1
この手順を辿って、1軸ターンテーブルを調整します:
1.ユーティリティ➔
2.定義/調整する参照系を選択します。
または、参照系を右クリックして、
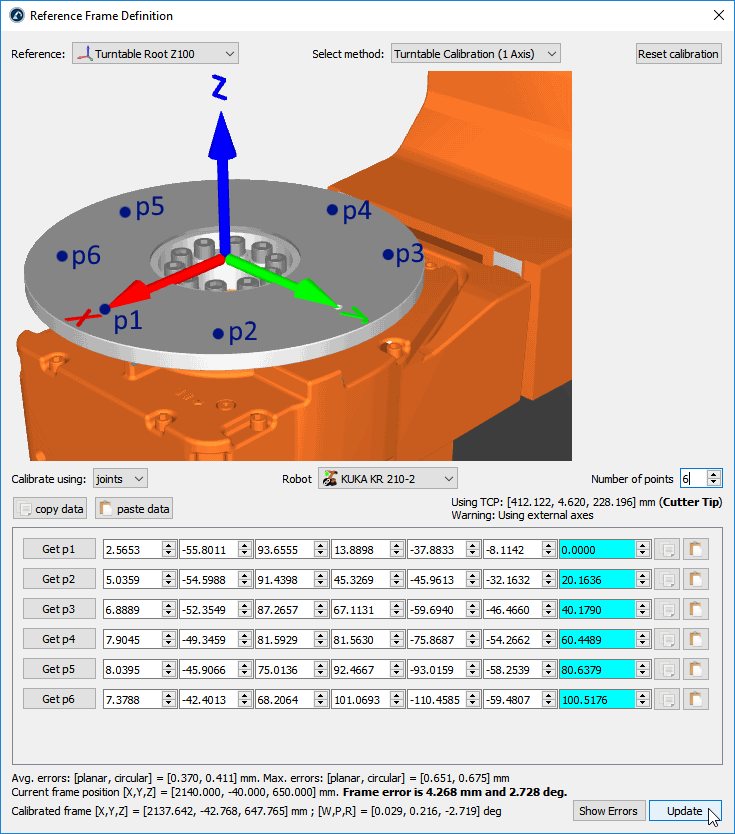
3.調整方法ターンテーブル調整(1軸)を選択します
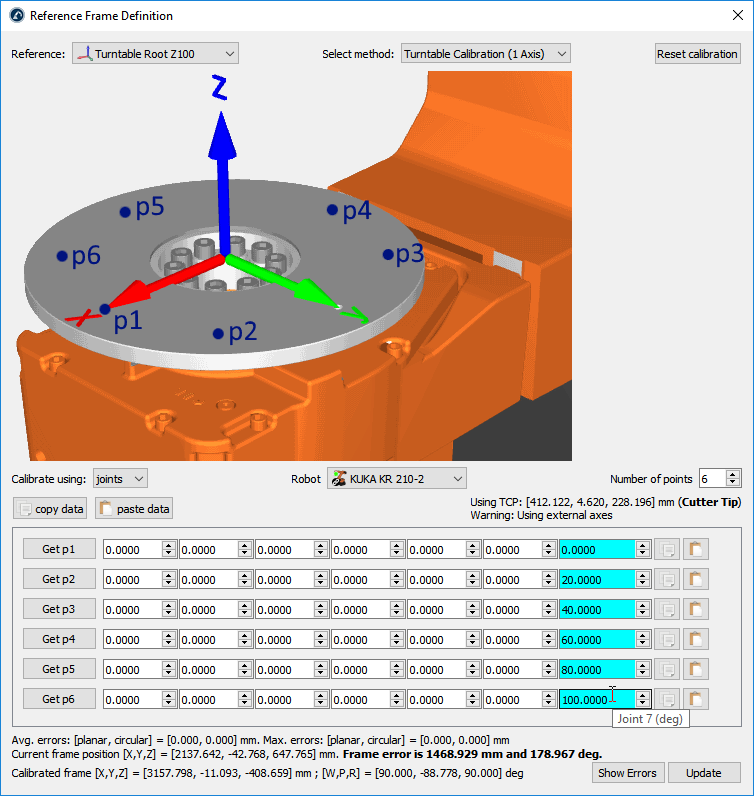
4.関節を使用して調整を選択します(デフォルトの設定)。ロボット土台の座標系に対して各点のXYZ座標が分かる場合は、点にも変更できます。
5.プロジェクト内で利用可能なロボットが複数ある場合は、ロボットを指定してください。
6.取得したい点の数を選択します(最低で点は3つ必要です)。
重要:ターンテーブルを動かすと同時に、ロボットを使ってターンテーブルの同じ点を探ることを勧めます。ターンテーブルは、正の回転方向に動かす必要があります(前の画像で示す用に)。ターンテーブルの移動に伴う誤差をよりよく理解するために、最低6〜10点を使用することをお勧めします。
重要:最初の点は、ターンテーブルのX軸を定義します(スタティックな参照)。
重要:調整された参照系のXY平面は、円弧/円によって印された平面と一致します。平面の点を取らなかった場合、このオフセットを調整する必要があるかもしれません。例えば、ターンテーブルのルートを表す為に、調整された参照系にネストされた新しい参照系を追加することができます。
7.ロボットの関節位置(または点)でテーブルに入力してください。
ヒント:構成リストは、手動またはコピー/貼り付けボタン(関節値の右側にあるボタン)を使用して入力できます。
ヒント: ロボットに接続している場合は、「Get p」ボタンを選択して、直接ロボットから関節の値が取得できます。接続のセットアップの詳細については、ロボットドライバー項目へ。この機能はすべてのロボットが使用できるわけではなく、ロボットの製造者から追加のソフトウェア設定が必要になる場合があります。
重要:手動で入力する場合、各関節の値は少なくとも小数点を4つ指定することをお勧めします(関節値を指定する場合)。許可される少数位の数は、ツール➔設定➔最大少数位で変更できます。
メモ:更新を選択すると、RoboDKは提供されたデータのコピーをRDKプロジェクトに保存します。
8.最後に、更新を選択して、RoboDKプロジェクトで選択した参照系に新しい位置を適用します。
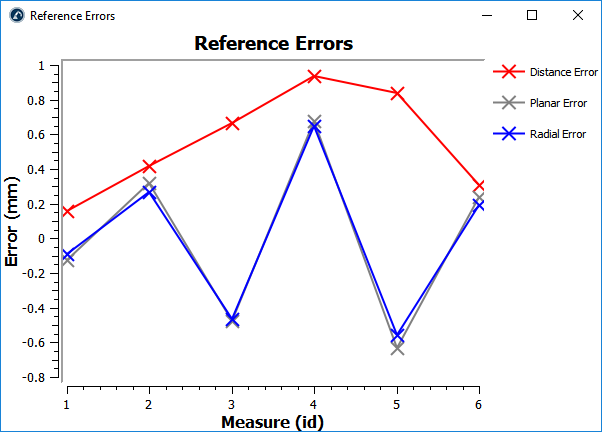
9.誤差を表示を選択して、各点の誤差レベルを表示します(距離の誤差は、平面と放射状の誤差を組み合わせたものに相当します)。