Welding with Positionner
はじめに
この例では、タンク溶接シミュレーションに RoboDK を使用する方法をご紹介します。この例には、タンクサンプルモデルと、ABB 溶接ロボットと単軸ポジショナを組み合わせたロボットセルが含まれています。
ビデオSolidWorksとRoboDKによるロボット溶接: https://www.youtube.com/watch?v=5Gcy_zg3sH4。
注: RoboDK 溶接アドインについては、こちらのリンクをご覧ください。
ヒントRoboDK Fusion360 CAD プラグインについてはこちらをくださいご覧。
ヒント: この例で使われている RoboDK プロジェクトはサンプルステーションライブラリにあります:Synchronization-and-Welding-with-ABB-02.
ロボット溶接例
このロボット溶接プロジェクトを進めるには、まずデフォルトライブラリのRoboDKロボット溶接例(ポジショナー付き)を選択します。次に、Fusion360で溶接パスを選択します。次にRoboDKでロボットパスを調整します。
モデルのインポート
まず、Fusion360からパーツと溶接パスをインポートします。
ヒントFusionからパーツ、カーブ、ポイントをインポートする方法については、関連ビデオをご参照ください: https://www.youtube.com/watch?v=gxob-94fNLo.
Fusion360からモデルをインポートします:
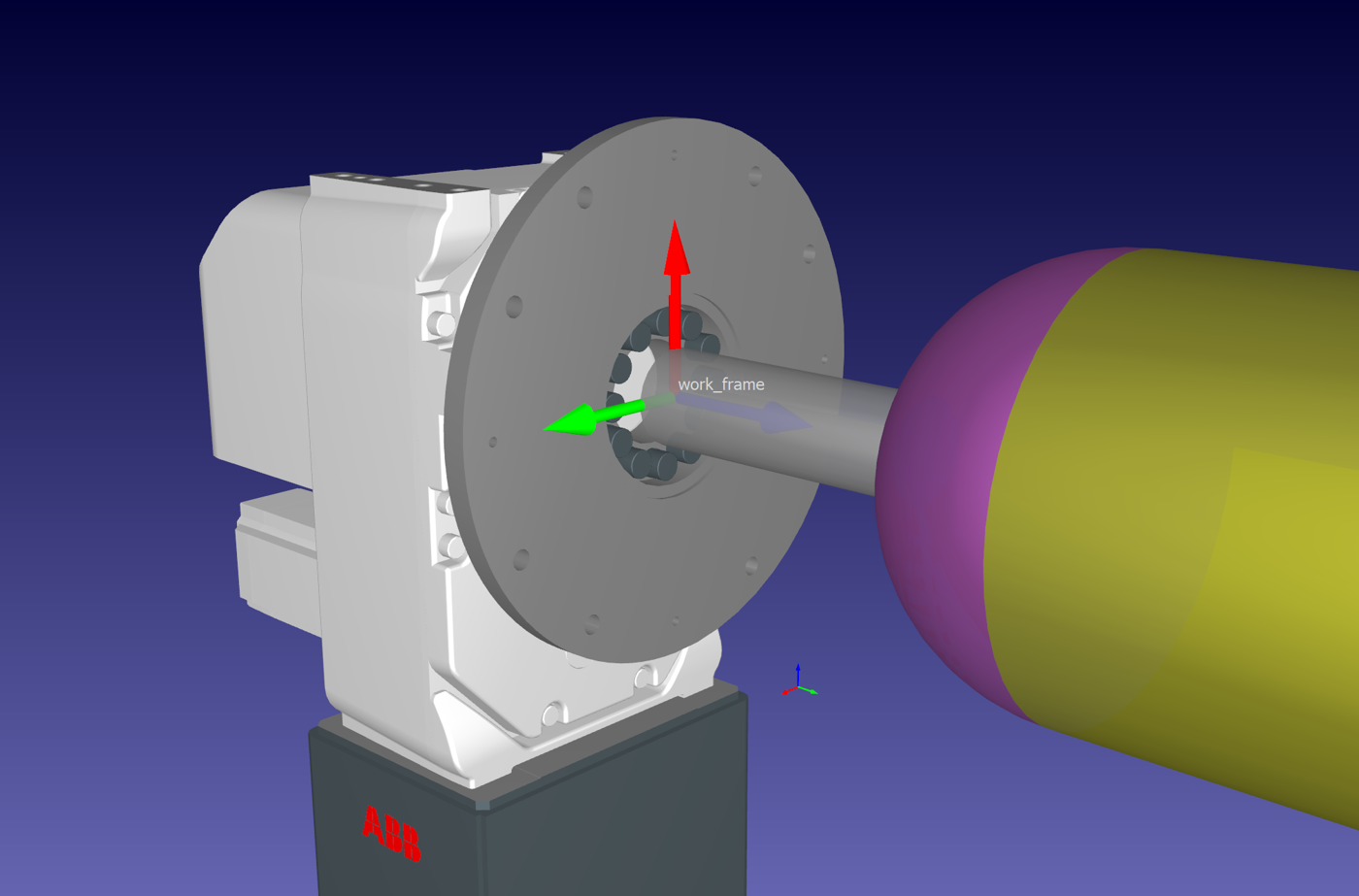
1.RoboDKでタンク取り付け用のポジショナーフランジ参照フレームを選択します。
2.Fusion360ユーティリティのRoboDKタブに移動し、モデルの読み込みを選択します。
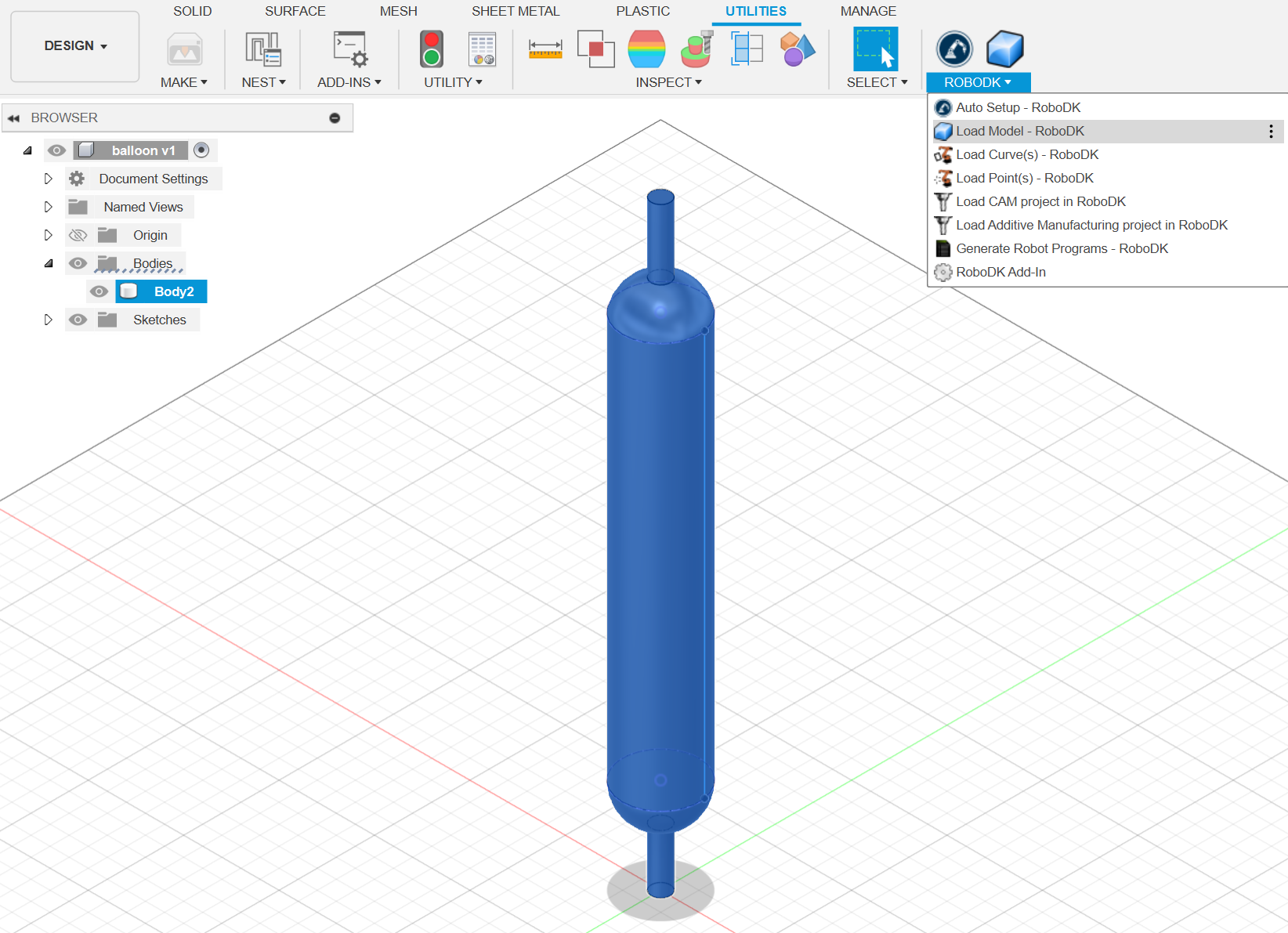
3.タンクモデルの位置を確認し、名前を変更します。
パスのインポート
モデルをインポートした後、溶接パスをインポートする必要があります。
Fusion360からパスをインポートします:
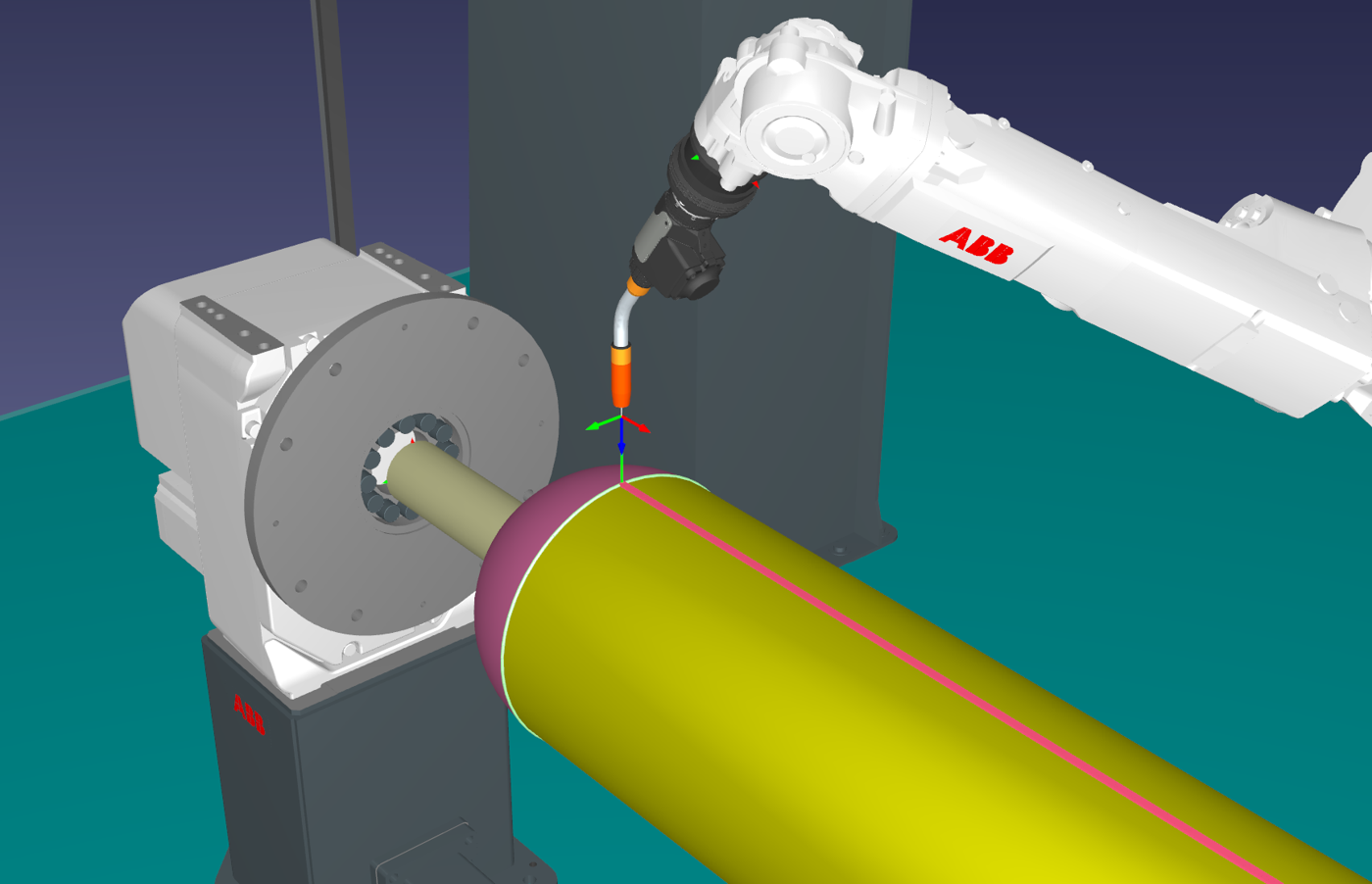
1.溶接パスを選択します。ロボットツールの方向付けに役立つので、面も必ず選択してください。
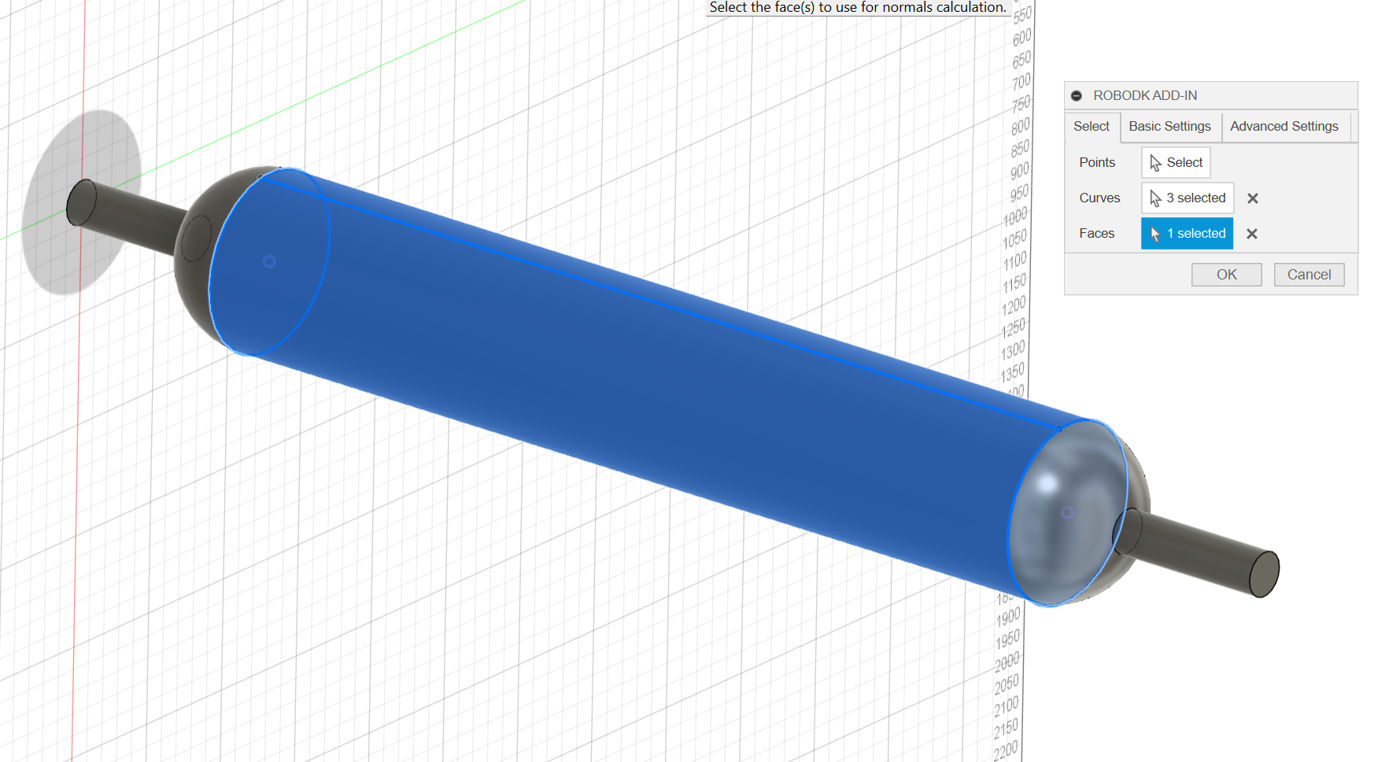
2.Fusion360からパスをインポートしたら、RoboDKに移動します。
3.パスの位置を確認し、名前を変更します。
カーブフォロープロジェクトのセットアップ
モデルと溶接パスがインポートされると、次のステップでは対応するカーブフォロープロジェクトを作成します。
1.新しいカーブフォロープロジェクトを作成します。
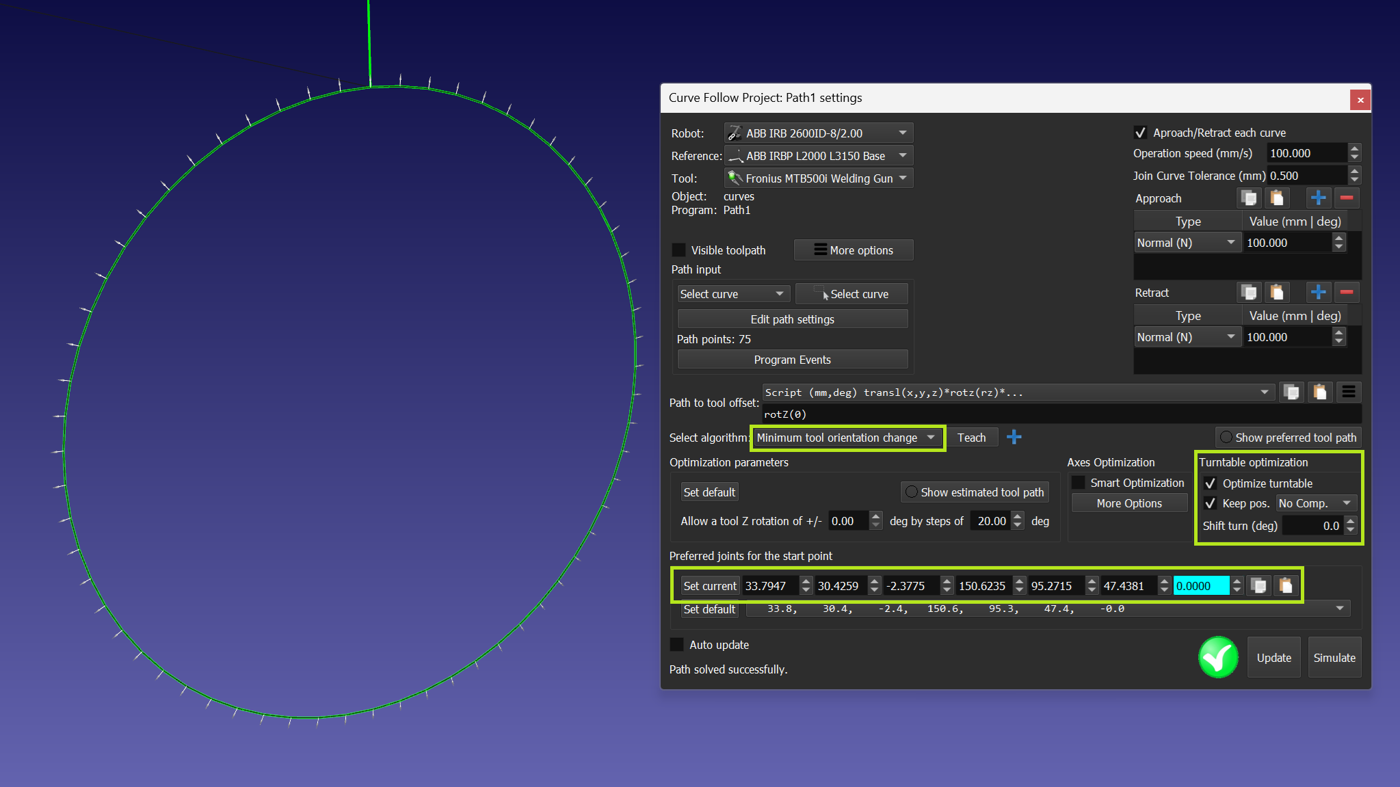
2.最初の円曲線を選択します。
3.TCPポジションを固定し、補正なしで使用します。
4.TCPの開始点と方向を明示的に設定します。
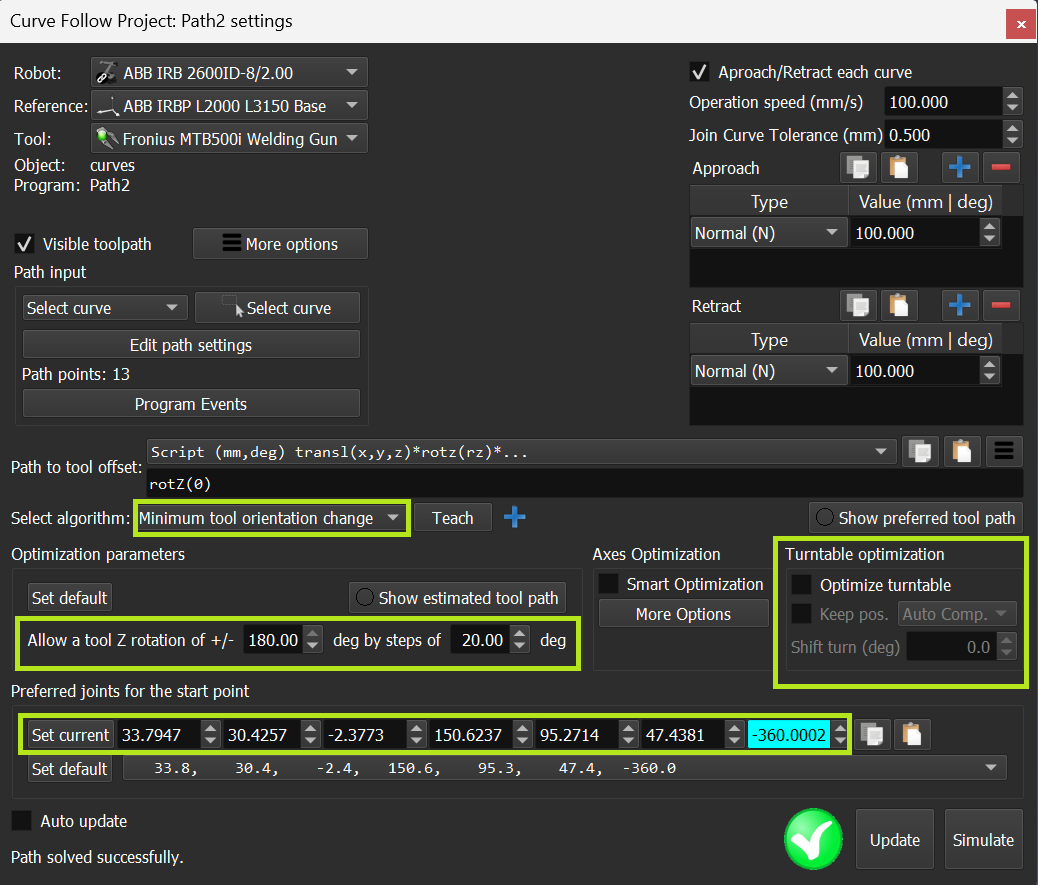
5.直線シーム用に新しいカーブフォロープロジェクト(ユーティリティ->カーブフォロープロジェクト)を作成。
6.ポジショナーの回転を使用せず、前の軌道の終点を新しい軌道の始点として明示的に設定します。
7.2つ目の円形シームの軌跡を作成し、1つ目と同じ設定を使用します。
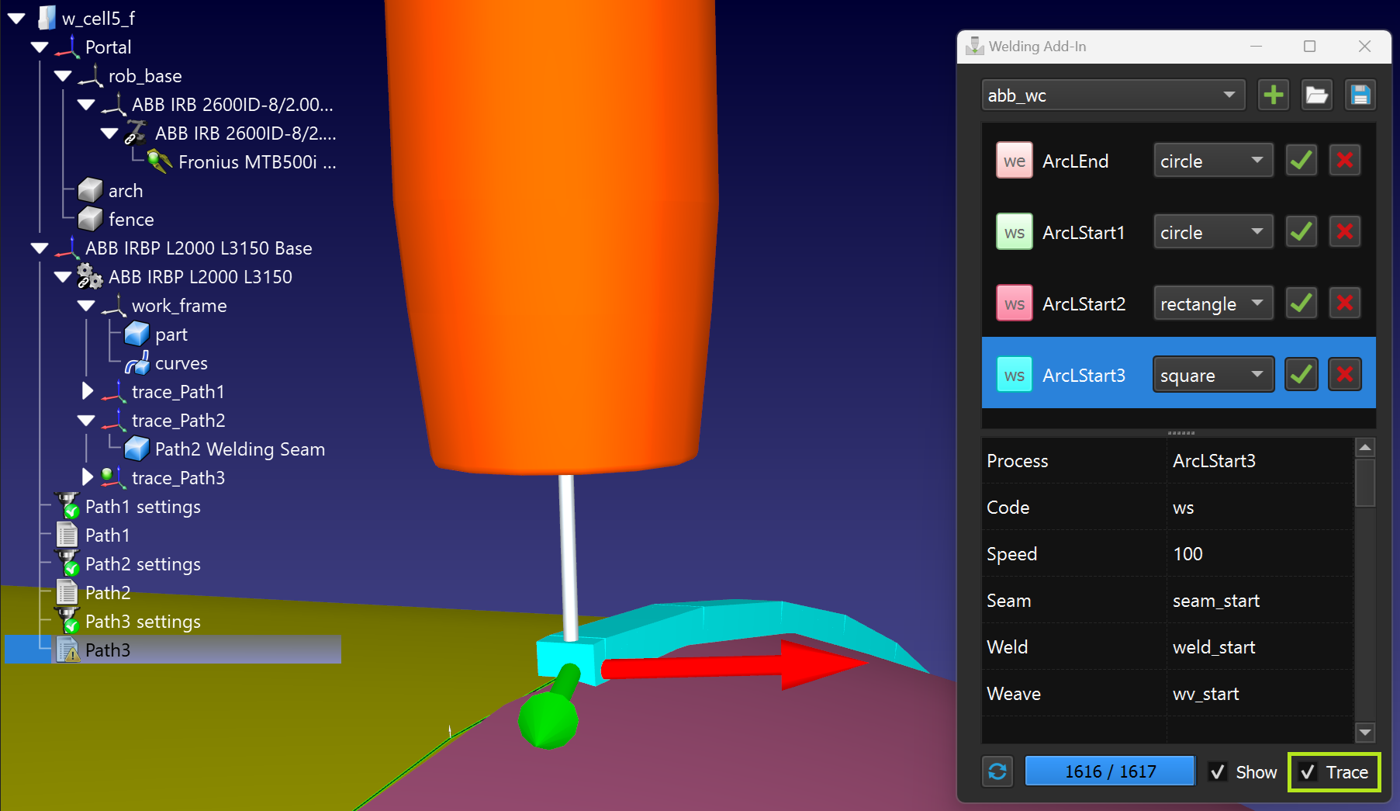
溶接アドインの使い方
このセクションでは、溶接アドインの適用と各溶接作業のカスタマイズ方法を学びます。ABBロボットの溶接指示用のテンプレートを使用します。
1.溶接アドインを起動し、使用する溶接モードを順次追加します。
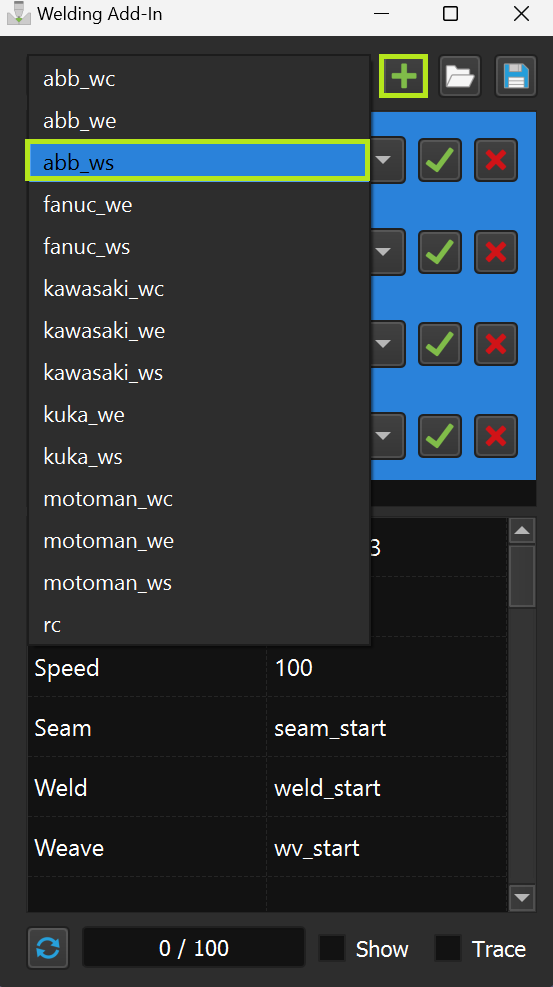
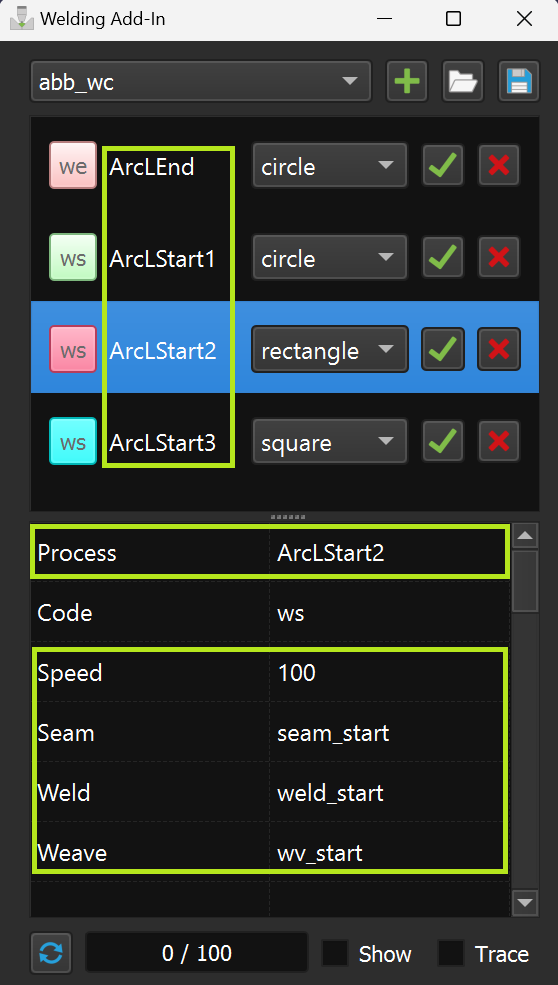
2.モード名を変更し、パラメータを設定します
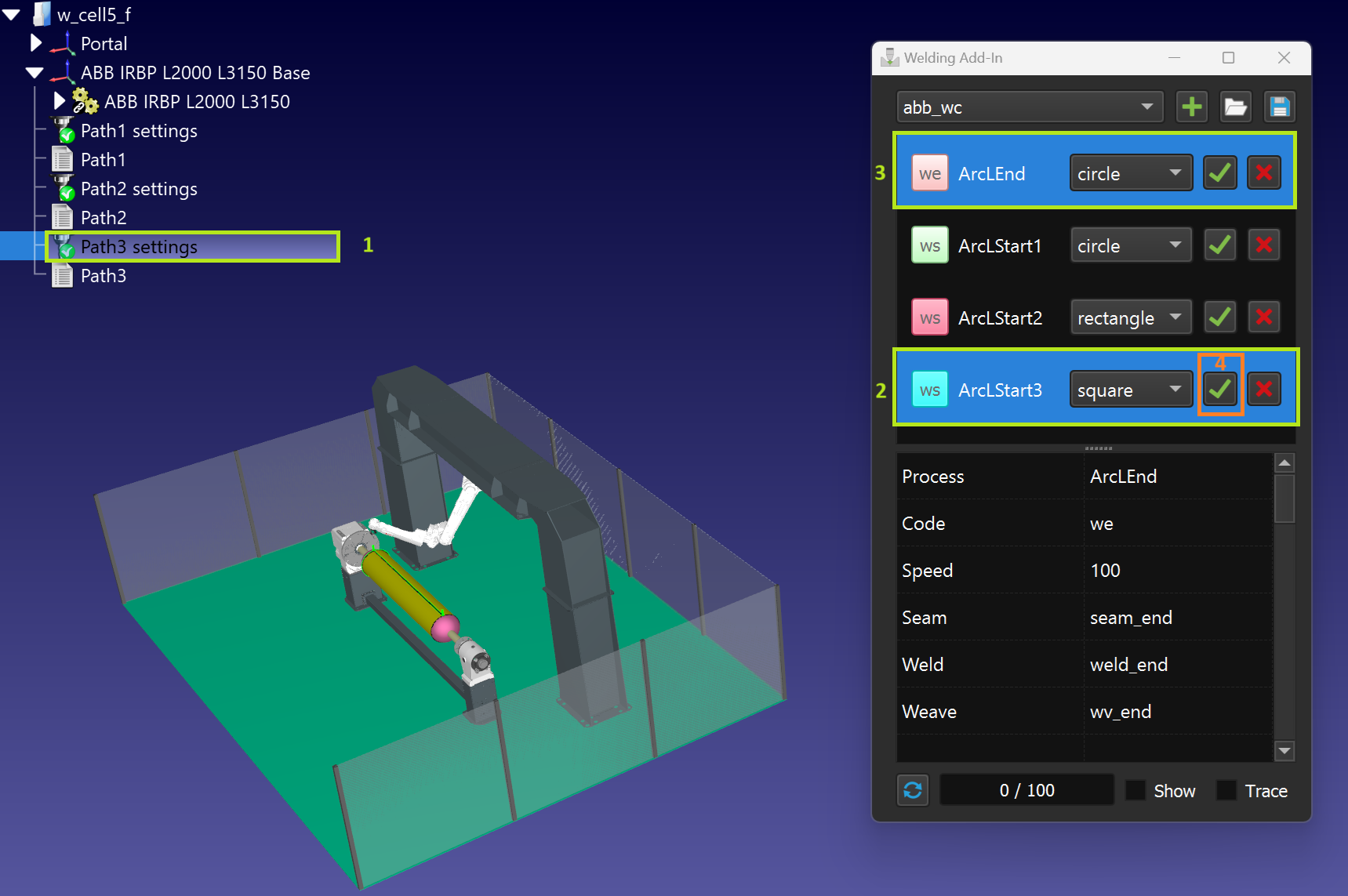
3.各カーブ・フォロー・プロジェクトで、溶接開始と溶接終了の指示を選択し、適用します(Ctrlボタンを使用)。
下のスクリーンショットの選択順序に注意してください。
4.適切なCurve Follow Projectsを選択し、キーボードショートカットのCtrl + Uを押して更新します。
5.溶接の軌跡を視覚化することができます。
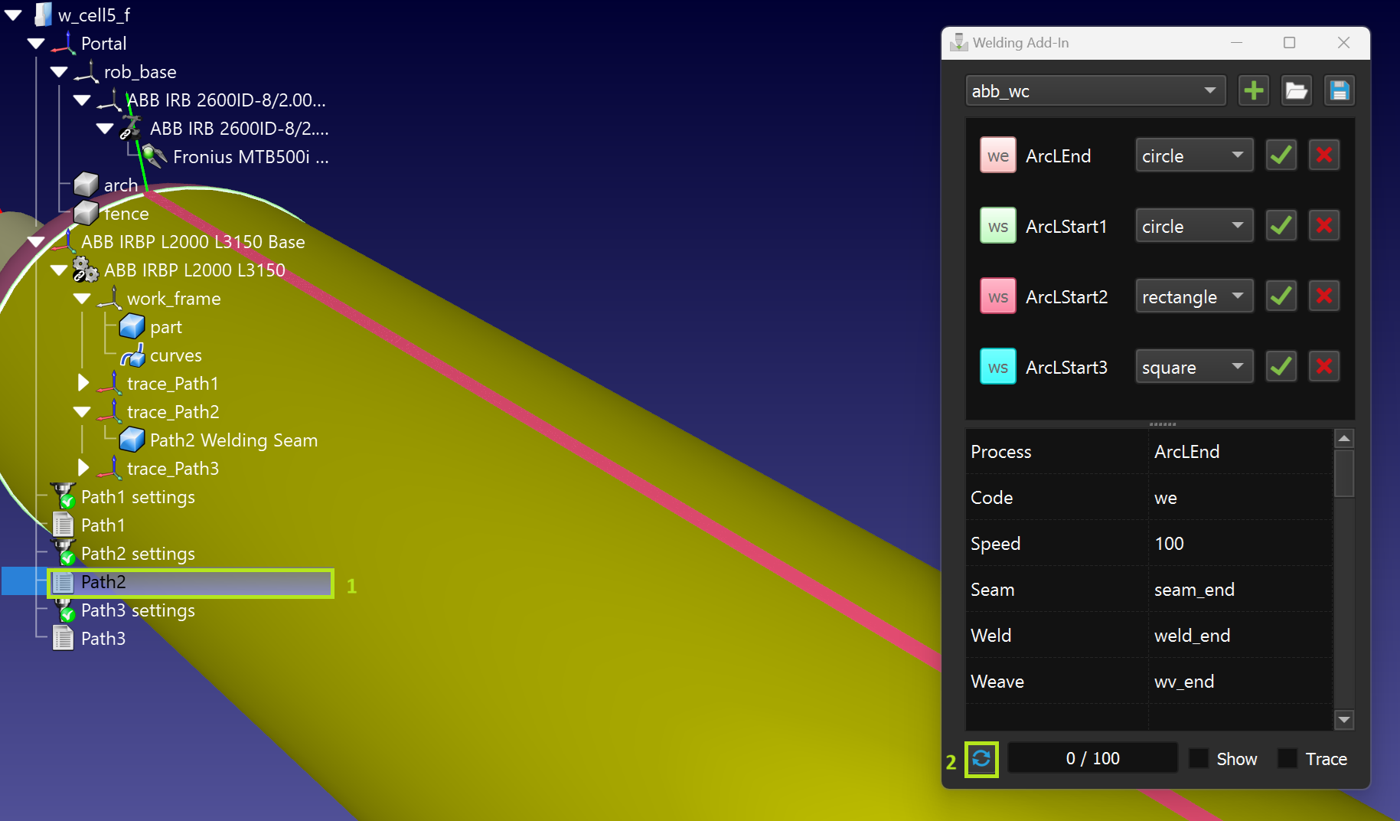
6.トレース・チェック・ボックスを使用して、プログラムの実行中に溶接材料がどのように適用されるかを評価します。
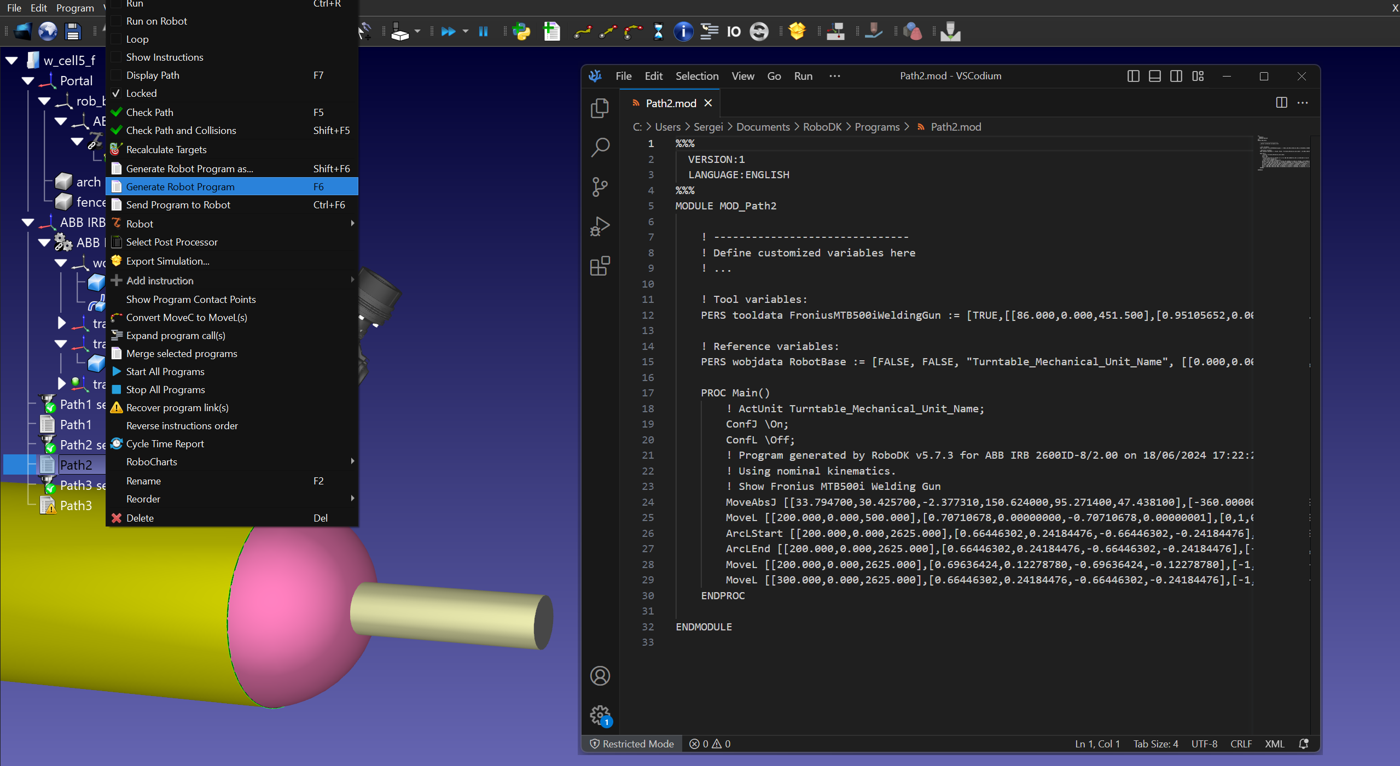
プログラム生成
適切なポストプロセッサーを選び、生成されたプログラムを溶接コマンドでチェックしてください: