OPC UA
こちらの例ではRoboDK ステーションでOPC UAクライアントを立ち上げ、OPC UAサーバーをアクセスします。
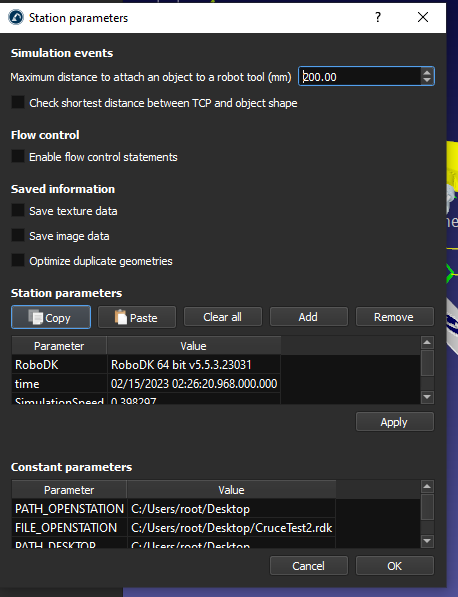
Note:既存のステーションにある古いステーションパラメータを削除できます。ステーションのルート位置を右クリック>Station Parametersをクリックします。
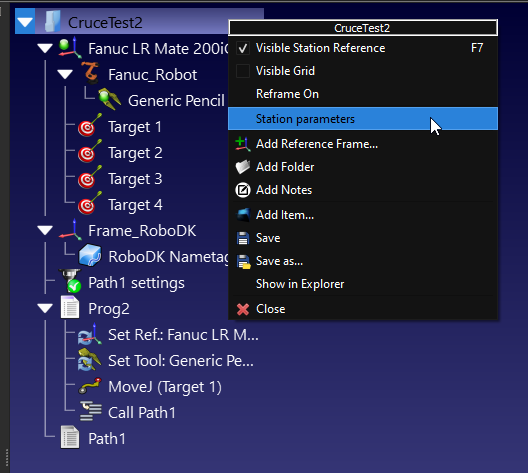
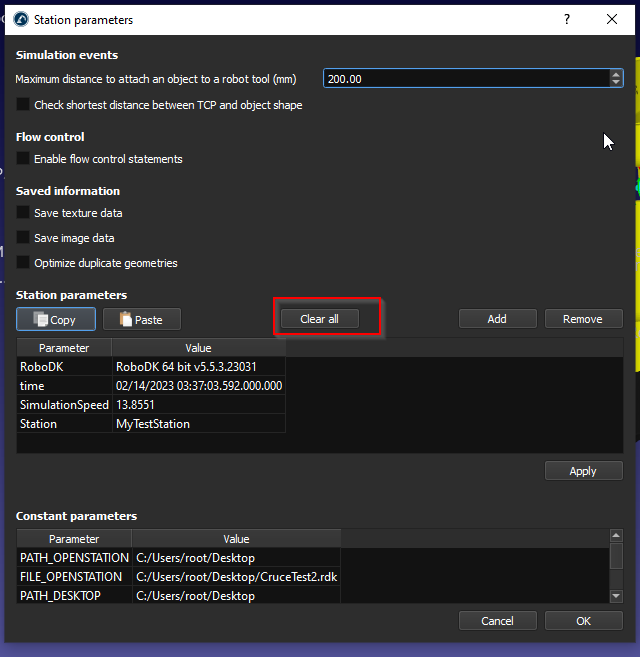
既存のステーションにあるパラメータが表示され、“Clear All”ボタンでをクリックして全てのステーションパラメータを削除します。
OPC UAクライアントインタフェース実装
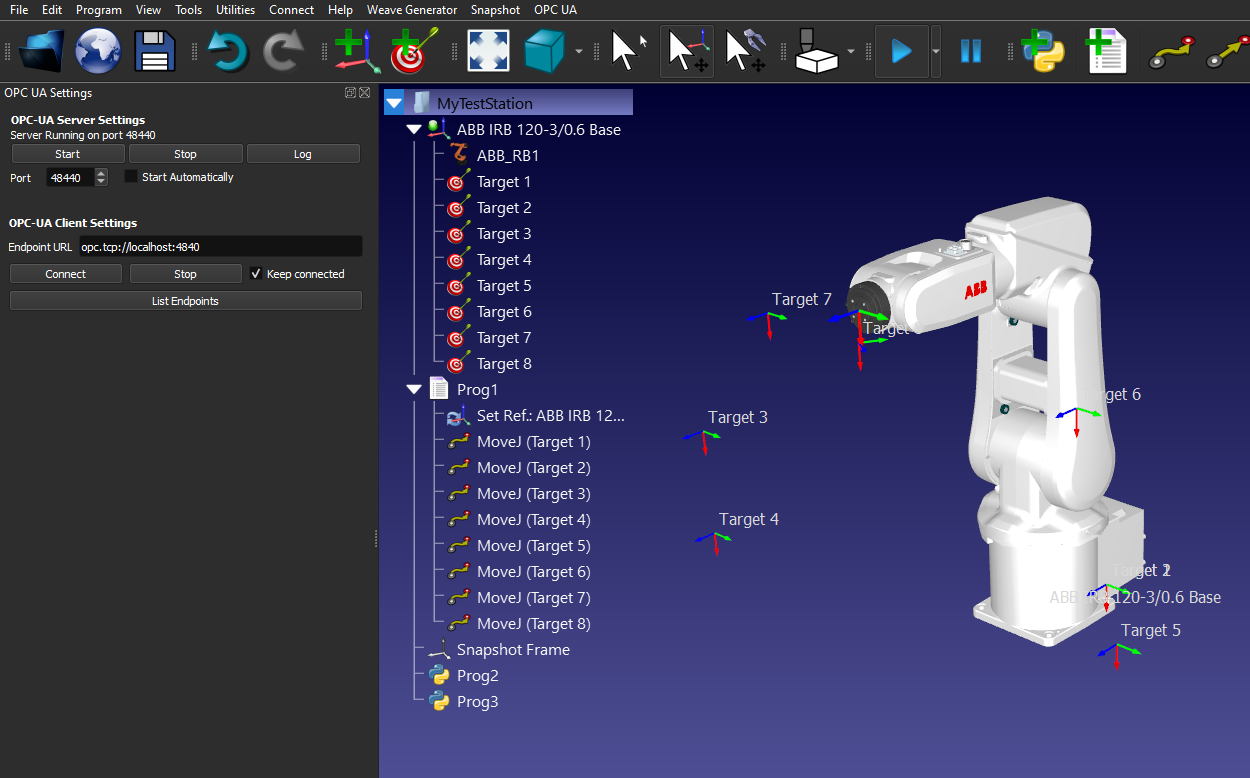
RoboDKステーションの中にOPC-UAサーバーを立ち上げます。
OPC UAクライアント追加
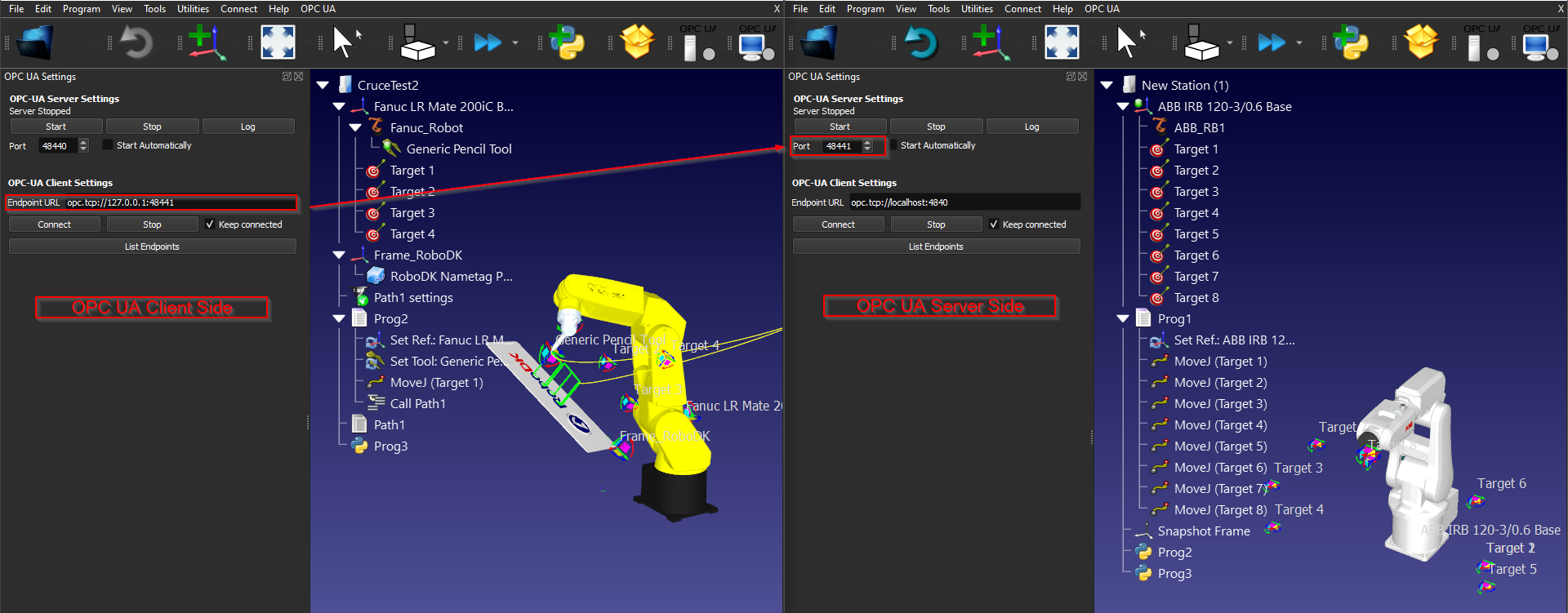
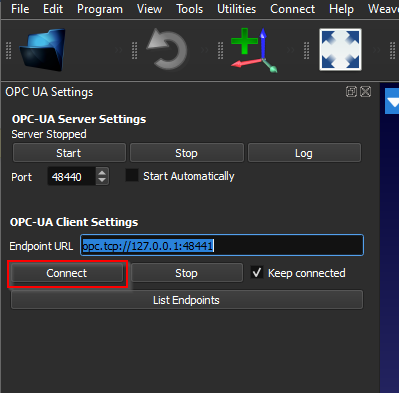
こちらのセクションではOPC UAクライアントを追加する方法を説明します。エンドポイントURLでOPC UAサーバのURLを入力してください。例えば:opc.tcp://127.0.0.1:48441(ポート番号とIPアドレスはアプリケーションに合わせてください)
ConnectボタンをクリックしてOPC UAサーバと接続します。Server variables retrieved. Right Click the station item and select ‘Station parameters’ to see the variablesが表示すれば、OPC UAサーバの接続は成功しました。
ステーションを右クリッククリックし>Station Parametersをクリックします。

ノード
各ノードの情報はnodesセクションから確認できます。
RoboDK APIの実装
OPC UAサーバからノードデータを取得でれば、RoboDK-Python APIからそれらのデータをアクセスできます。
インストレーション
こちらのリングからRoboDK-Python APIの詳しい情報を確認できます。
https://robodk.com/doc/en/PythonAPI/intro.html#how-to-install
もしかくは手動でrobodkパッケージをインストールします。
pip install robodk
スクリプト
こちらの例ではRoboDK Python APIからステーションパラメータをアクセスする方法を紹介します。
from robodk import robolink # RoboDK API
RDK = robolink.Robolink()
from robodk import * # RoboDK API
from robolink import * # Robot toolbox
itemlist = RDK.ItemList()
if itemlist:
# Get all Station Parameters
print('Vaild Paramaters are configurated in your Station..')
StationParameters=RDK.getParams()
for StationParameter in StationParameters:
print("Station Parameters %s : %s"%(StationParameter[0],str((StationParameter[1]))))
else:
print('No Parameter list..')
スクリプトの実行結果は以下になります。
Vaild Paramaters are configurated in your Station..
Station Parameters RoboDK : RoboDK 64 bit v5.5.3.23031
Station Parameters time : 02/14/2023 03:58:29.191.000.000
Station Parameters SimulationSpeed : 13.8551
Station Parameters Station : MyTestStation