Robot Welding
イントロダクション
この例題では、SolidWorks 用 RoboDK プラグインの使い方をご紹介します。この例にはテーブルと2つのアングルアイアンが含まれており、RoboDKの機能を使って溶接経路を改善する方法をご紹介します。
ビデオSolidWorksとRoboDKによるロボット溶接: https://www.youtube.com/watch?v=34A4IH7Slpk。
SolidWorks 用 RoboDK プラグインを使用すると、溶接用の産業用ロボットを簡単にプログラミングできます。この例では、テーブルと 2 つのアングルアイアンが含まれており、RoboDK を使用して溶接経路を改善する方法をご紹介します。
ヒントSolidWorks用RoboDKアドインについては SolidWorksセクションを用RoboDKアドインのご覧ください。
ロボット溶接例
このロボット溶接プロジェクトを進めるには、まずデフォルトのライブラリでRoboDKロボット溶接例を選択します。次にSolidWorksで溶接パス/スケッチを選択します。次にRoboDKでロボットパスを調整します。
セットアップ
まず、SolidWorksから部品と溶接パスをインポートします。
ヒントSolidWorksからパーツ、カーブ、ポイントをインポートする方法については、最初のビデオ(https://www.youtube.com/watch?v=mF6Fn6HxHJ8)を参照してください。
SolidWorksからプロジェクトをインポートします:
1.SolidWorksのRoboDKAuto Setupを選択します。
2.溶接パスを選択します。ロボットツールの方向付けに役立つので、面も必ず選択してください。
3.SolidWorksからパスをインポートしたら、RoboDKに移動します。
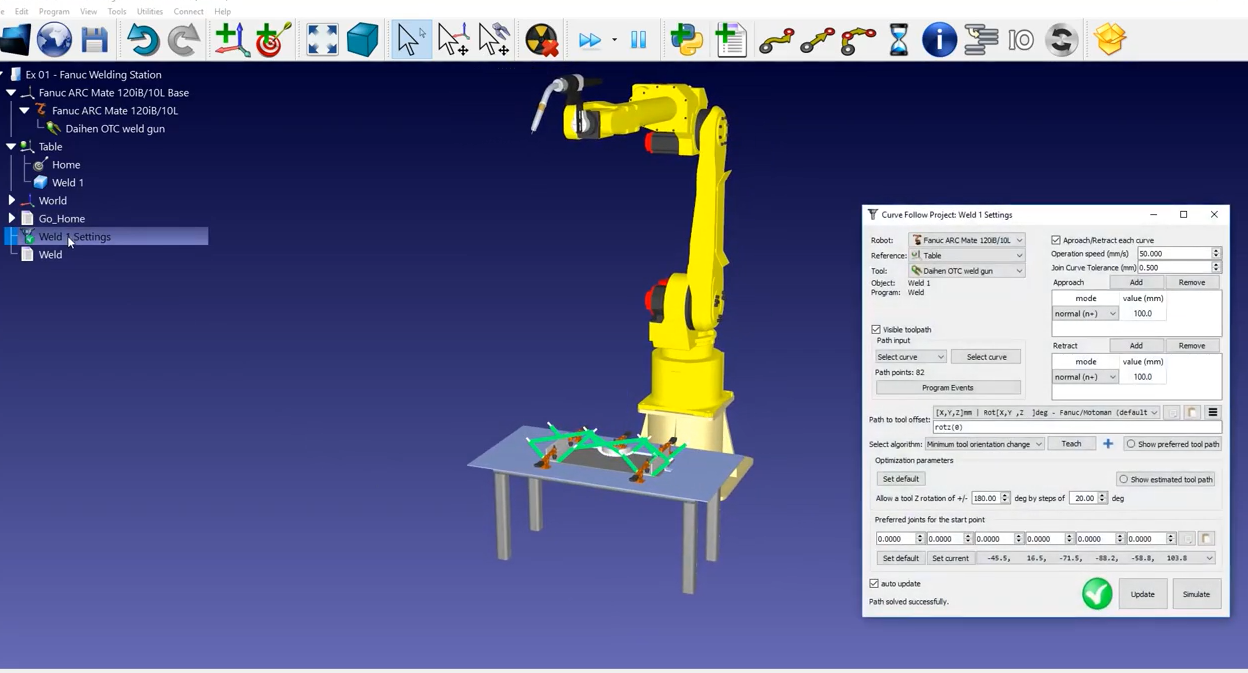
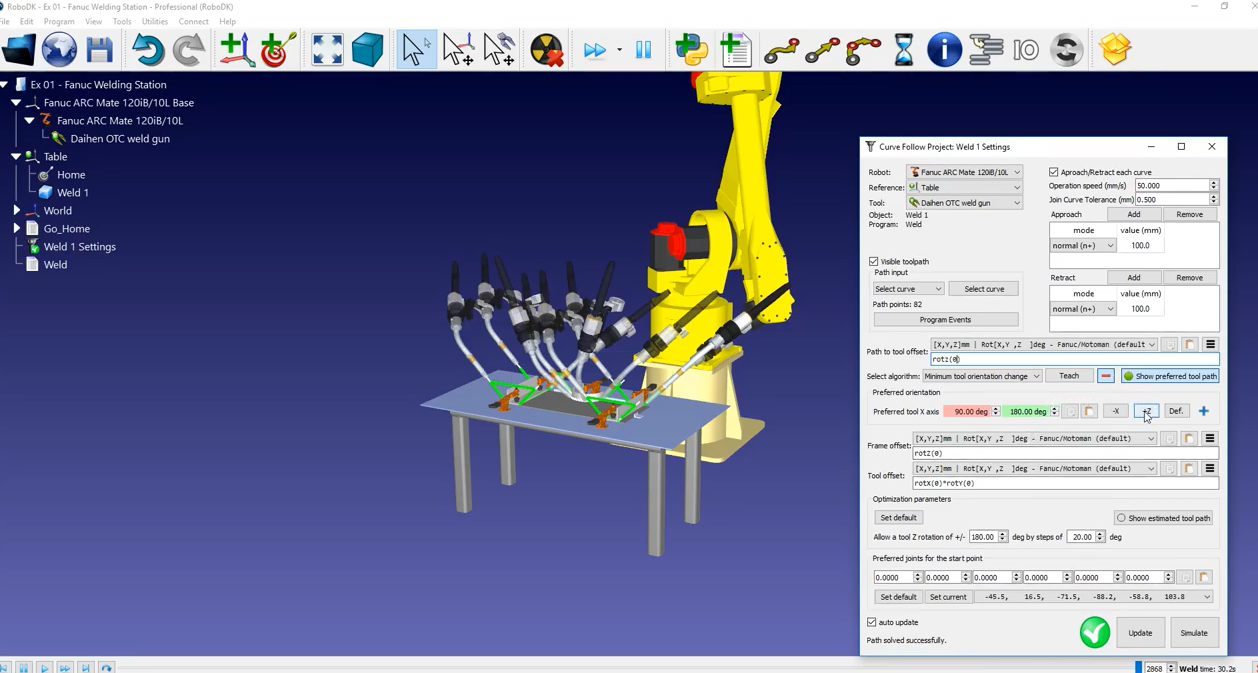
4.ステーションツリーで、Weld1 Settings をクリックし、Curve Follow Project を開きます。
5.Updateをクリックしてプログラムを生成し、Simulateをクリックします。
SolidWorksの2Dスケッチ
このセクションでは、各溶接カーブの動きの順序を改善したり、カスタマイズする方法を学びます。溶接ガンは想定されたとおりの経路をたどっています。しかし、向きが少しずれており、最適なパスからは程遠いことがわかります。
まず、パス自体を修正する必要があります:
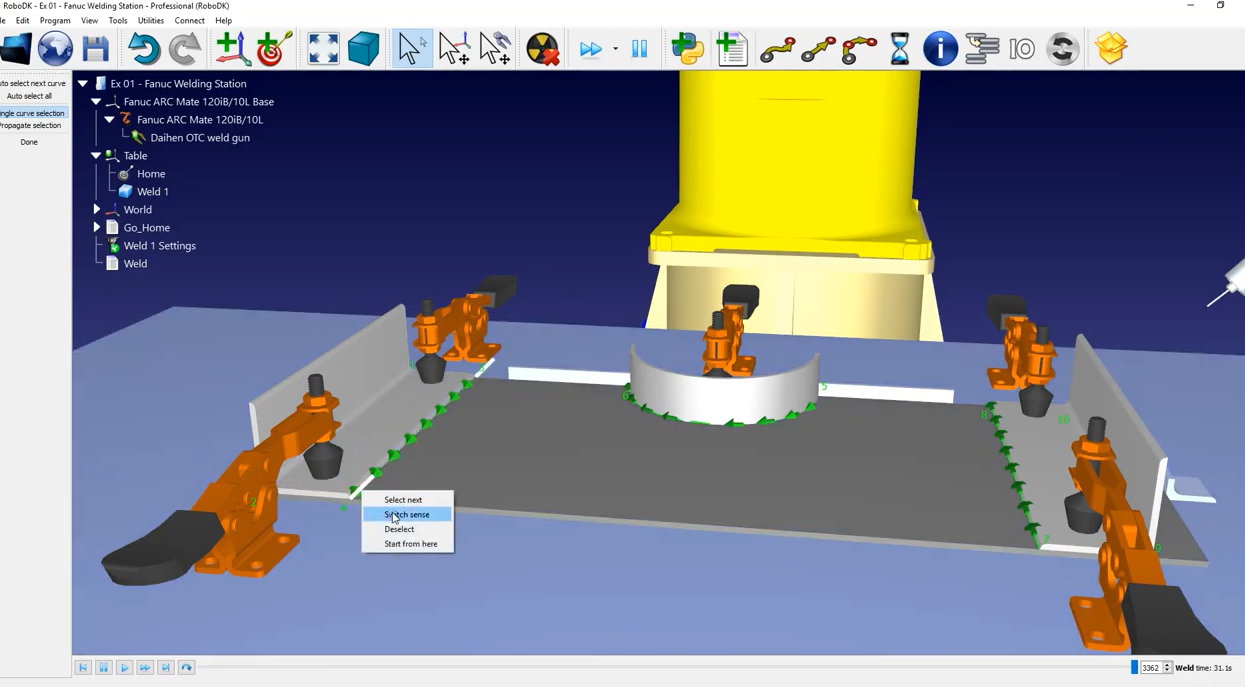
1.Curve Follow Projectで、Select Curveをクリックします(1→2、3→4、5→6、7→8、9→10)。
2.溶接部分からの順序は理にかなっています。しかし、溶接の方向は意味をなさないようです。
3.溶接パスの方向を変えるには(パス3から4など)、パスを右クリックし、「方向を逆にする」を選択します。
4.パス5からパス6、パス7からパス8についても同じことができます。
5.修正が完了したら、右側のウィンドウで「完了」を選択します。
6.Updateをクリックするとプログラムが生成され、Simulateをクリックするとシミュレーションが開始されます。
パスの順序がより理にかなっているように見えるので、ロボットの動きをより良くするために、パスに沿ってツールの向きを調整することができます。
7.カーブ・フォロー・プロジェクト]メニューで、[優先ツールパスを表示]をクリックします。様々なゴーストツールが表示され、パスに沿った様々な位置でのツールの向きが表示されます。
8.ツールの向きのオプションで最初に試すことができるのは、"Z "軸を中心とした "Path to tool offset "です。これを行うには、手動で値を入力するか、マウスをその上に持っていき、スクロールホイールを使って値を上下させます。
9.こうすることで、ゴーストツールの向きが変わるのがわかります。
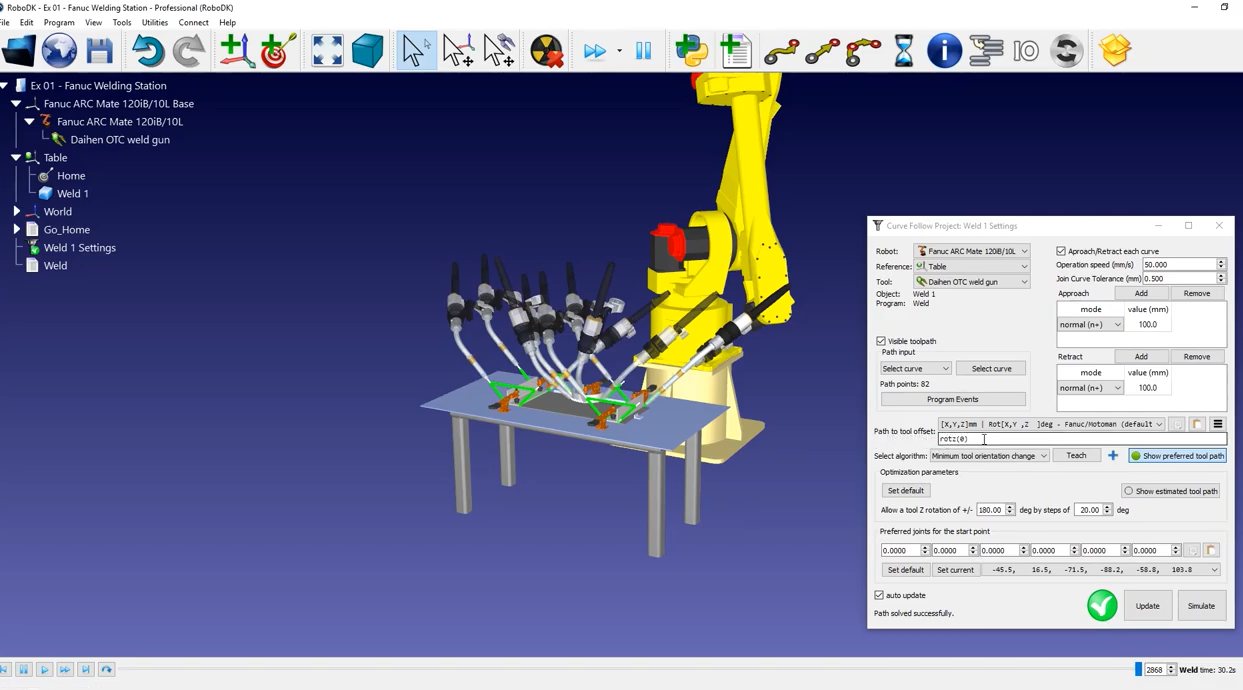
この場合、基本オプションでは問題を解決できないようです。幸いなことに、もっと多くのオプションが用意されています。青いプラスボタンをクリックしてオプションを表示し、プロジェクトに応じて変更することができます。
10.Z軸周りの回転(rotz)を元の値であるゼロに変更し、「+Z」ボタンをクリックします。
11.ゴーストツールでお分かりのように、ロボットのフランジは常にパーツの上にあります。Updateをクリックし、次にSimulateをクリックして結果をシミュレートします。
12.スクロールバーを使用する場合、新しいツールの向きはツールのケーブル管理を容易にします。
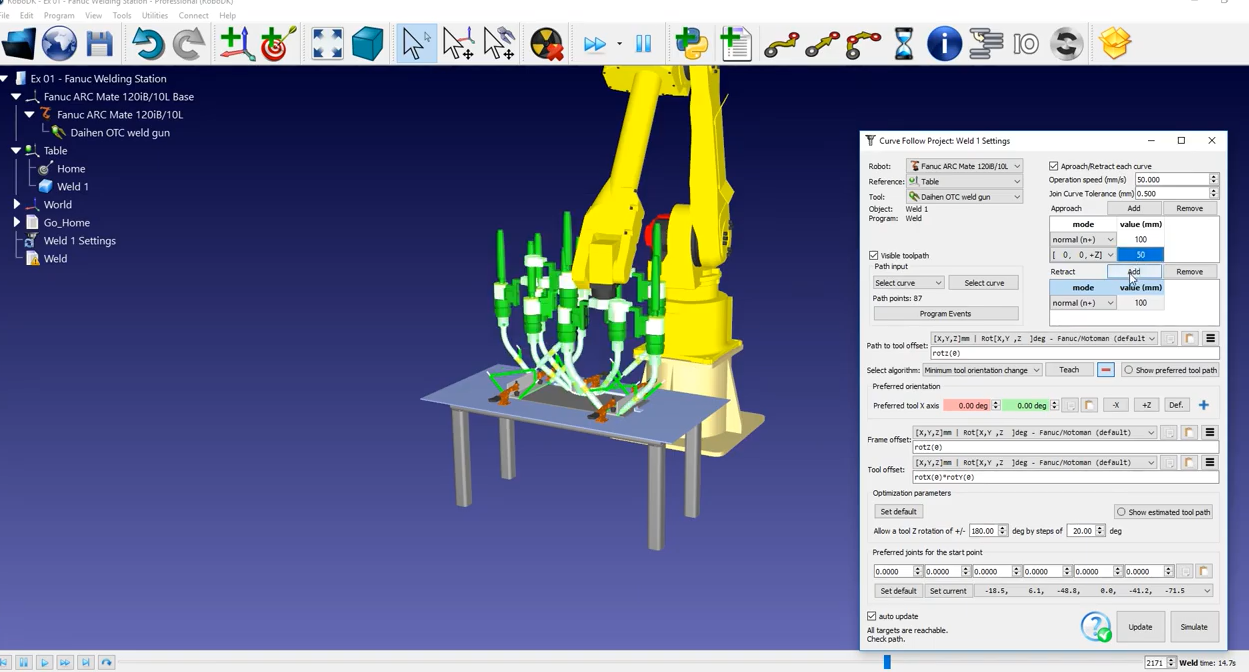
アプローチとリトラクトの動きは、ツールとワークの衝突を避けるために特に重要です。カーブ・フォロー・プロジェクトは、溶接パスごとにアプローチとリトラクトを自動的に作成します。デフォルトでは、これらの動作は長さ100 mmで、溶接パスの法線上にあります。
衝突を避けるために、長さを200mmに変更し、同じ向きを保つことができます。
あるいは、座標系のZ軸に沿ったアプローチの動きを追加することもできます:
1.デフォルトのノーマルアプローチ100mmに戻してください。
2.例えば、Zに沿った動きを追加します。
3.50mmに設定してください。
4.完了したら、更新とシミュレーションを押してください。
5.これで、ロボットは溶接経路に対して垂直に後退し、その後、まっすぐ上に伸びます。