はじめに
ロボットの位置はターゲットとして記録されます。デカルトターゲットは、座標系に対するツールの位置を定義します。関節ターゲットは、ロボットの関節の値を指定してロボットの位置を定義します。
次の手順を辿って、2つのターゲットを新しいホームターゲットおよび接近ターゲットとしてそれぞれ作成できます:
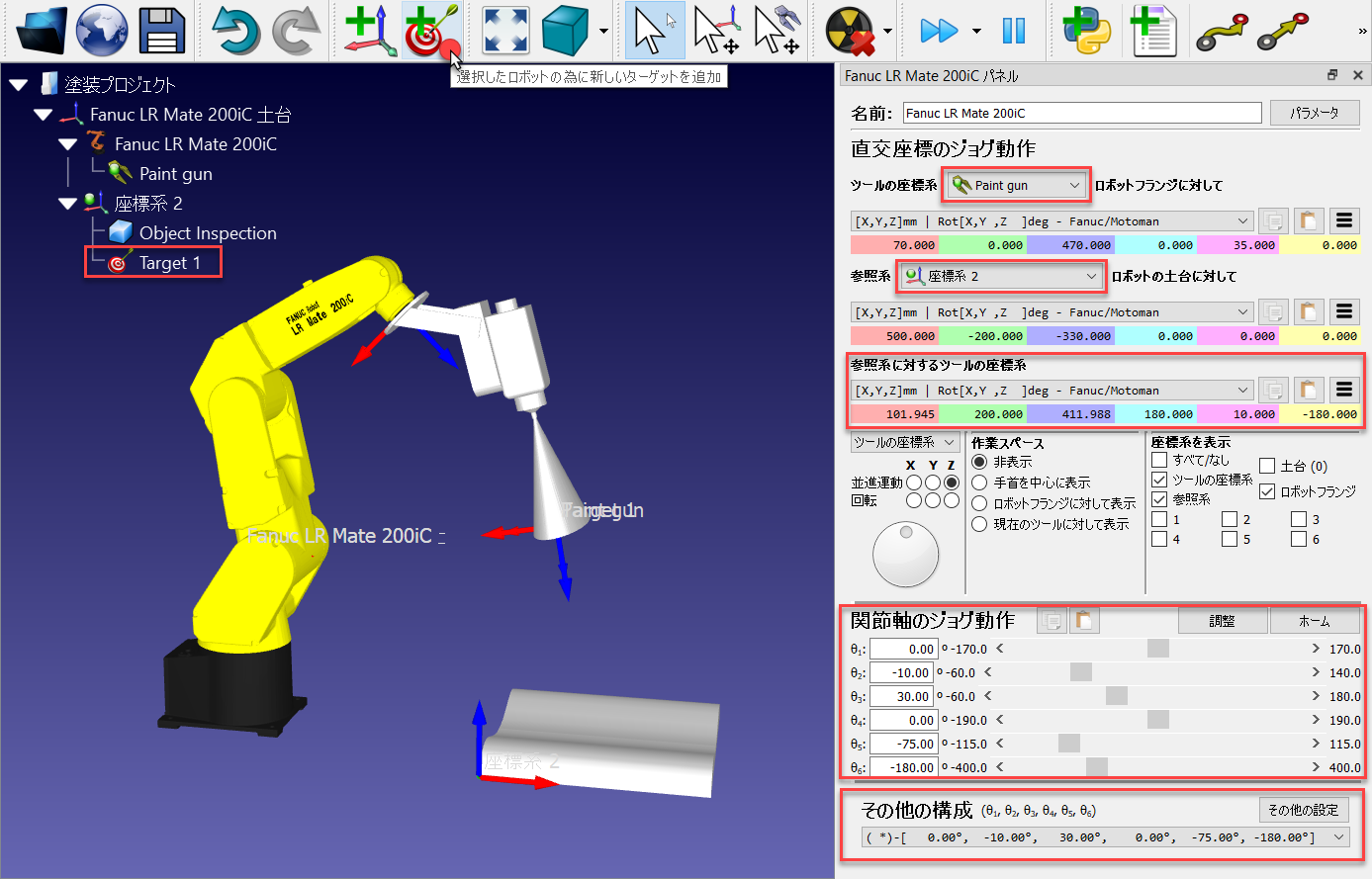
1.ロボットをダブルクリックしてロボットパネルを表示させます
2.ペイントガンをツールの座標系として選択してください。ツールまたは参照系が有効になると、ツリーのアイコンに緑色の点が表示されます。
3.座標系2を参照系として選択してください
4.Altキーを押したまま、TCPまたはロボットフランジを通してロボットを安全な位置にドラッグし、オブジェクトとの衝突がないようにします。または、参照系を基準にツールの座標系(TCP)の座標を移動してください。
5.その他の構成の部分で、様々なロボットの構成に切り替え、ロボットの軸が制限に近づいていないことを確認できます。
6.プログラム➔![]() ターゲットを教える(Ctrl + T)を選択、またはツールバーにある同様のボタンで(画像を参照に)。ターゲットは有効な参照系との関係を持って配置され、現在のロボットの位置を自動的に記録します(デカルト軸と関節軸)。
ターゲットを教える(Ctrl + T)を選択、またはツールバーにある同様のボタンで(画像を参照に)。ターゲットは有効な参照系との関係を持って配置され、現在のロボットの位置を自動的に記録します(デカルト軸と関節軸)。
この例では、最初のターゲットに使用されるロボットの関節座標は:[0, -5, 35, 0, -75, -180]度です。これらの関節の値をテキストからコピーして、ロボットパネルの関節軸ジョグで同様のボタンを使用して貼り付け![]() ることができます。
ることができます。
7.F2を押して、最初のターゲットの名前をホームに変更します。または、ツール➔アイテムの名前を変更を選択してください。
8.ロボットをパーツの一つの端っこに近づけます(Altキーを使用してツールをドラッグするか、座標を入力するか、軸を手動でジョグして)
この例では、次の直交座標[0,0,200,180,0,180]を使用しました。
9.プログラム➔![]() ターゲットを教える(Ctrl+T)を選択するかツールバーの同様のボタンで新しいターゲットを作成してください
ターゲットを教える(Ctrl+T)を選択するかツールバーの同様のボタンで新しいターゲットを作成してください
10.ステップ7で示したように、ターゲットの名前を接近に変更します。
11.ホームターゲットと接近ターゲットを交互に選択して、2つのターゲットの間を移動するロボットが確認できます。
12.一つのターゲットの為に別の位置を記録する必要がある場合は、ターゲットを右クリックして、現在の位置を教える(Alt+ダブルクリック)を選択してください。
13.ターゲットを右クリックして![]() ターゲットの設定…(F3)を選択しますと、次の画像で示すようにターゲットの設定ウィンドウが開きます
ターゲットの設定…(F3)を選択しますと、次の画像で示すようにターゲットの設定ウィンドウが開きます

必要に応じて、異なる値を指定してターゲットを定義してください。