スポット溶接
スポット溶接は、ロボットシミュレーションソフトウェアを使用する必要がある最も一般的な作業の1つです。このガイドでは、車体パネルのスポット溶接を自動化するためのロボットのシミュレーションとプログラミング方法をご紹介します。
ビデオ次のビデオは、このスポット溶接アプリケーションの最終結果を示しています https://www.youtube.com/watch?v=GLMjJOO-_x8.
サンプルは実例ライブラリでご覧いただけます:スポット溶接ステーションリンク
注意: 初めてRoboDKをお使いになる方は、この入門ガイドをお読みください。
要件
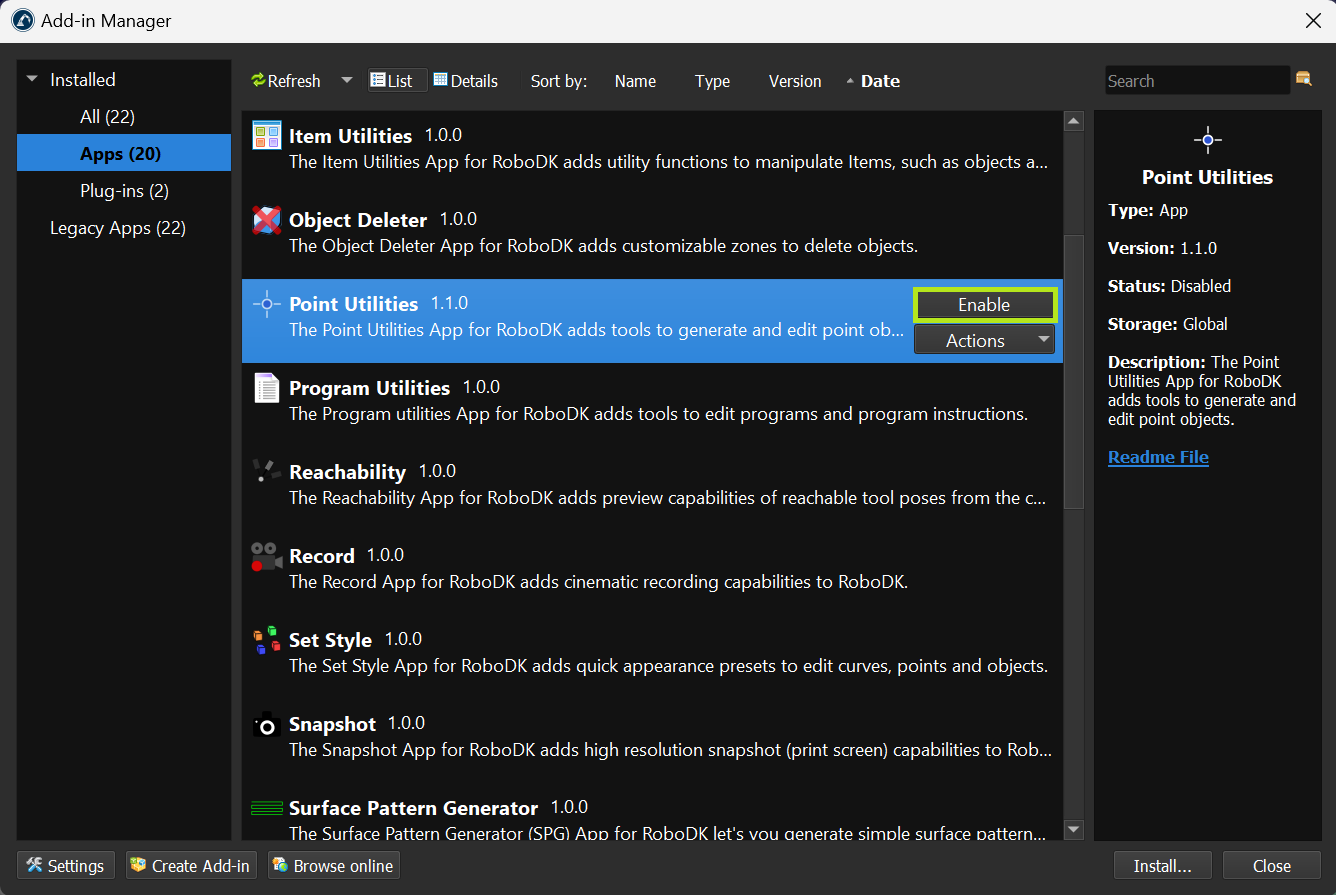
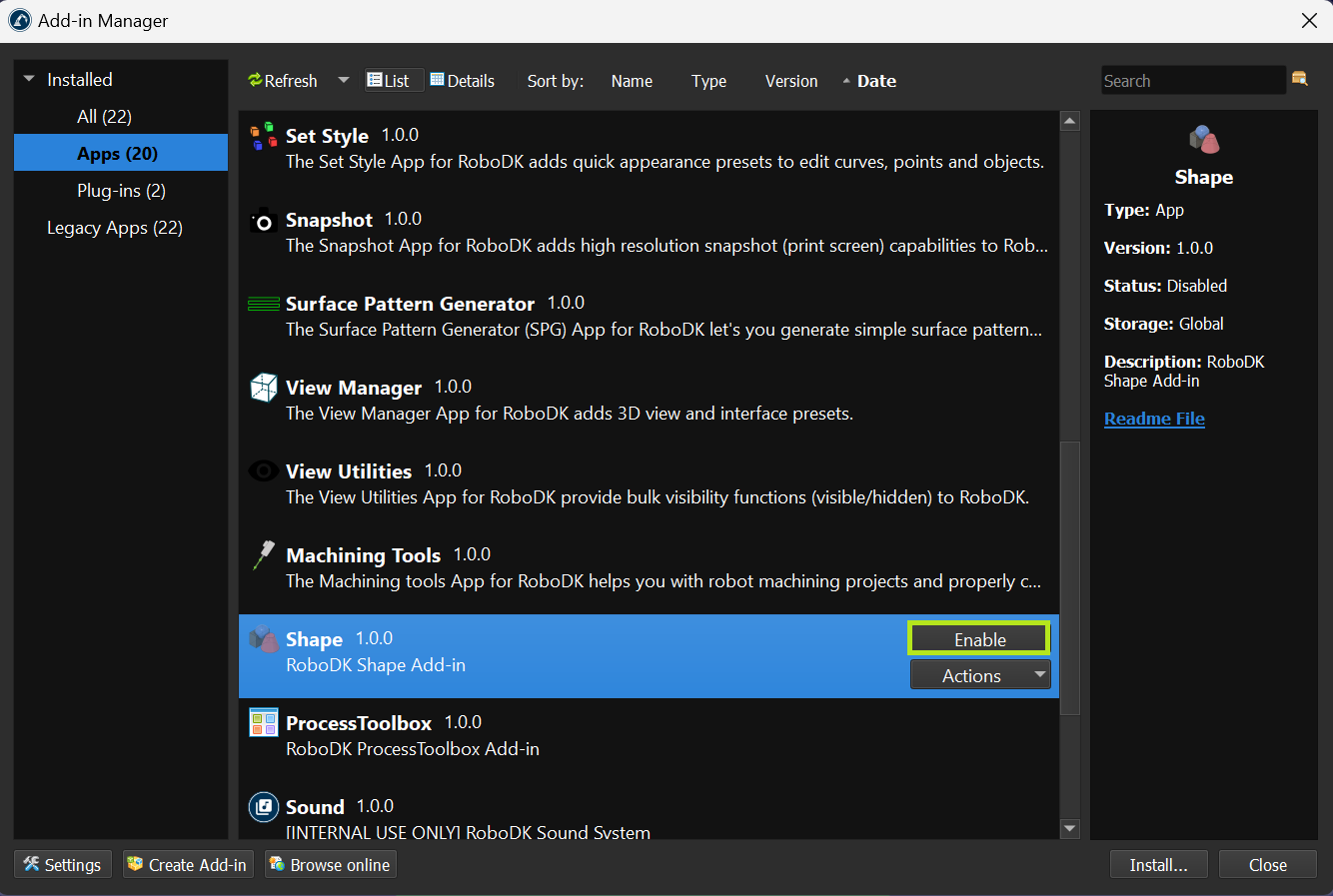
スポット溶接のサンプルを正しく作成するには、RoboDK v5.5.4 以降をお使いください。このバージョンの RoboDK にはポイントユーティリティと形状アドインが含まれており、スポット溶接プロジェクトの作成が容易になります。
ワークフロー
このセクションでは、Collision Free Plannerプラグインを使用した無衝突パスの自動生成を含む、スポット溶接シミュレーションの作成方法を説明します。
このセクションでは、スポット溶接プロジェクトの作成プロセスを以下のステップに分けて説明します:
1.必要なモデル、ロボット、ツールをすべてロードします。
2.ツール(TCP)を設定します。
3.ターゲットを作る
4.ロボット軌道の作成とチェック。
5.パスを分析します。
6.プログラムの順序を整理します。
7.ロボットプログラムの生成
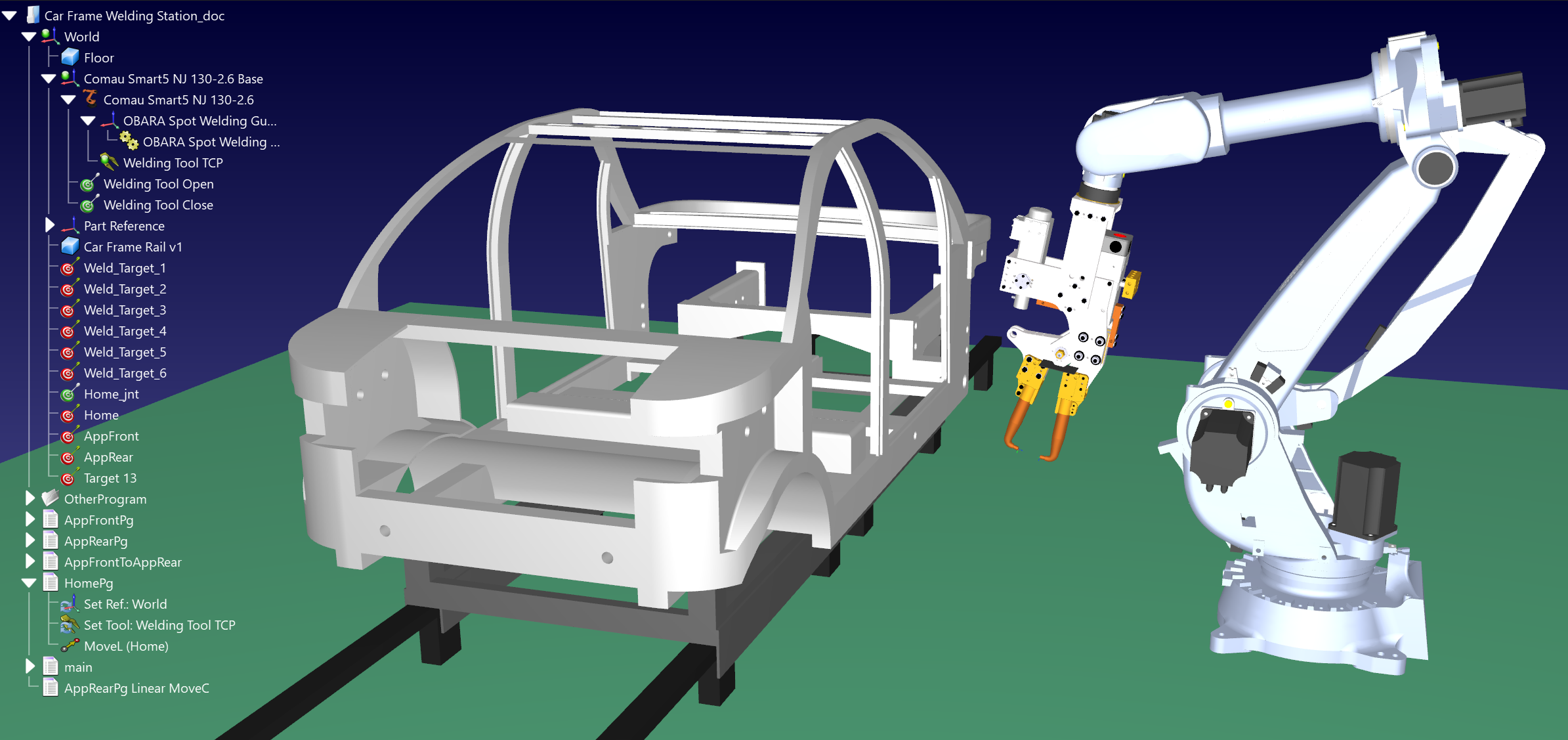
ステーションコンポーネント
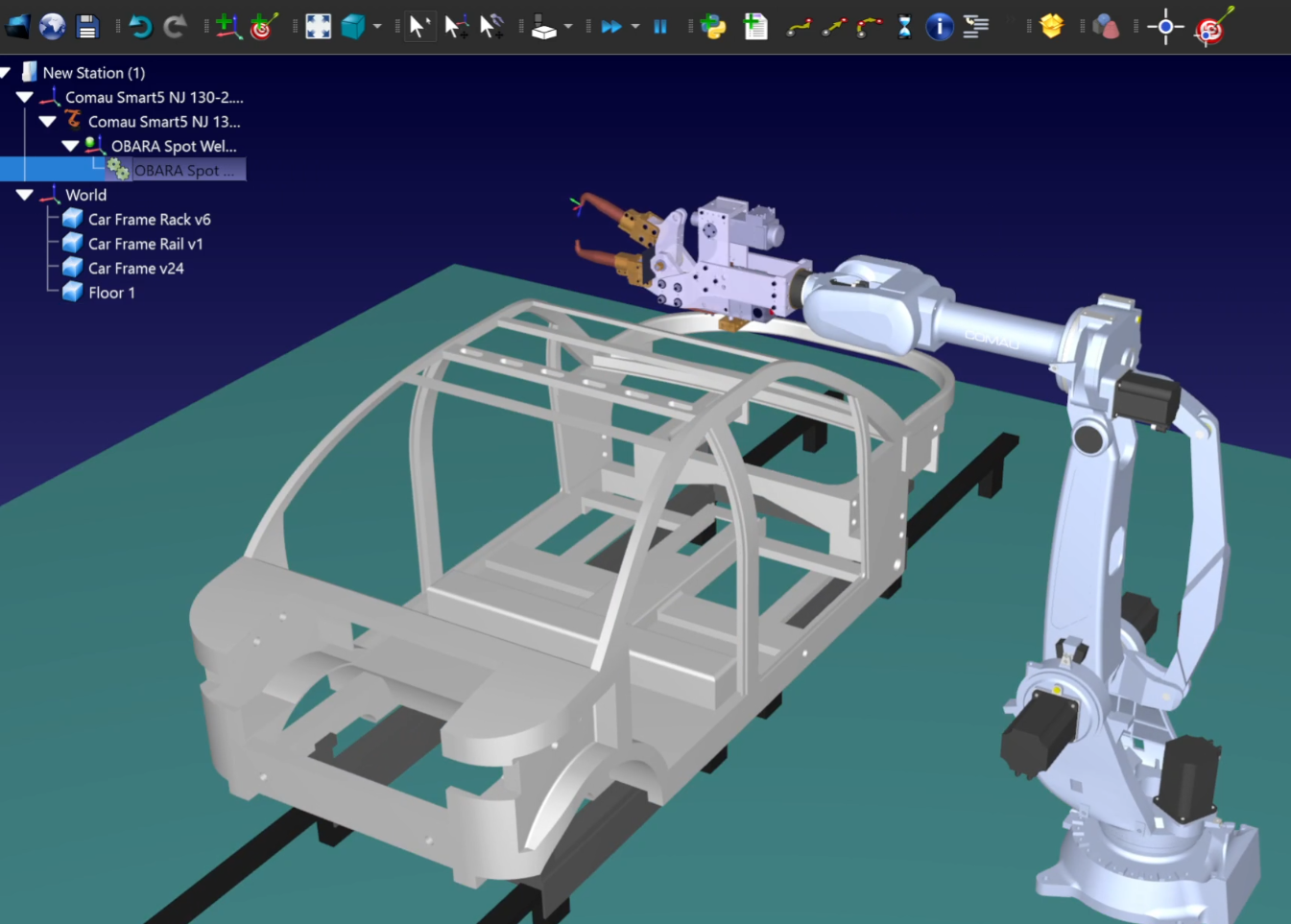
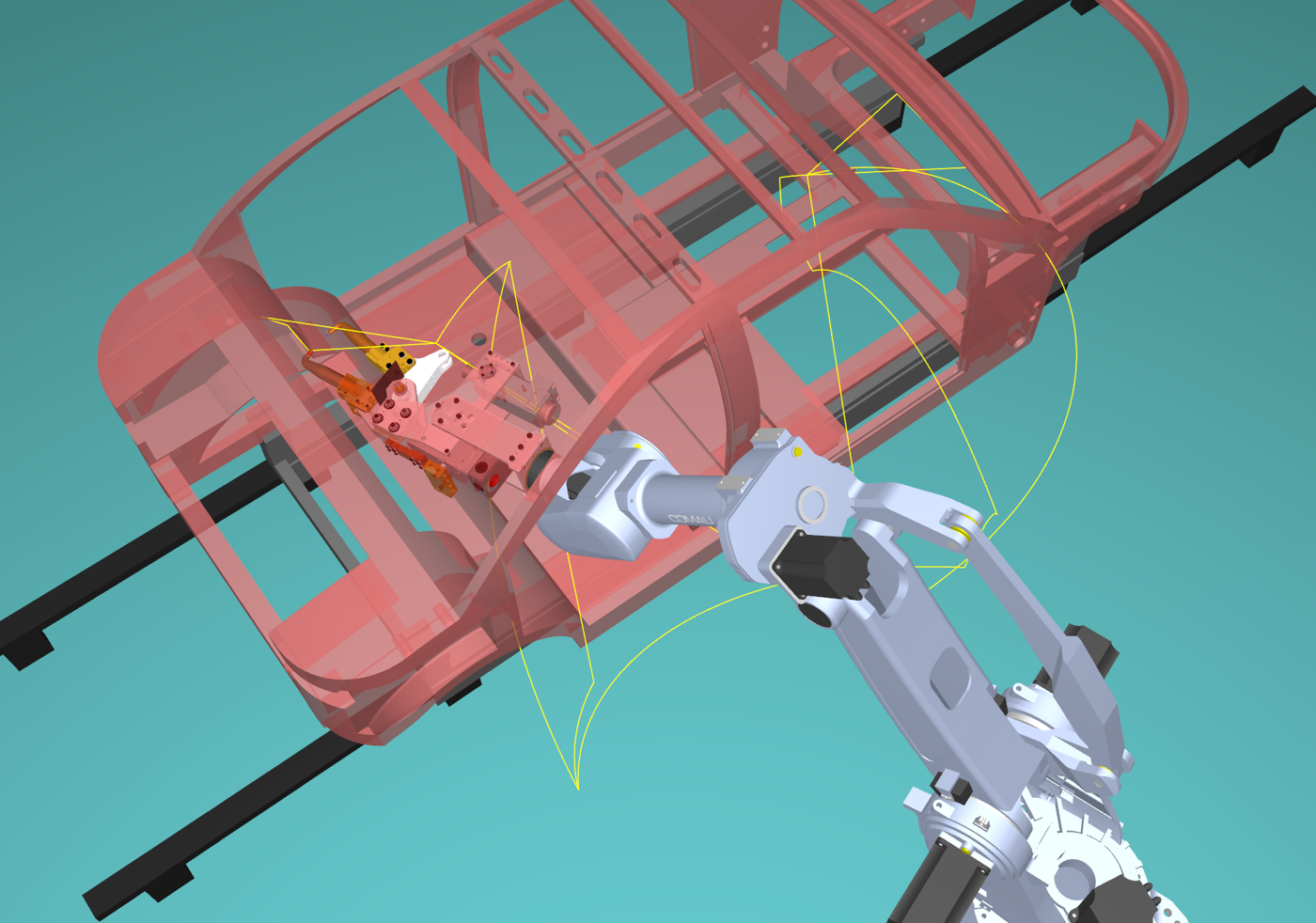
まず、ロボットとスポット溶接ガンをロボットツールにセットします。
RoboDKオンラインライブラリから以下のコンポーネントを利用できます:
1.ロボットコマウ Smart5 NJ 130-2.6
2.工具OBARAスポット溶接ガン
ペデスタルとフィクスチャーはローカルファイルを使ってロードされ、フロアを作成するためにシェイプ・アドインを使います。詳しくは、Getting Started GuideとShape Add-in Documentationをご覧ください。
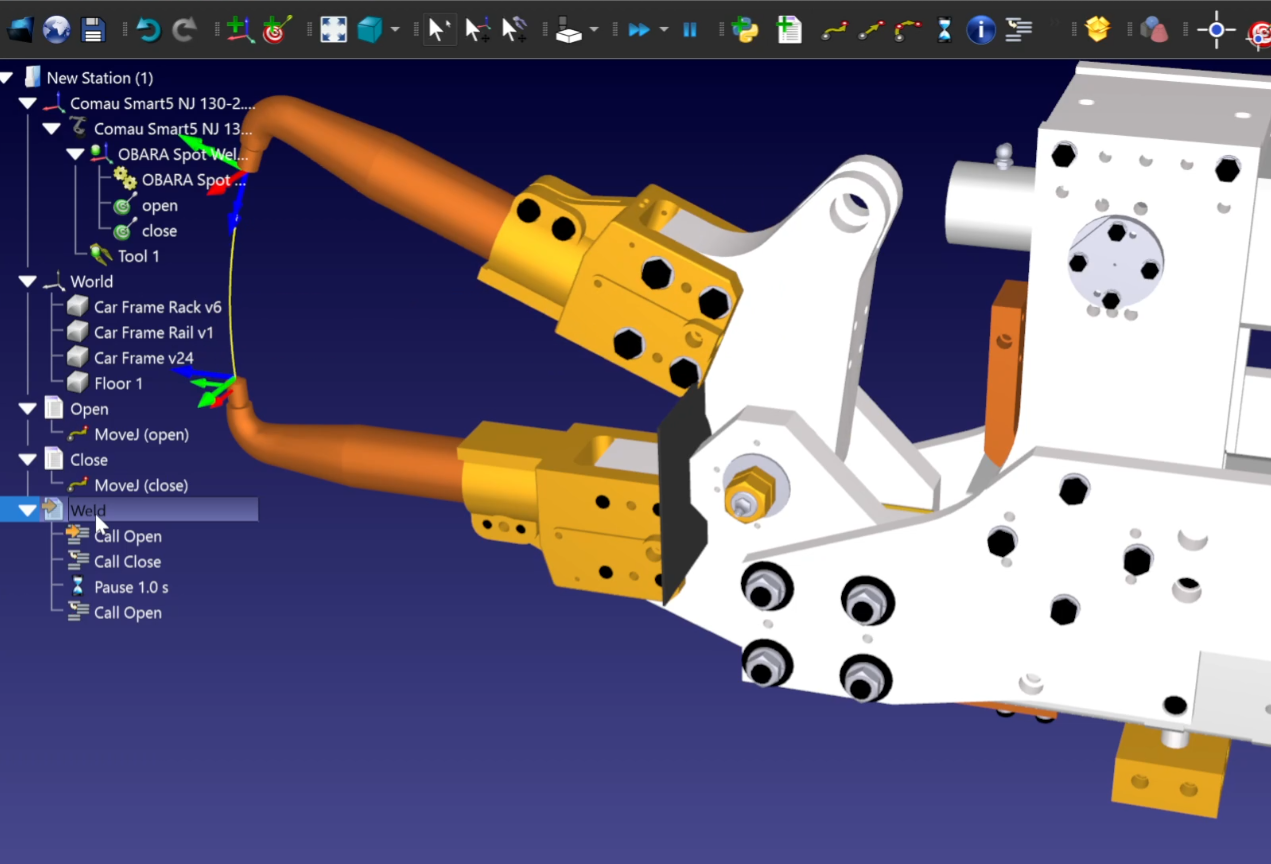
スポット溶接ガン
このセクションでは、スポット溶接ガンの動きをアニメーション化し、ツール・センター・ポイント(TCP)を作成する方法を紹介します。
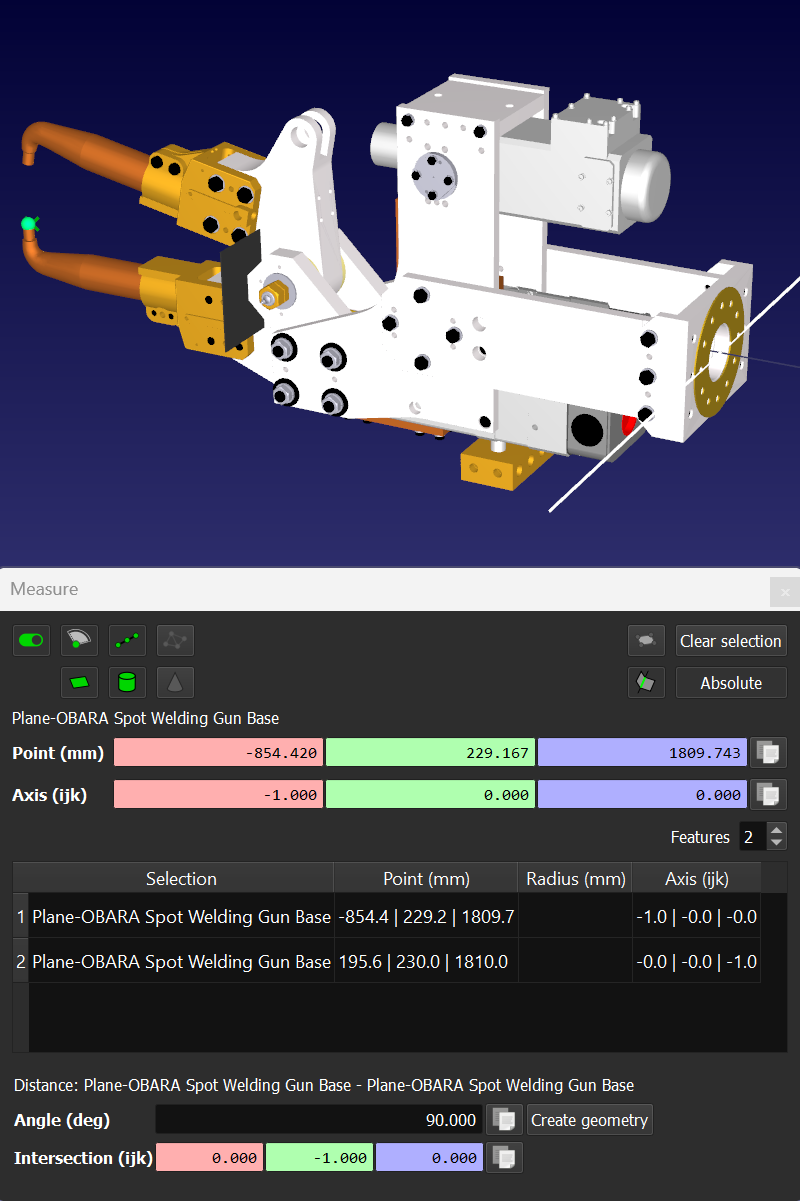
可動式クランプ部を持つスポット溶接ガンを追加するには、対応する TCP を定義し、機構を別途取り付ける必要があります。Tools-Measureを選択すると、フランジに対するTCPポイントの位置を測定できます。
スポット溶接ガンを開閉する2つのジョイント・ターゲットを作成できます。これらのターゲットは、スポット溶接プロセスをシミュレートするプログラムで使用できます:
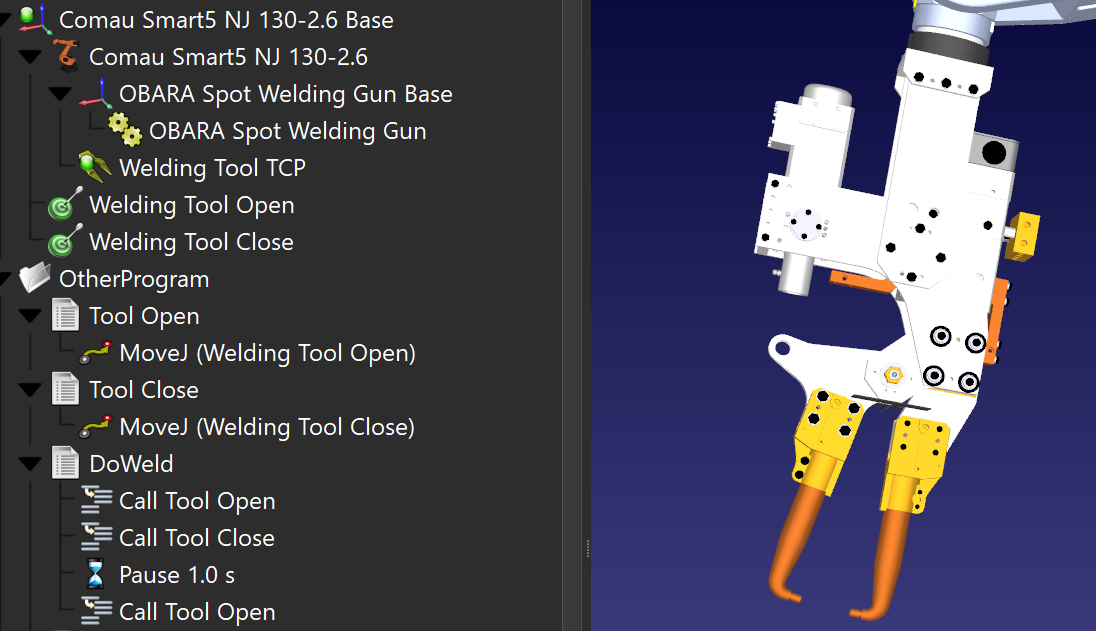
注:これらの共同ターゲットおよびプログラムは、OBARAスポット溶接ガンメカニズムに割り当てられている必要があります。
注: 一時停止命令をスポット溶接プログラムに追加することで、実際のプロセスに近づけることができます。
スポット溶接のポイント
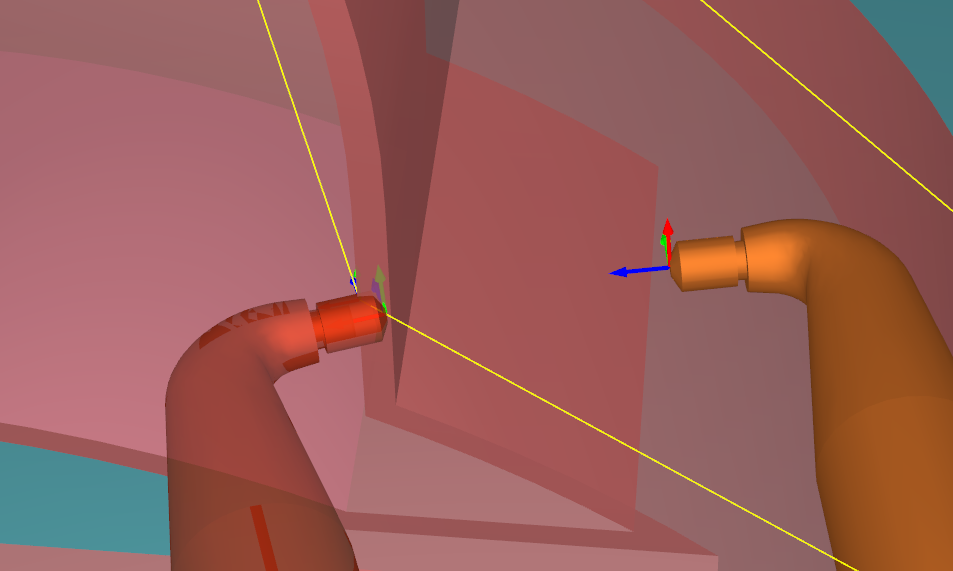
このセクションでは、スポット溶接ガンを移動させるためのスポット溶接ポイントを車のフレーム上に作成する方法を示します。
車のフレームのフロントとリアをスポット溶接する必要があるとします。Point Utilities Add-inを使用すると、サーフェス上に直接スポット溶接点を配置することができます。ポイントをターゲットに変換した後(これはPoint Utilitiesアドインの組み込み機能です)、TCP角度に対するターゲットの向きを再調整することができます:
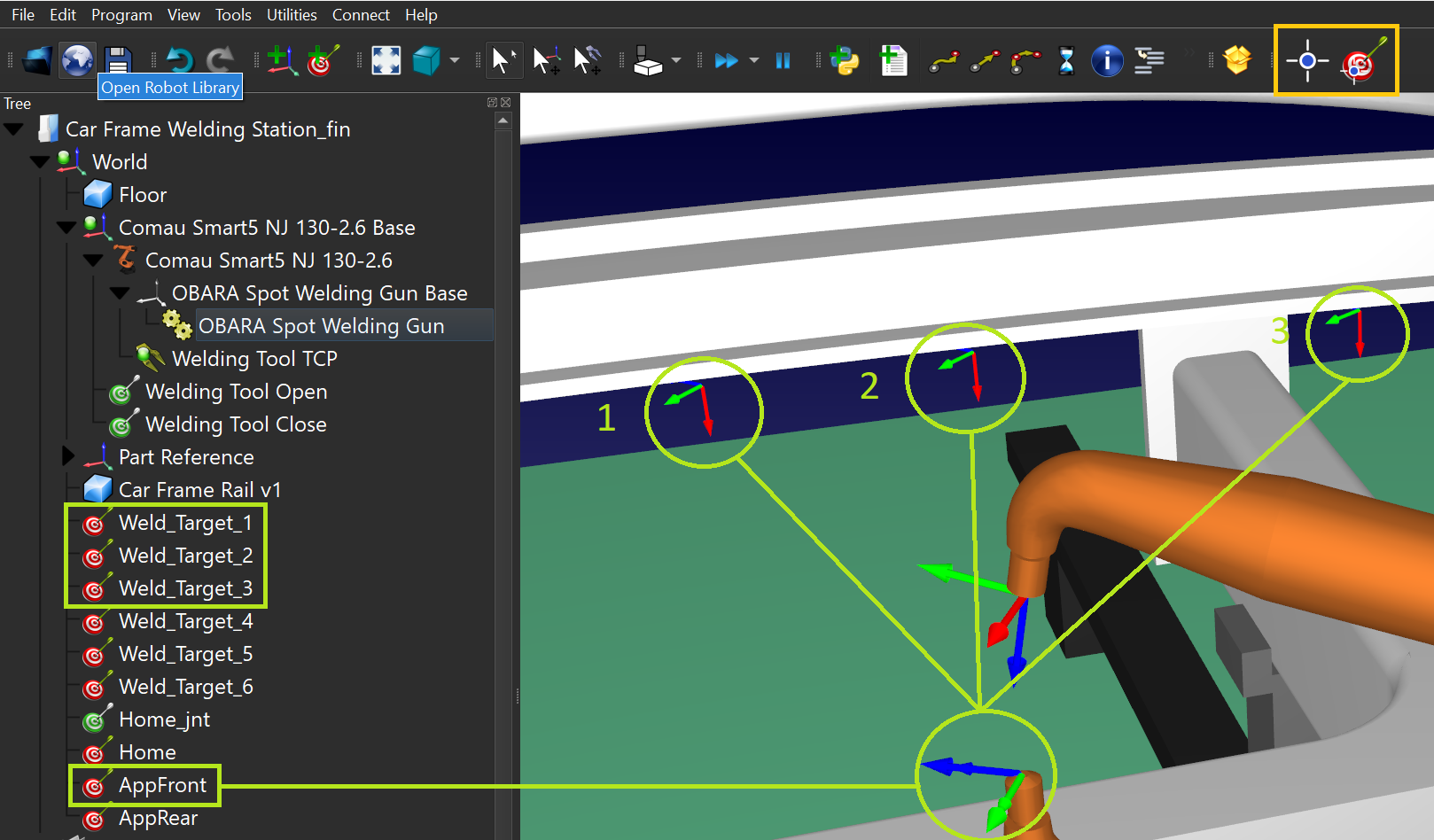
注意:特定の位置に点を配置する必要がある場合、モデル上に幾何学的なフィーチャがある必要があります(例えば、Measureツールで検出できるフィーチャ)。
軌道計画
このセクションでは、車のフレーム内の2点間で衝突のないパスを作成する方法を示します。
車両のフレームにはフォースビームがあり、前方から後方へのアクセスが容易ではありません。
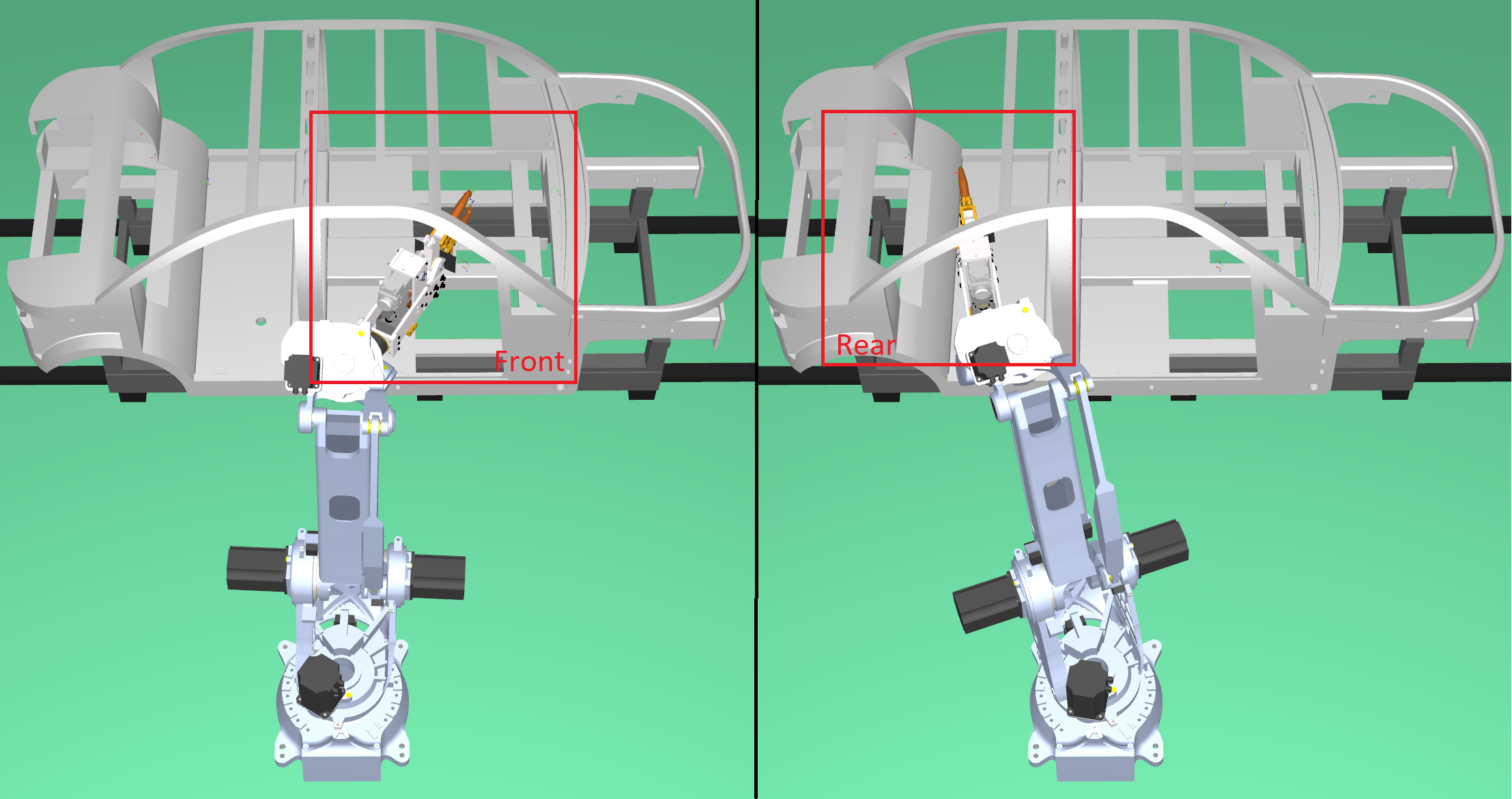
また、2つのアプローチターゲットの間に中間ターゲットを作成する必要があります。スポット溶接ターゲットのツール位置に基づいて、アプローチターゲットを作成することができます。
衝突検知
パスができたら、コリジョンがあるかどうかを再チェックし、コリジョンマップが正しく定義されていることを確認します。
ToolsàCheckCollisionsを選択すると、パーツが衝突しているかどうかをチェックできます。これは衝突検出の有効/無効を切り替えます。
Tools->Collision mapでコリジョンマップを設定できます。
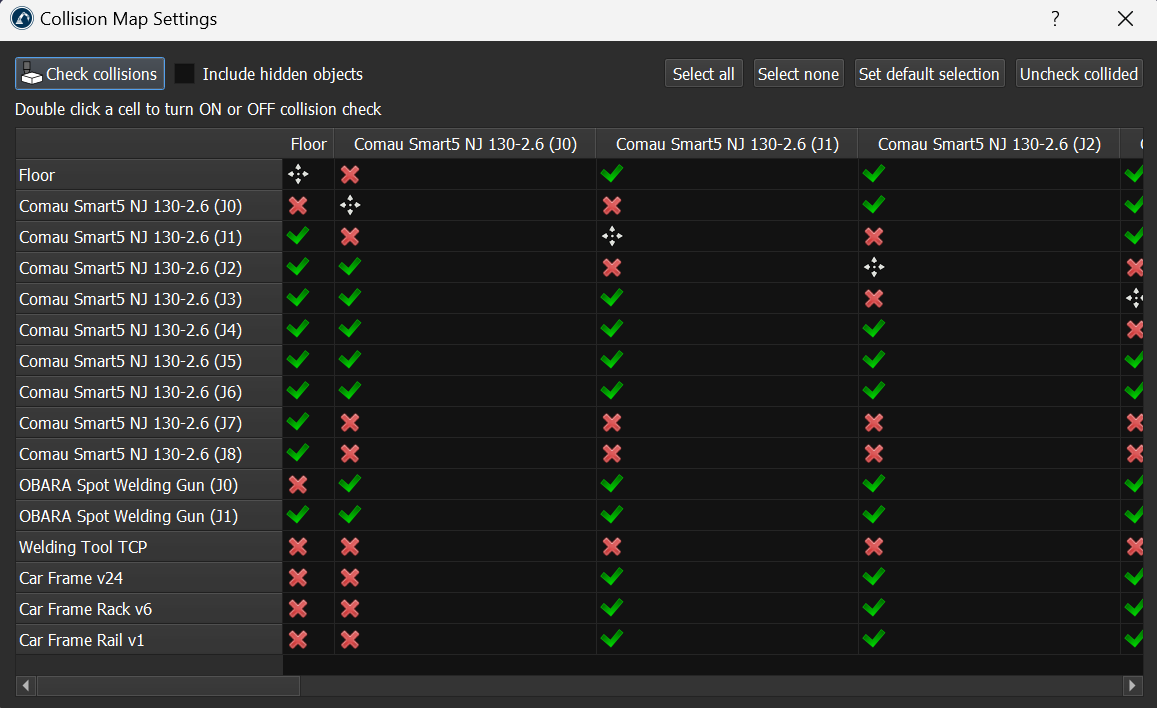
注:衝突判定についての詳細はこちらをご覧ください。
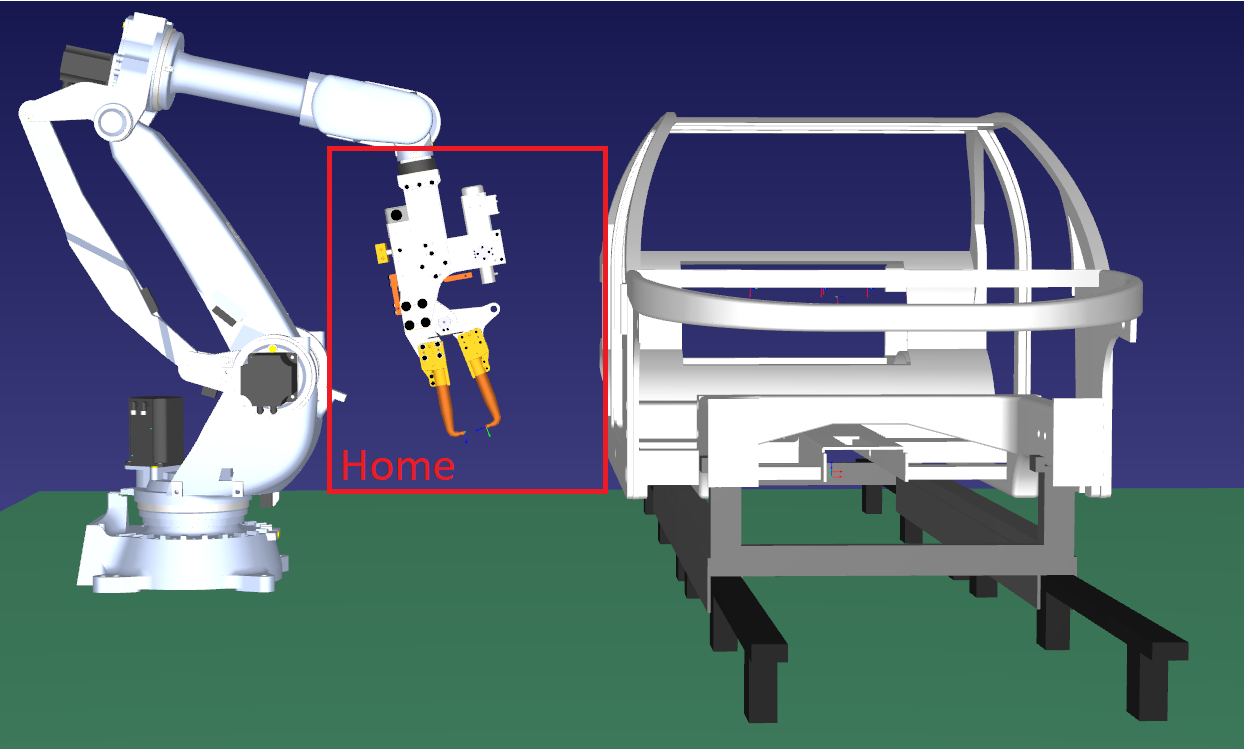
プログラムシーケンス
このセクションでは、スポット溶接シーケンスをメイン・プログラムとサブ・プログラムに分割して作成し、シミュレーションと生成されたプログラムを整理しておくのに役立ちます。
シミュレーションを複数のプログラムに分割することは、将来的な修正やチームでの共同作業に便利です。このステーションでは、いくつかのルーチンを持つメインプログラムを使用します:
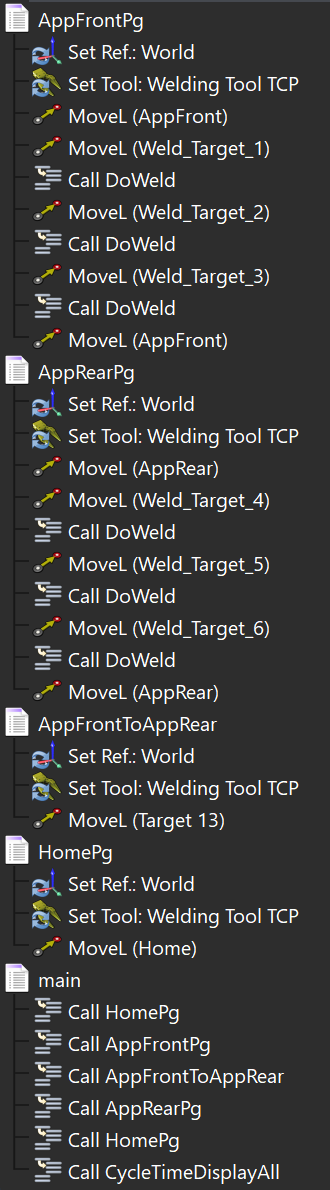
注:プログラムコールの詳細については、こちらをご覧ください。
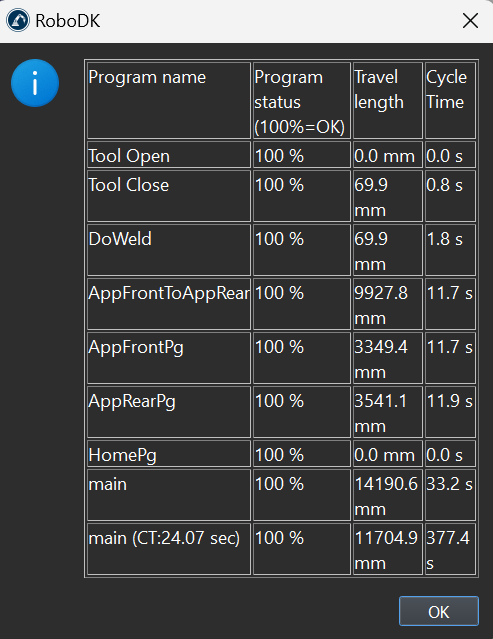
サイクルタイムの推定
このセクションでは、スポット溶接シミュレーションの概算サイクル・タイムを計算し、表示する方法を紹介します。
C:◆RoboDKLibraryScriptsフォルダからCycleTimeDisplayAll.pyスクリプトをロードするだけで、簡単にプログラムに時間推定を追加することができます。このスクリプトはメインプログラムから呼び出すことができます:
ヒント: CycleTimeDisplayAll.pyスクリプトはToolsàRun Scriptを選択しても実行できます。
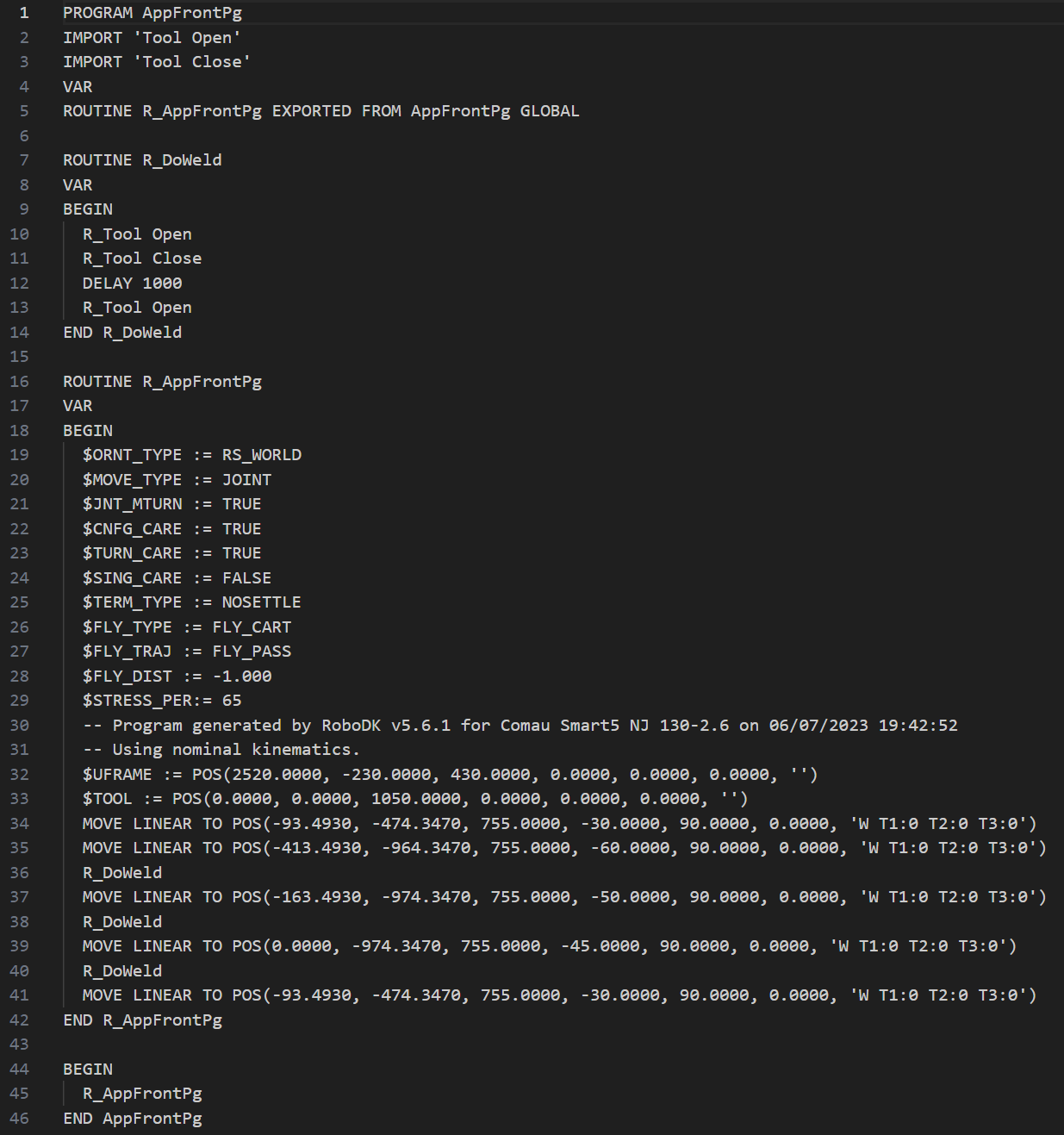
ロボットプログラム生成
スポット溶接アプリケーションに有効なシミュレーションシーケンスがあれば、数回クリックするだけでプログラムを生成できます。
ロボット用に生成したいプログラムを右クリックして選択し、ロボットプログラムの生成を選択します。
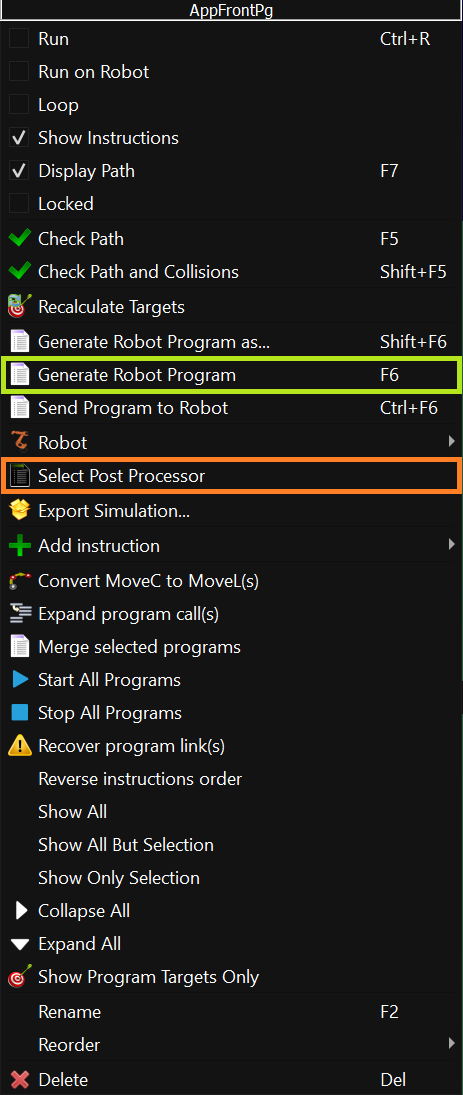
注:プログラムまたはロボットを右クリックし、"Select Post Processor "をクリックすることでポストプロセッサーを変更することができます。シミュレーションを再現するためにComau C5Gコントローラーが必要とするプログラム/コードが表示されます。