1
この例では、1つの軸でターンテーブルの作成方法を表示します。
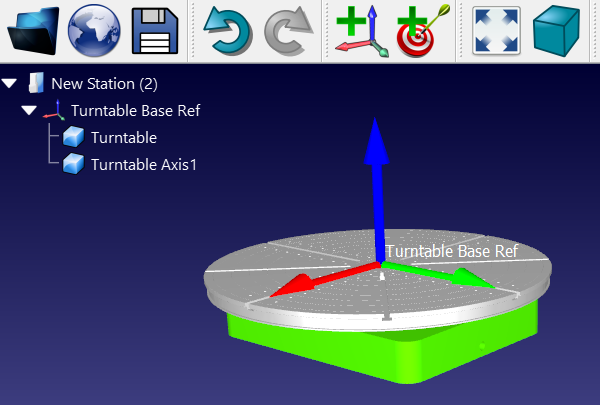
1.プログラム➔参照系を追加を選択。
2.参照系を選択し、F2を選択して、ターンテーブルの土台 参照に名前を変更します。
3.ターンテーブルの3Dモデルを読み込む:3DモデルをRoboDKウィンドウにドラッグアンドドロップしてください(STL、STEP、IGESファイルなど)。
重要:ターンテーブルの各可動部分は、RoboDKで個別のオブジェクトである必要があります。オブジェクトを右クリックして分割を選択する事で、オブジェクトをサブオブジェクトに分けられます。複数のオブジェクトを選択してマージする事で、それらを一つのオブジェクトにグループ化する事もできます。
重要:ターンテーブルの作成を簡単にする為、参照系のZ軸(青い軸)が移動/回転軸に沿って配置する事をお勧めします。
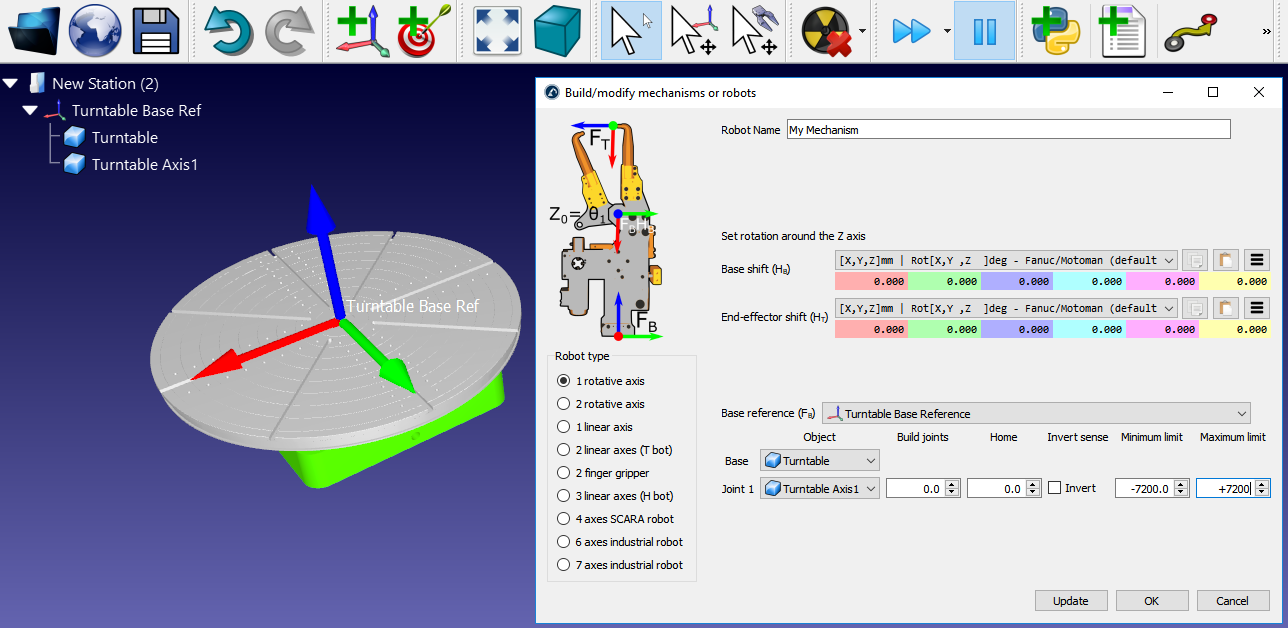
4.ユーティリティ➔モデル機構またはロボットを選択。
5.1回転軸を選択します。
6.参照系とオブジェクトは自動的に入力されます。自動選択が正しくない場合は、それに応じて更新できます。
7.関節の制限が更新できます。例えば、+/-20ターンが必要な場合は、+/-7200度が入力できます。ロボットパネルの関節制限ラベルをダブルクリックして、後から関節の制限を変更することもできます。
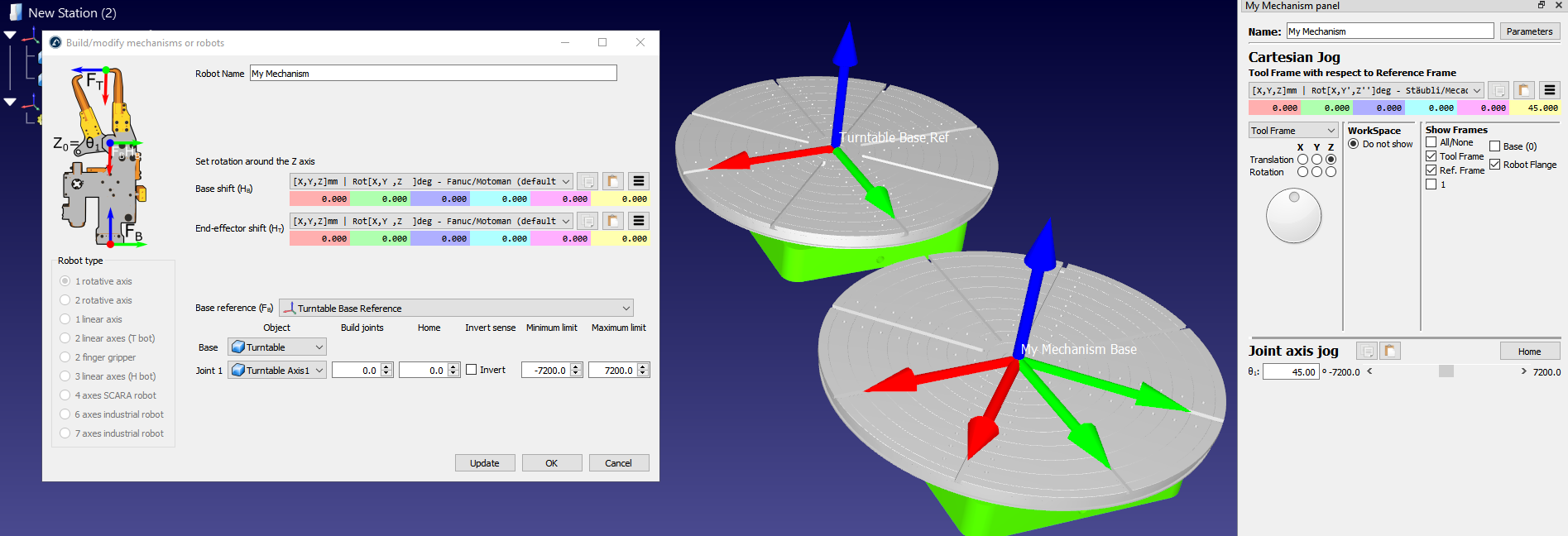
8.更新を選択して機構を生成します:新しい機構が表示されます。
9.OKを選択してメニューを閉じるか、必要に応じてターンテーブルに変更を追加します。
10.メカニズムの作成に使用した元のオブジェクトファイルは削除できます。機構はRDKプロジェクトと共に保存され、外部との依存関係は必要ありません。
メモ: 参照系が右上の画像の土台の参照(Fb)と一致しない場合は、相応の変換を土台シフト(Hb)として入力する必要があります。新しい参照系を追加して、ツール➔測定ツールを使用して座標系を特定の場所に配置する事もできます。
ヒント: 1軸調整手順に従って、ロボットに対してターンテーブルを正確に配置します。