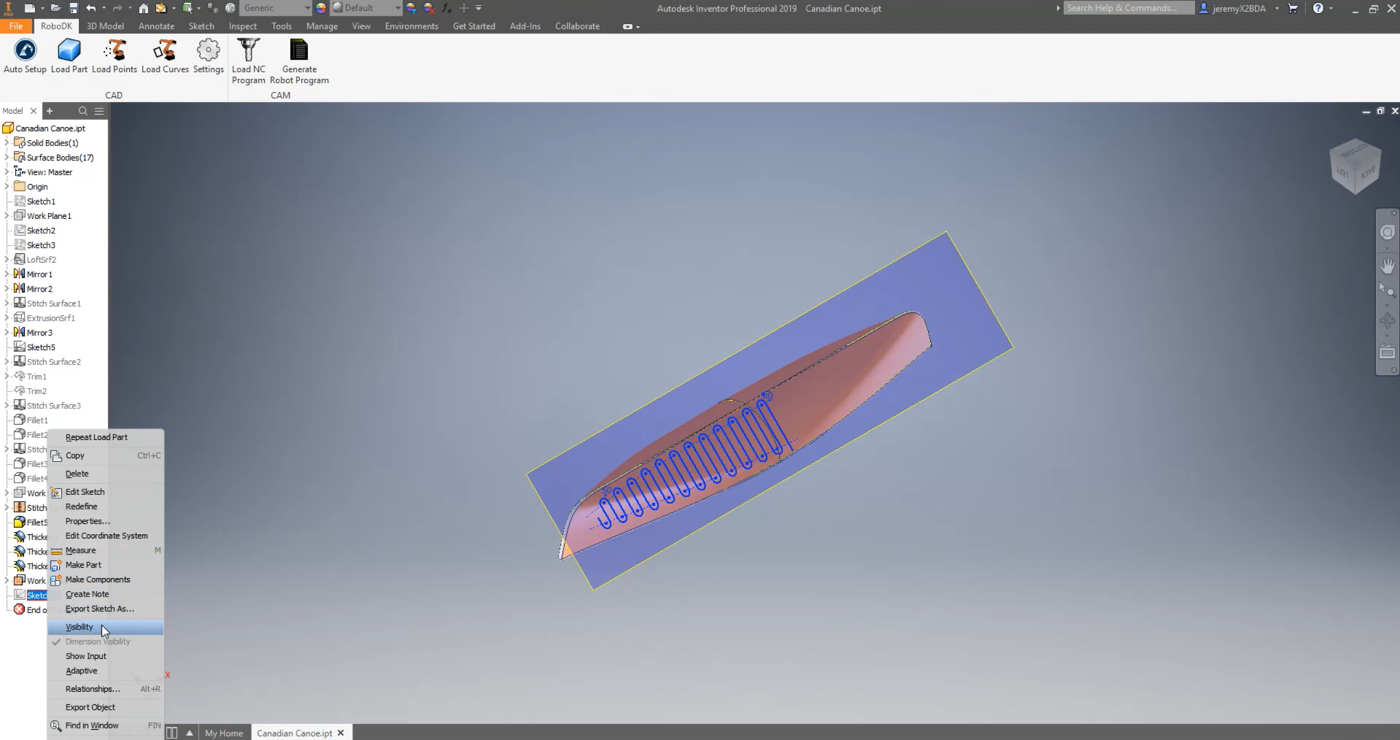
ご覧のように、パスは最初に選択されたセクションを全てカバーしています。Sketch13➔ Edit Sketch を右クリックして、スケッチを再度開き、必要であればパスを修正することができます。
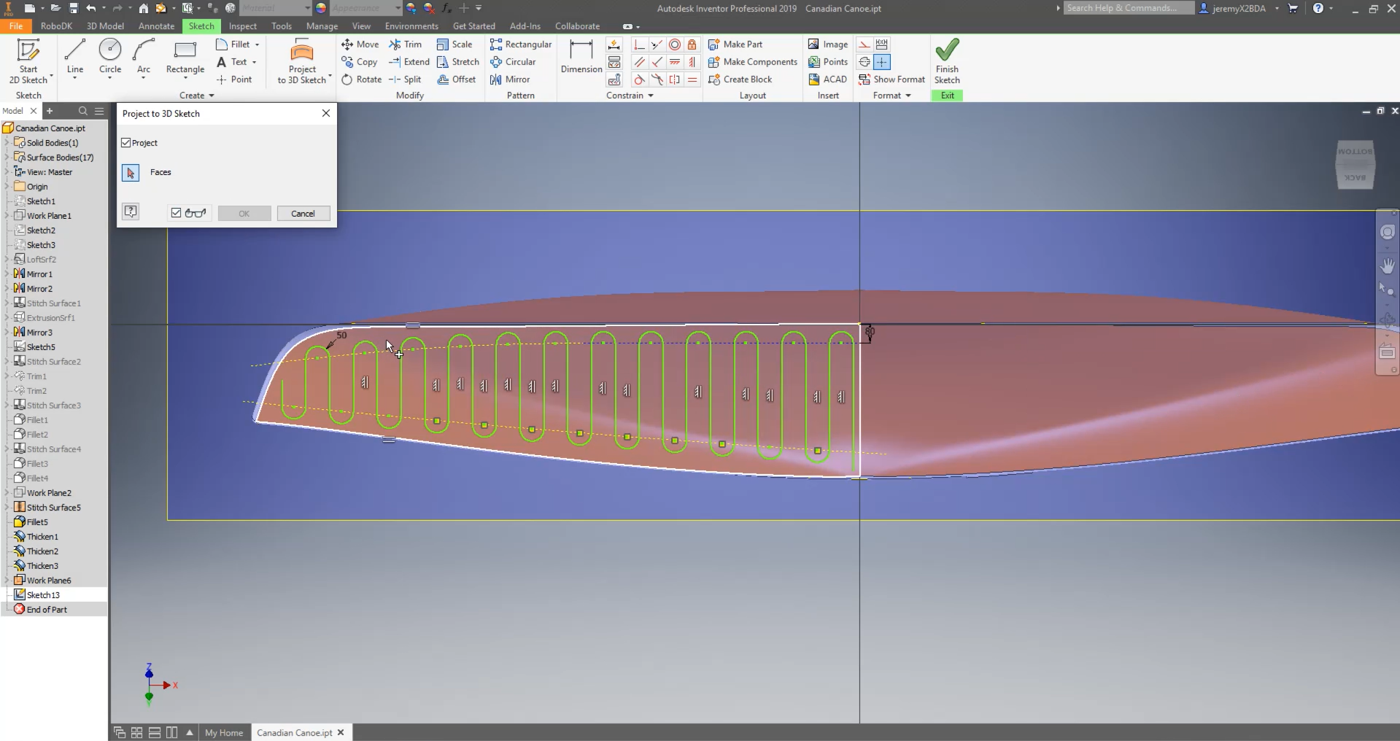
あとは、Inventorツールを使ってサーフェス上にパスを投影するだけです:
1.Inventor の [Sketch] タブを選択し、[Project to 3D Sketch] を選択します。
2.パスを投影したいサーフェスを選択します。
3.OKを選択し、スケッチを終了します。
これらの変更を受け入れるとすぐに、3Dスケッチが作成されます。
作成されたコンストラクションラインがコンストラクションラインとして正しく定義されていることを確認してください:
1.Sketch13➔ Visibility を右クリックして、パスを可視化します。
2.Sketch13➔を右クリックし、3D スケッチを編集します。
3.3Dモデル上でチェックしたいラインを選択します。
4.建設を選択します。
5.スケッチを仕上げるを選択します。
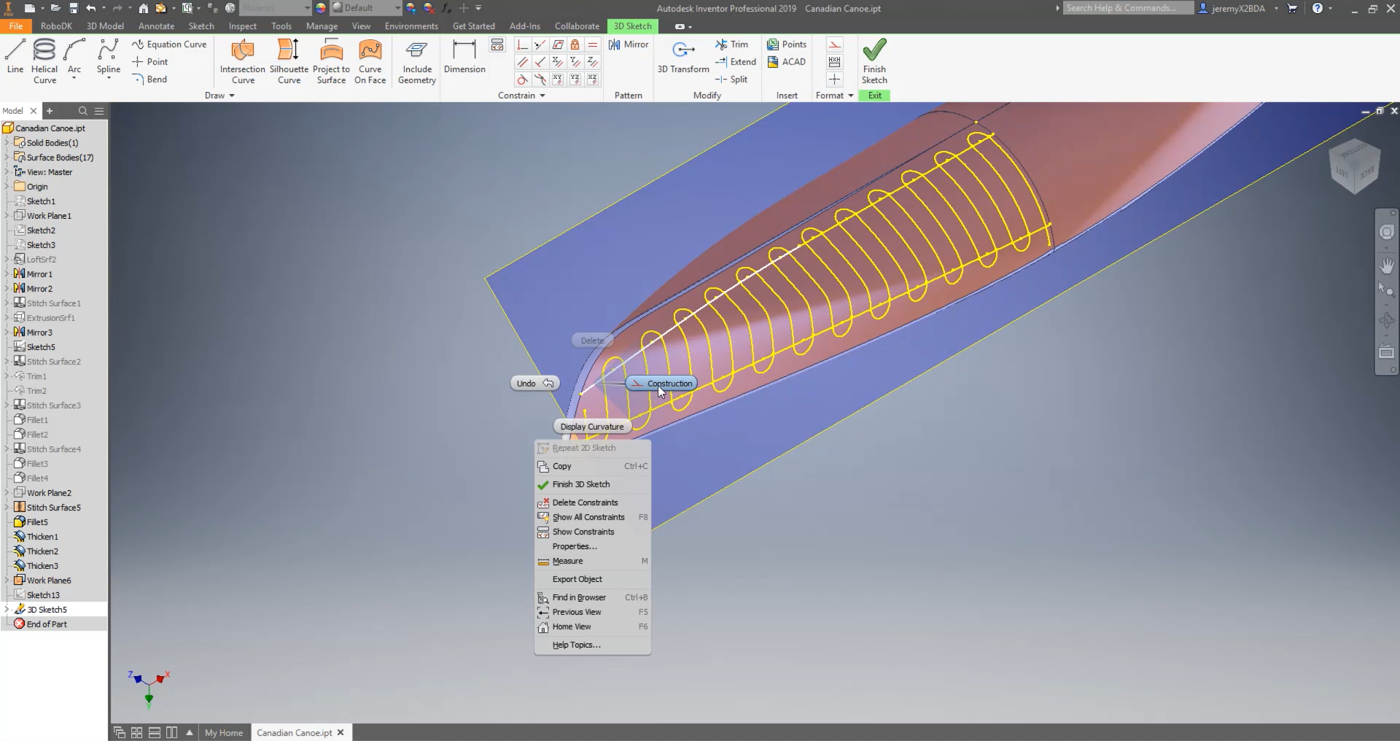
次の手順に従ってスケッチをRoboDKに読み込みます:
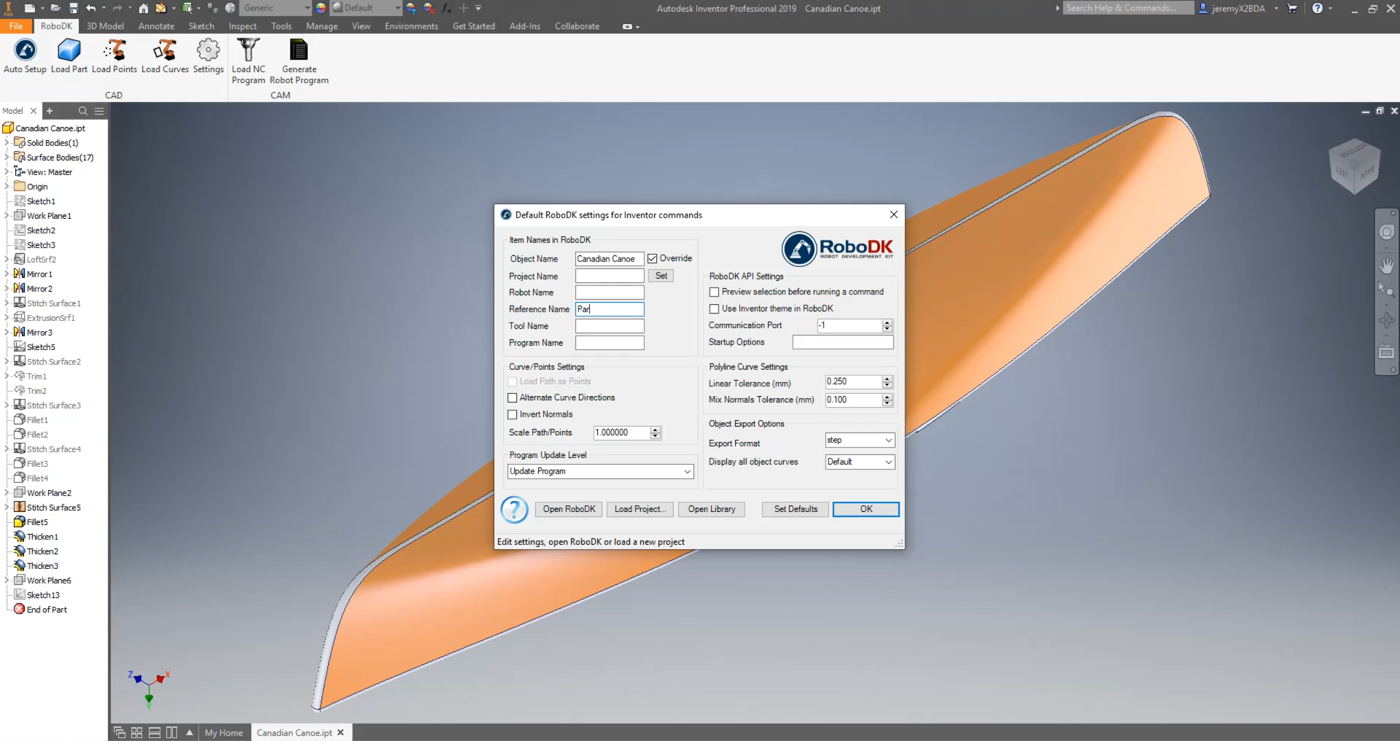
1.Inventor のRoboDK タブを選択し、
2.オブジェクト名を入力します。この場合は「カナディアンカヌー」です。
3.部品をインポートする参照名を入力します。この例ではPartです。参照名を入力しない場合は、アクティブ化された参照フレームが使用されます。アクティブな参照フレームがない場合は、新しい参照フレームが自動的に作成されます。
4.設定]ウィンドウを閉じるか、[OK]を選択します。
5.
6.スケッチのすべての線と上面を選択し、OKを押します。このステップはRoboDKにサーフェスの法線を計算するのに必要な情報を与え、曲面上の研磨ツールの向きを計算するのに重要です。
7.
RoboDKのアクティブな参照フレーム(Part)上に、パーツ(Canadian Canoe)とパス(Polish Path 1)がロードされているはずです。
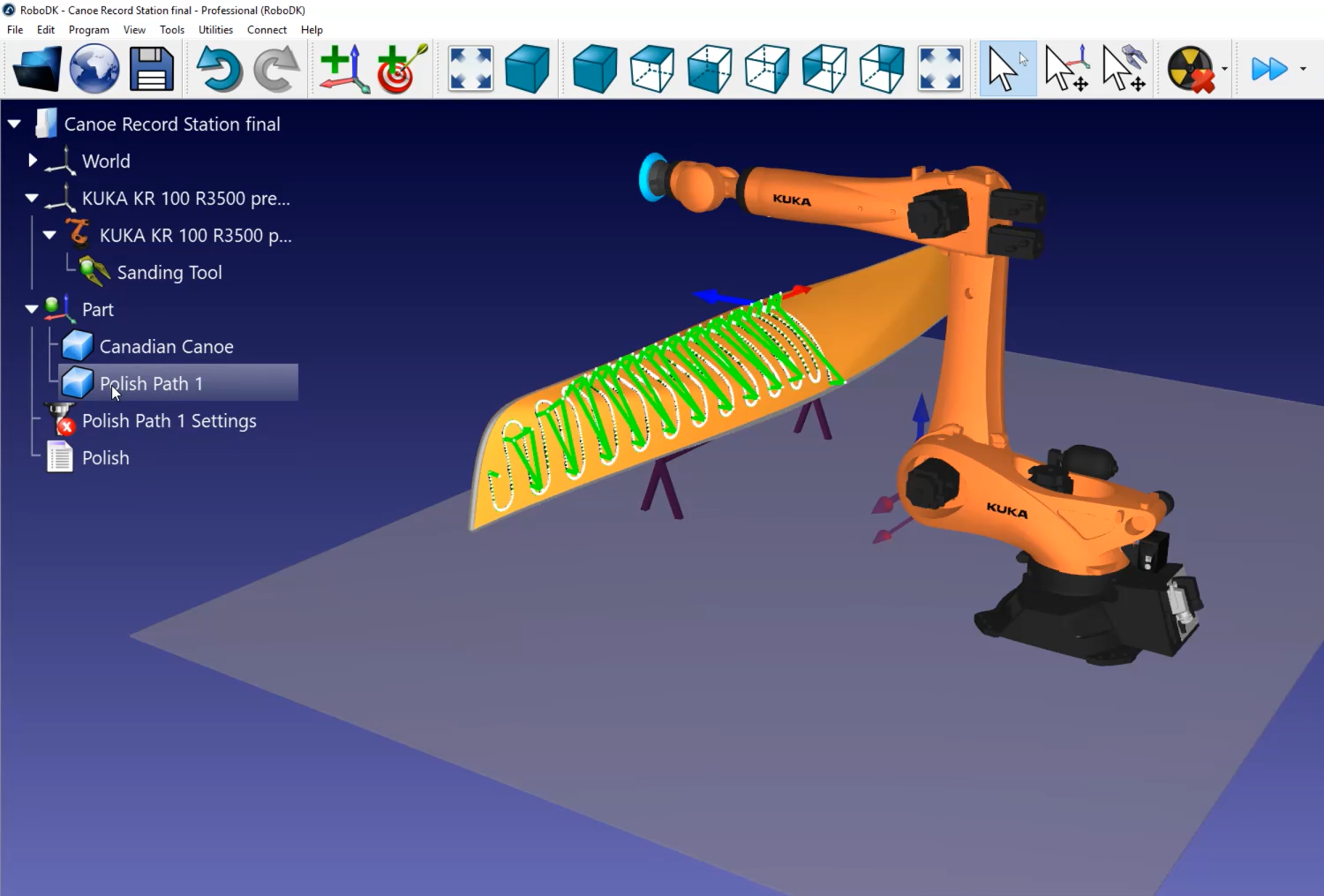
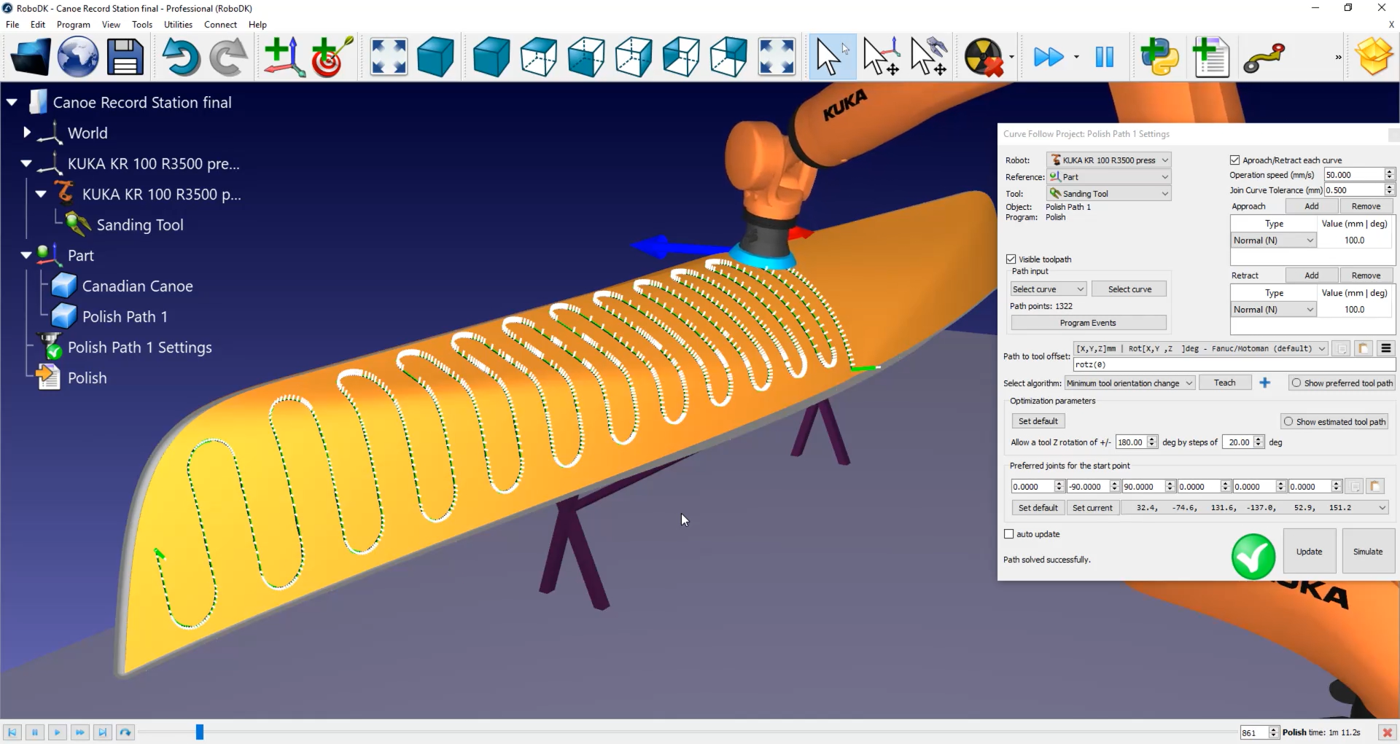
RoboDKステーション

注意: このプロジェクトのように複雑なプロジェクトの場合、"auto update "オプションのチェックを外すことをお勧めします。更新ボタンを使って手動で更新できます。
カヌーのパスから小さな白い線が出ているのがわかります。これはサーフェスの法線です。この例では、すべて正しくインポートされているようです。
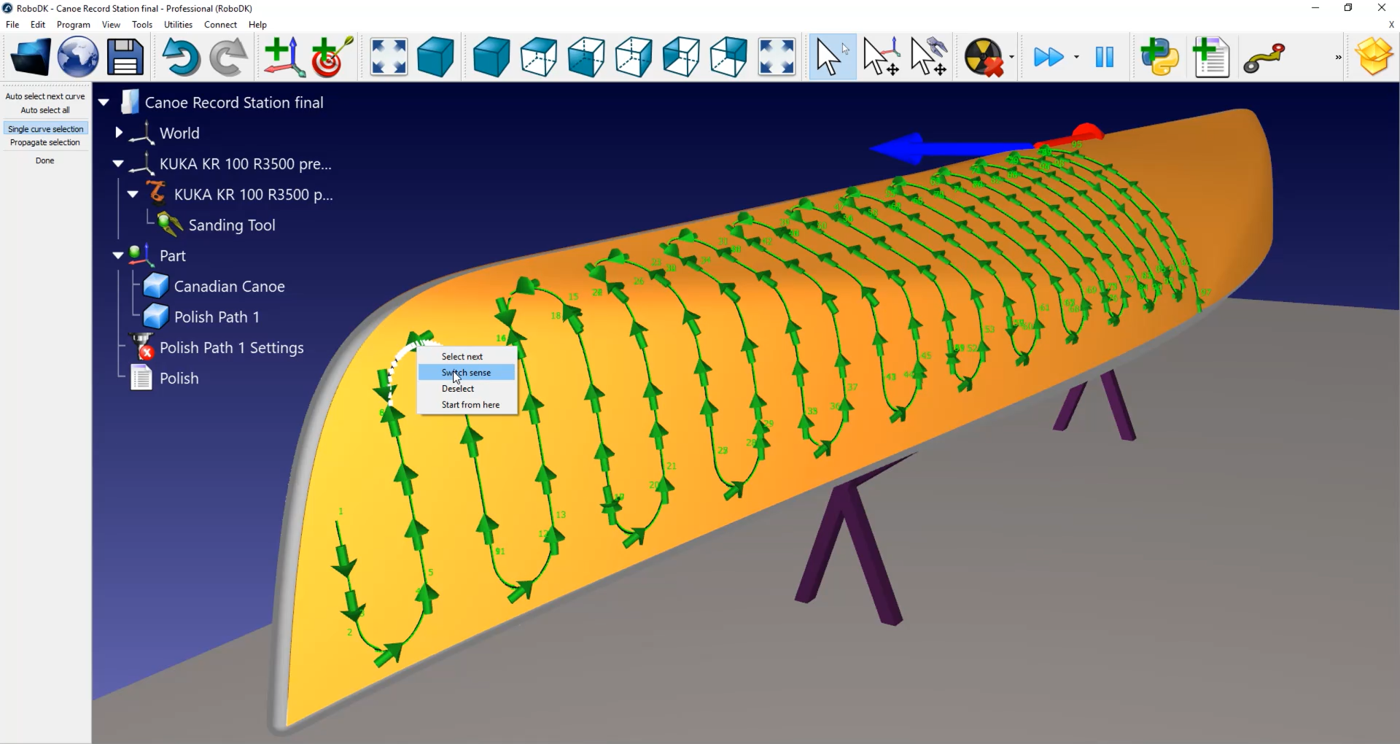
以下の手順に従って、パスの方向を設定してください:
1.
2.カーブの選択]をクリックします。
これで、パスセグメントが実行される順番と方向がわかります。方向を変えたい場合は、右クリックして、Switch sense を選択してください。
この場合、パスをやり直す必要があります:
1.ステーションの何もない場所(青い背景など)を右クリックします。
2.選択をリセットを選択します。
3.開始したい線を選択します。正しい方向に向いていることを確認してください。
4.画面の左上にある「すべてを自動選択」ツールを選択します。
5.完了を選択します。
注意:デフォルトでは、進路に対して100ミリのアプローチとリトラクトがあります。つまり、ロボットが降りてきて経路を開始します。しかし、
また、
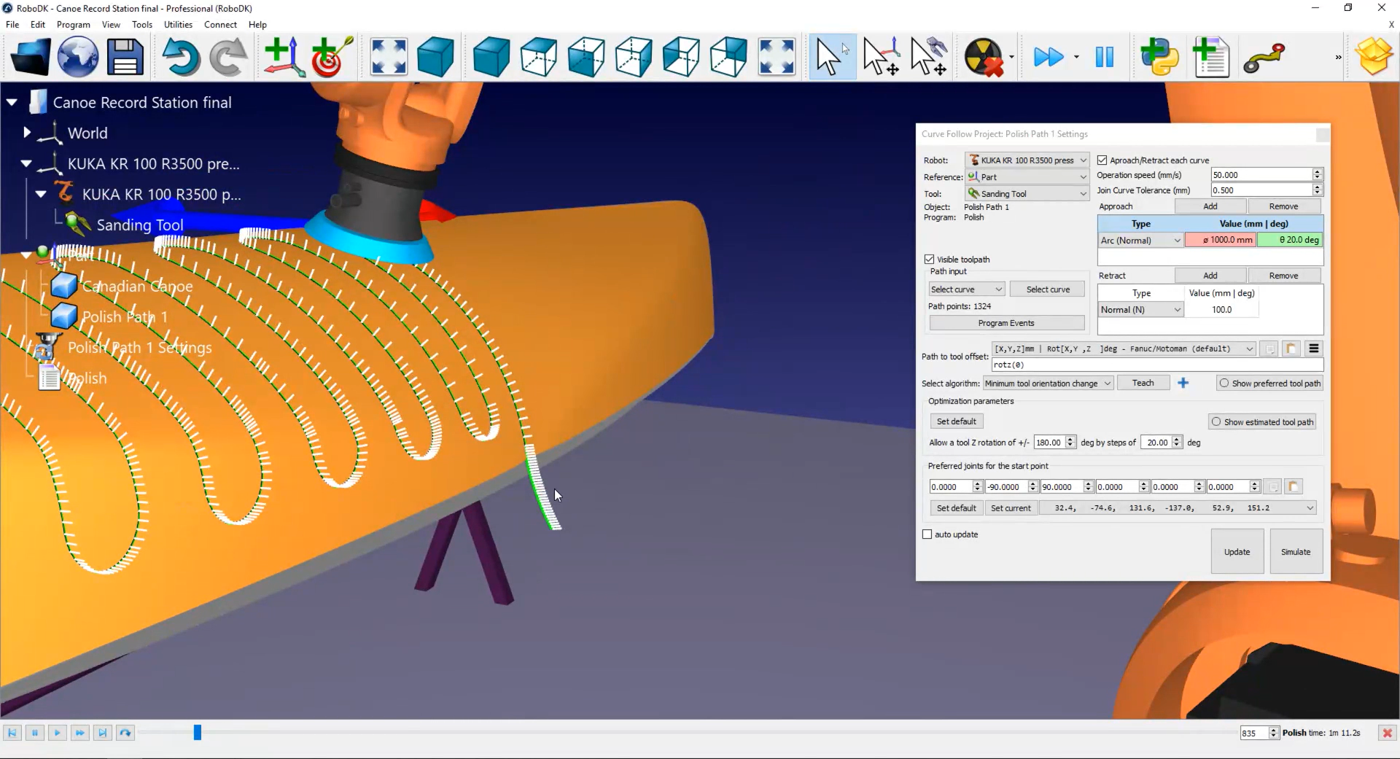
このメニューでは、Set Rounding オプションを有効にすることもできます。デフォルトでは、パスに沿ったすべての白線は、ロボットが停止する必要があるポイントとしてロボットコントローラに送信されます。研磨やサンディングのアプリケーションでは、これは最良の動作ではありません。
Set Roundingチェックボックスをにして、コントローラの連続移動オプションを有効にします。ロボットのブランドによって、このオプションの名前は「丸め」、「一定移動」、「ゾーンデータ」となります。この例では、値は0.5mmになります。
ヒント: このメニュー
ヒント: 操作速度を変更することで研磨速度を変更できます。
この例では、KUKAロボットを使用しているので、ロボットプログラムを生成するときにSRCファイルを取得します。このファイルはKUKA KRCコントローラで読むことができます。
以下の手順に従ってロボットプログラムを作成してください:
1.
2.OKを選択します。
3.