相対
別のツールに対してツール(TCP)を参照することができます。例えば、特定のスタンドオフを定義したり、または参照系かツールホルダーに対してカッターを配置したりできます。
これらの手順では、2番目のTCPを最初のTCPに対してZ軸に沿って150 mmの位置に追加する必要がある事を想定しています:
1.ロボットを右クリック
2.
3.この新しいTCPをダブルクリックしてください
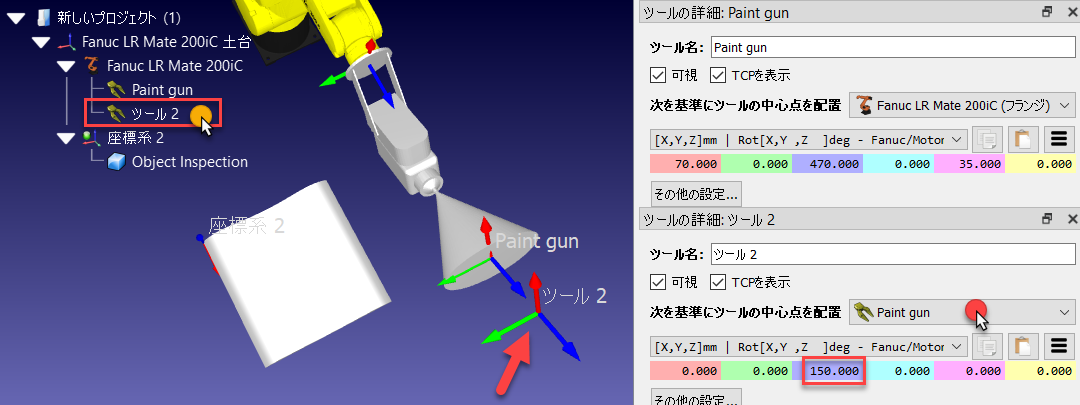
4.次を基準にツールの中心点を配置➔ペイントガンを選択してください
5.座標Zを150 mmに入力し、他の位置と回転を0に設定してください。
この項目で定義されたTCPに対するこの新しいTCPは、次の項目では削除されます。