接近プログラムの追加
次の手順を辿って、ホームターゲットから接近ターゲットに移動するプログラムを作成します:
1.メニューからプログラム➔
2.プログラムの名前を接近移動に変更します。
3.ホームターゲットを選択してください
4.プログラム➔
使用しているツールの座標系と参照系をロボットに伝える為に、2つの指示が自動的に追加されます。
メモ: ターゲットが選択されていない場合は、ロボットの現在地に新しいターゲットが作成されます。
5.接近ターゲットを選択してください
6.プログラム➔
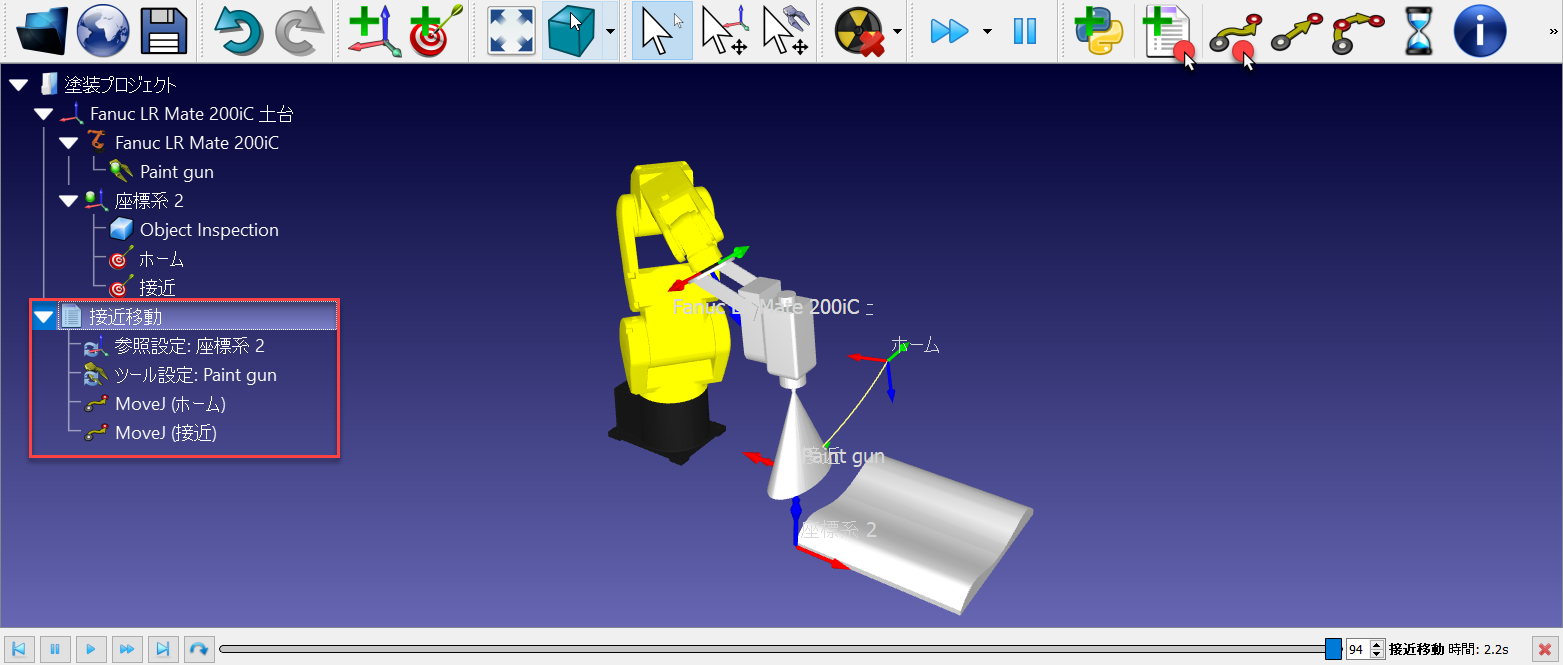
接近移動プログラムをダブルクリックすると、プログラムのシミュレーションが実行されます。シミュレーションバーと推定サイクルタイムが表示されます。