ロボットターゲット
ロボットターゲットは、特定のロボットの位置を記録して、その位置への移動を可能にします。
次の手順を辿れば、新しいターゲットを追加し、ターゲットに関する詳細の確認ができます:
●プログラム➔
これにより、有効な参照系

●ターゲットを右クリックし、設定…(F3)を選択して、記録されたポーズと関節の値が確認できます。
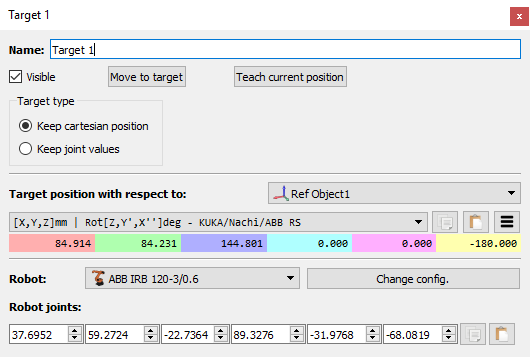
新しいターゲットを作成すると、現在のロボット軸だけでなく、デカルト空間の参照系に対してTCPが記録されます。RoboDKはデフォルトで、直交座標ターゲットとしてターゲットを作成します(直交座標を記録
一方、関節空間でターゲットを指定することも可能です(関節値を記録
関節ターゲットを作業スペースに近づく為に使用するのが一般的な方法です。次に、ツールパスが変更されないように直交座標ターゲットを使用します。これにより、参照系またはツールの座標系が変更されてもツールパスには影響がありません。
ヒント: ターゲットへ移動を選択すると、ツリーまたは3Dビューでそのターゲットを選択するのと同じ効果があります。
ロボットで同じポーズに到達する別の構成を見ることが可能です。詳細については、次の項目へ。