3D
RoboDKは、STL、STEP(またはSTP)、IGES(またはIGS)形式などの、ほとんどの標準の立体データをサポートしています。他の形式のWRML、3DS、OBJなどもサポートされています(MacおよびLinux版では、STEPおよびIGESはサポートされていません)。
新しい3Dファイルを読み込むには、次の手順を辿ってください:
1.ファイル➔
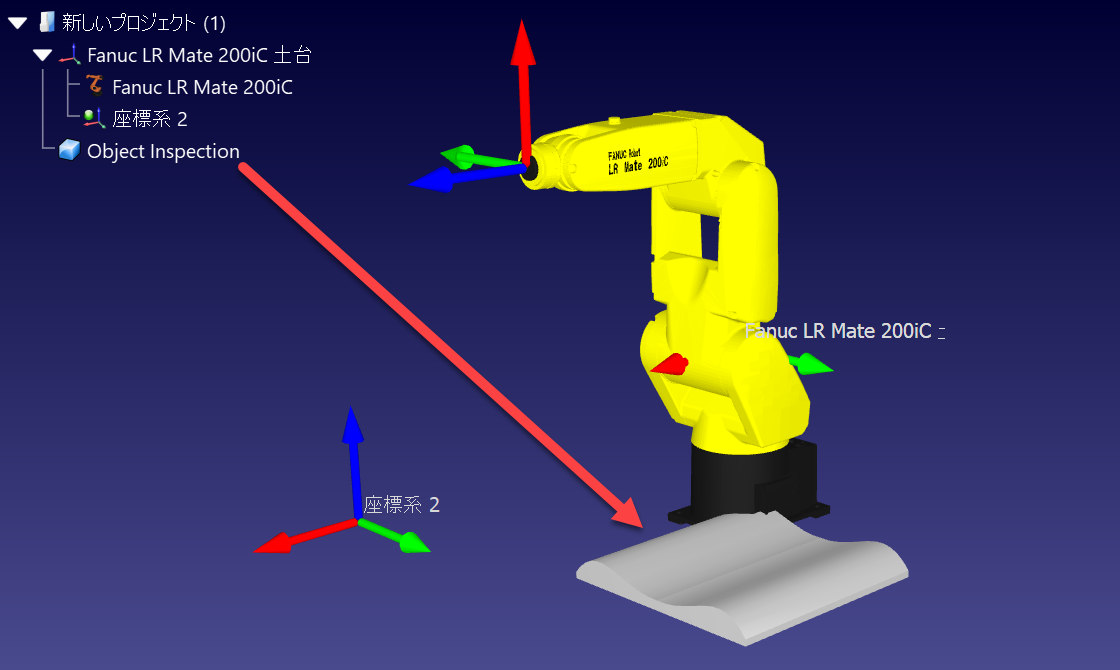
2.RoboDKのデフォルトライブラリにあるオブジェクトObject Inspectionを選択してください:
C:/RoboDK/Library/Object Inspection。
3.または、ファイルをRoboDKのメイン画面にドラッグアンドドロップして、自動的にインポートできます
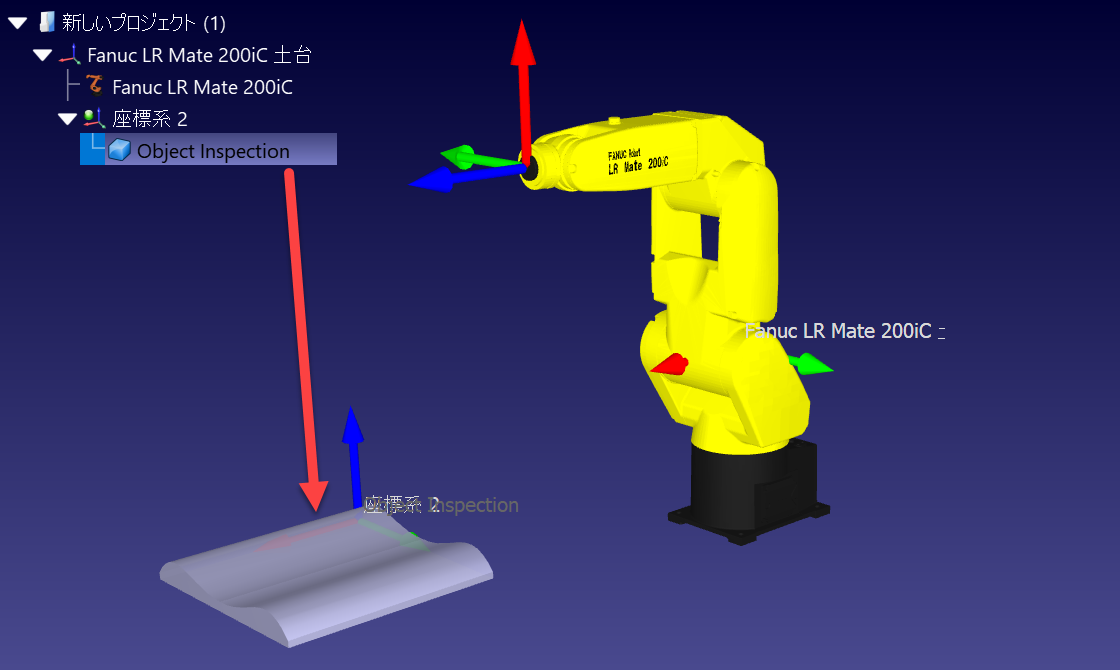
4.参照系の座標系2にオブジェクトをドラッグアンドドロップしてください(プロジェクトツリー内)。
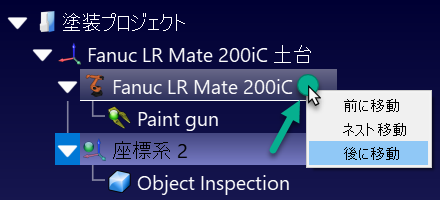
ヒント:右クリックを押したままオブジェクトをドラッグアンドドロップして、ツリー内のアイテムを並べ替えます。
ビデオ:オブジェクトをインポートしてツールを作成する方法:https://www.youtube.com/watch?v=ilmJSD-a9bs&list=PLjiA6TvRACQd8pL0EnE9Djc_SCH7wxxXl&index=5。
重要: オブジェクトに対してターゲットを記録させるには、オブジェクトを参照系にネストさせるのが重要です。それで、参照系を移動させると、ターゲットもオブジェクトと一緒に移動します。
ヒント:大きなSTEPファイルまたはIGESファイルは、以下を選択することでインポート速度を加速できます:ツール➔設定➔CAD➔高速インポート設定。詳細については、STEP / IGES項目へ。
ヒント:オブジェクトは、関係性をもっている参照系に対して移動出来ます(オブジェクトをダブルクリックして座標を入力することにより)が、指定された参照系に対しての位置を維持し、代わりに参照系を移動することをお勧めします。これにより、ロボットコントローラとの間の参照系を更新するだけで、オブジェクトへの参照を適切に合わせることができます。