ツールの定義(
ロボットツール、またはツールの中心点(TCP)は、ロボットを直交座標(XYZWPRの値が指定された直交座標ターゲットなど)に移動する為の点です。TCPは、ロボットフランジからの変換として定義されます。TCPを適切に定義することは、オフラインプログラミングかどうか関係なく、ロボットアプリケーションに重要です。
次の手順を辿って、ロボットツール(ツールの中心点またはTCP)を定義または調整します:
1.ユーティリティ➔
2.定義/調整するツールを選択してください。
または、ツールを右クリックして、
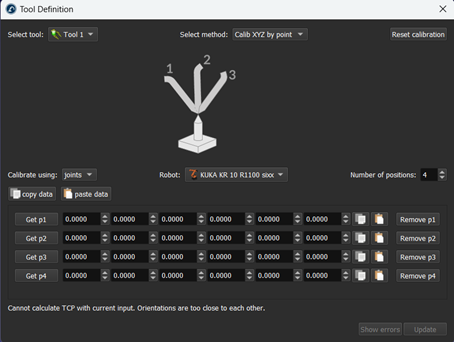
3.調整方法を選択してください:
a.さまざまなツールの方向で、TCPの先端で一点にタッチさせる(点座標でXYZを調整)
b.さまざまなツールの方向で、TCPで平面をタッチさせる(平面でXYZを調整)。TCPは、点または球体にすることができます。
メモ:異なる方向で同じ点をタッチする(最初の方法)は、ほとんどのロボットコントローラーがティーチペンダントで利用できる方法です。RoboDKを使用して、TCP誤差をよりよく理解しましょう。
メモ:球体の中心を計算する必要がある場合は、平面を使用してTCPを定義することをお勧めします。この方法は、タッチプローブの中心を自動的に取得します。
4.関節値を使用したTCPの調整がデフォルトの設定です。直交座標ターゲットがある場合は、ポーズに変更してください。
重要:TCPがポーズを使用して定義されている場合、ロボットフランジの位置は、ロボットの土台または参照系に対するポーズ(位置と向き)として提供する必要があります。これらの値を提供する方法の詳細については、参照系項目へ。
ヒント:TCPを適切に定義または調整する為に、3つ以上の構成を使用することが可能です。これにより、より正確な結果が得られ、TCP誤差を適切に推定できます。TCPを正確に定義するには8点以上の使用、そうでない場合は3点を使用することをお勧めします。
5.複数のロボットが利用可能な場合は、ロボットを選択してください。
6.TCPの調整に使用する点の数を調節してください。この値は後から変更することもできます。
7.測定した構成(関節の値またはフランジの位置と方向)でテーブルに入力してください。
ヒント:構成のリストは手動で、またはコピー/貼り付けボタン(各行の右側)を使用して入力できます。
重要:各関節の値は少なくとも4つ小数を指定する事をお勧めします(関節の値を指定する場合)。許可される少数位は、ツール➔設定➔最大少数位で変更できます。
ヒント: P1を取得を選択して、実際のロボットからRoboDKに現在の関節値を取得することもできます。ロボットドライバーが適切に設定されていれば、PCにこの位置を簡単に取得できます。詳細については、ロボットドライバー項目へ。
重要:提供される値の個別のコピーを保持することをお勧めします。データをコピーとデータを貼り付けを選択して、すべてのコンテンツのコピー/貼り付ができます。
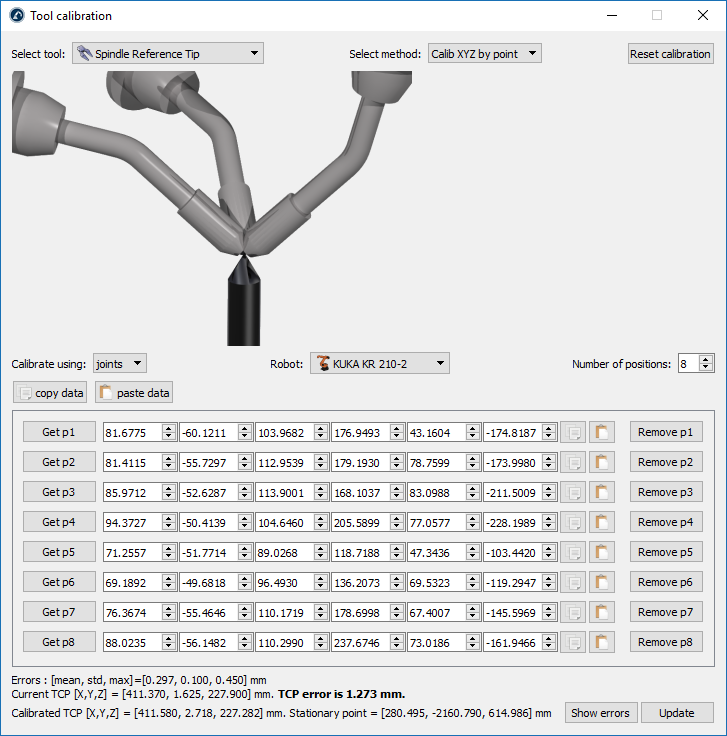
8.最後に、更新を選択して、選択したRoboDKプロジェクトで新しいツールの位置を適用します。
メモ:値を入力すると、新しいツール(TCP)は自動的に計算されます。
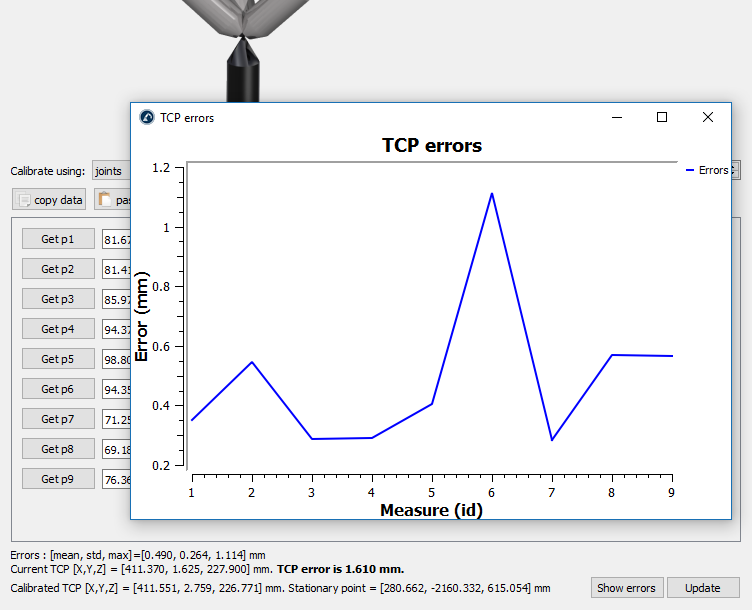
ヒント:いくつか有用な誤差の統計は、平均誤差、標準偏差(std)、および最大誤差として提供されます。計算された平均に対する各点の誤差を図表で表示するには、誤差を表示を選択します。この方法には多くの手動操作が含まれるため、特定の点で誤差が発生することがよくあります。これらの誤差を分離する為に、平均よりも大きな誤差を示す点を削除する事ができます。
例として、次の画像は、P6を削除のボタンを選択する前の点6の誤差を示します。