レイヤーデザインの作成
パレタイジングレイヤーを使用すると、パレットの各レイヤーにオブジェクトをどのように配置するかを設計し、好みのレイアウトを適切に定義できます。
以下の手順に従って、レイヤーのレイアウトを作成してください:
1.レイヤータブに移動し、レイヤーデザインを作成します。
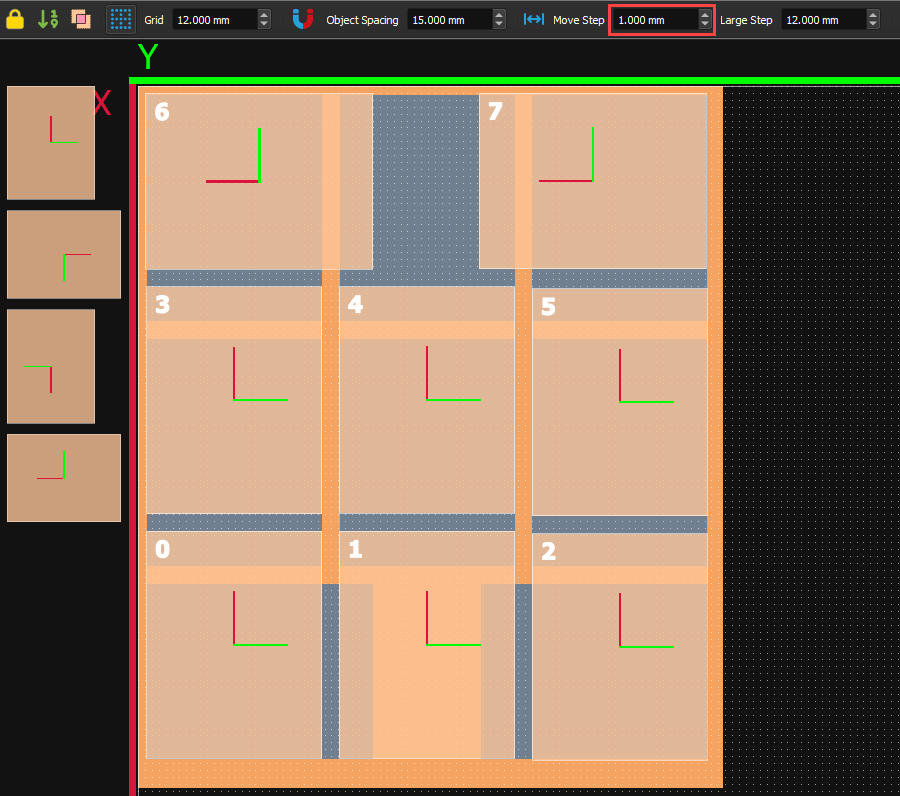
2.レイアウトのグリッドが必要に応じて設定されていることを確認してください。ここでは12mmを使用します。また、"Object Spacing "の値を変更して、ボックス間のギャップを一定にすることもできます。

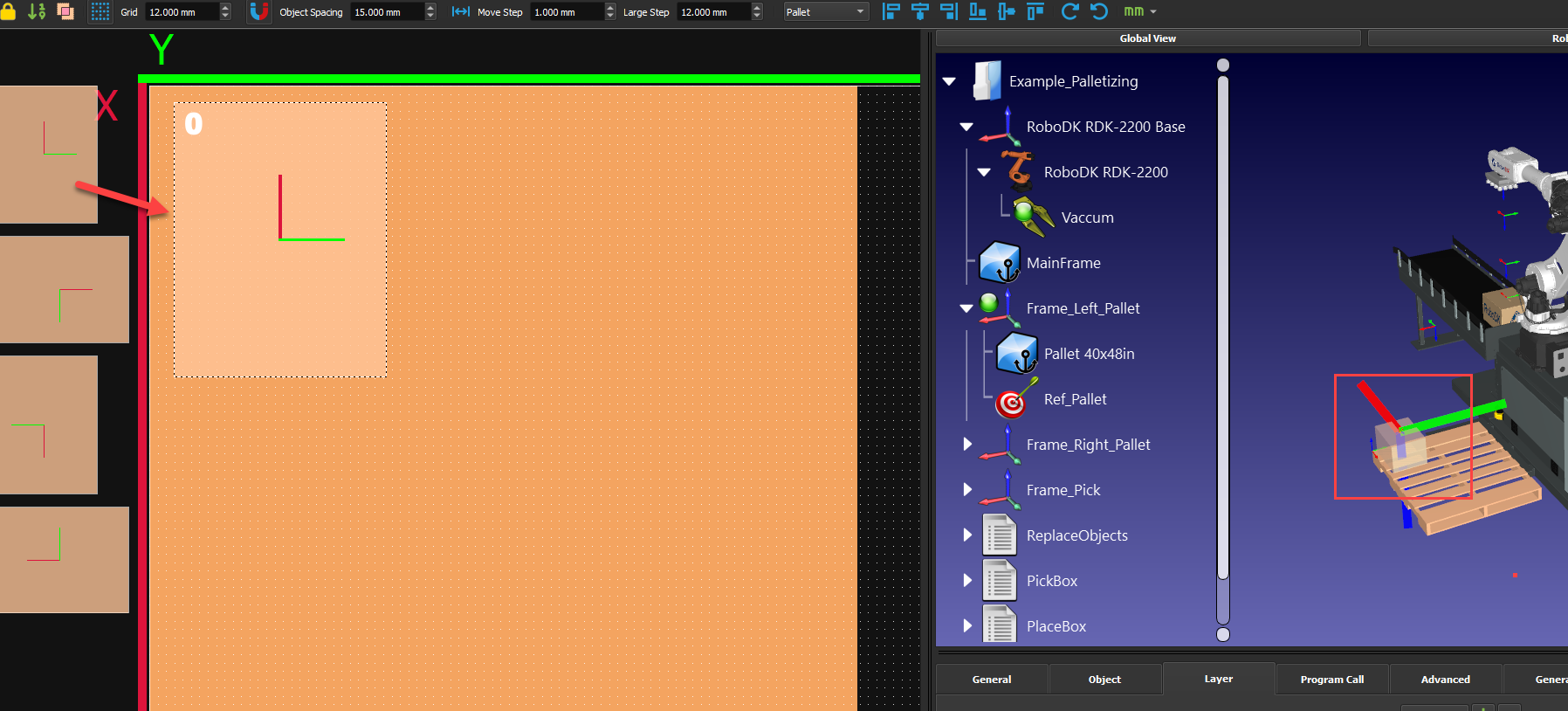
3.左からボックスを選択し、パレットにドラッグ&ドロップします。
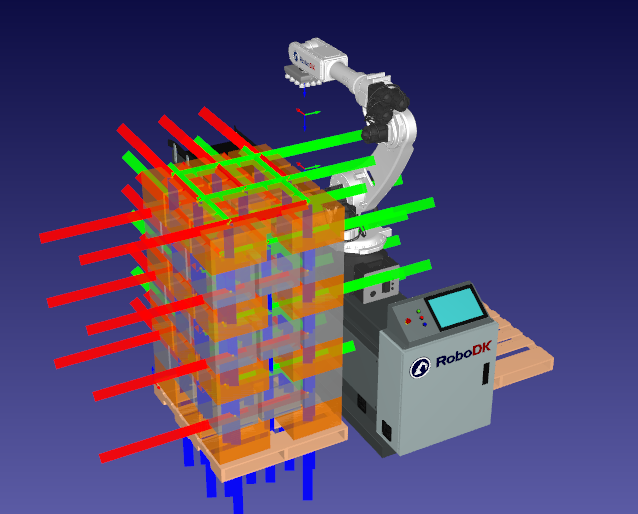
4.2Dインターフェイス上でボックスを動かすと、3D環境にボックスが表示されます。3D環境のボックスが赤くなったら、それはロボットの手の届かないところにあることを意味します。
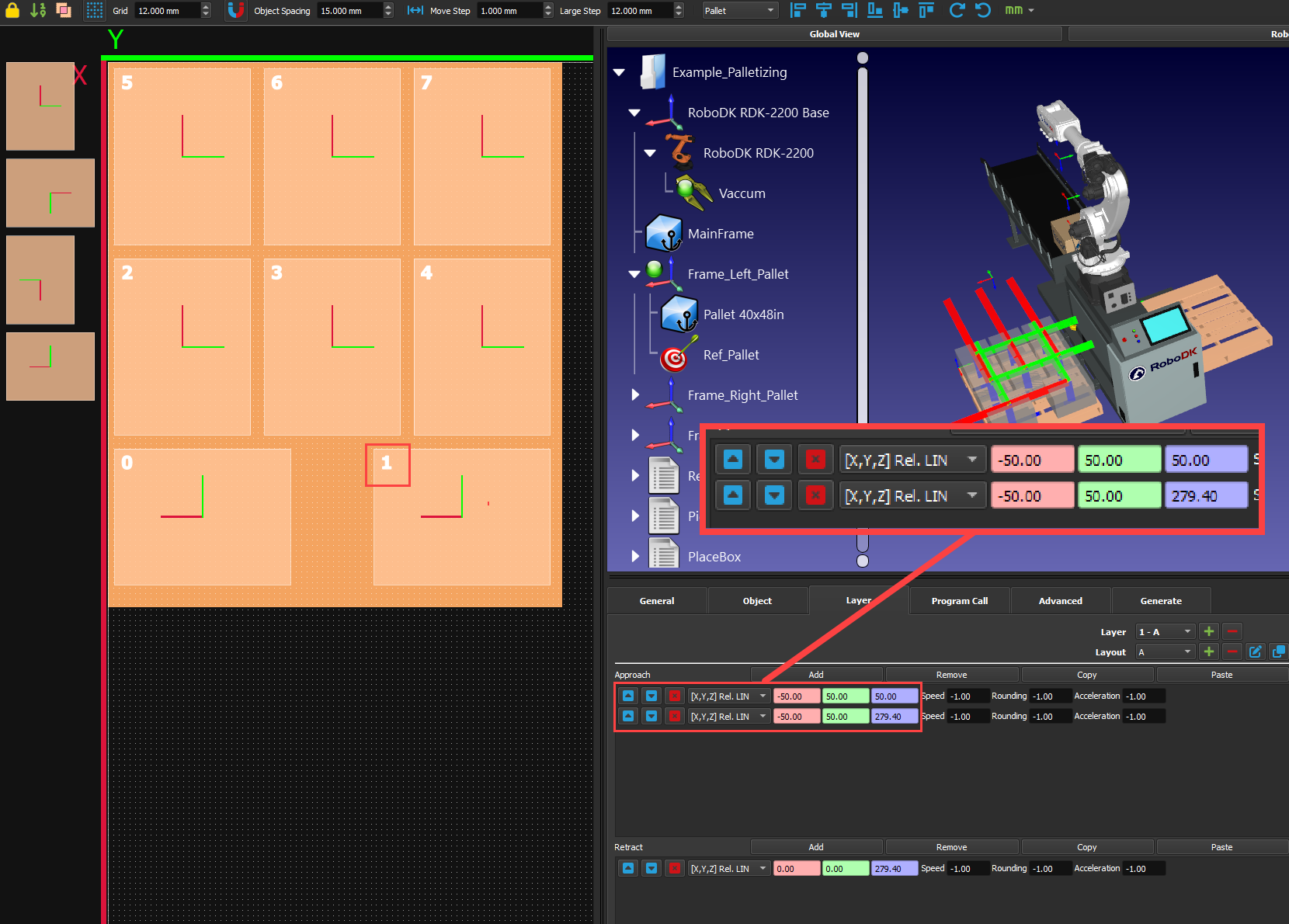
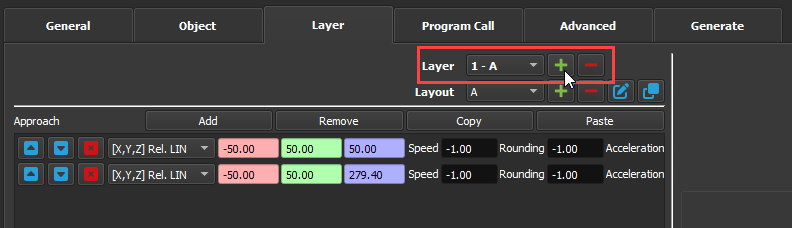
5.最初のレイヤーレイアウトを作成します。ボックスの左上の数字は、ボックスを配置する順番を表します。ボックスを右クリックして順番を変更することができます。また、線を追加して、ボックスに対して相対的に接近または後退させることもできます。この例の値を取ることができますが、必須ではありません。あなたのプログラムにどのような効果があるか、試してみてください。
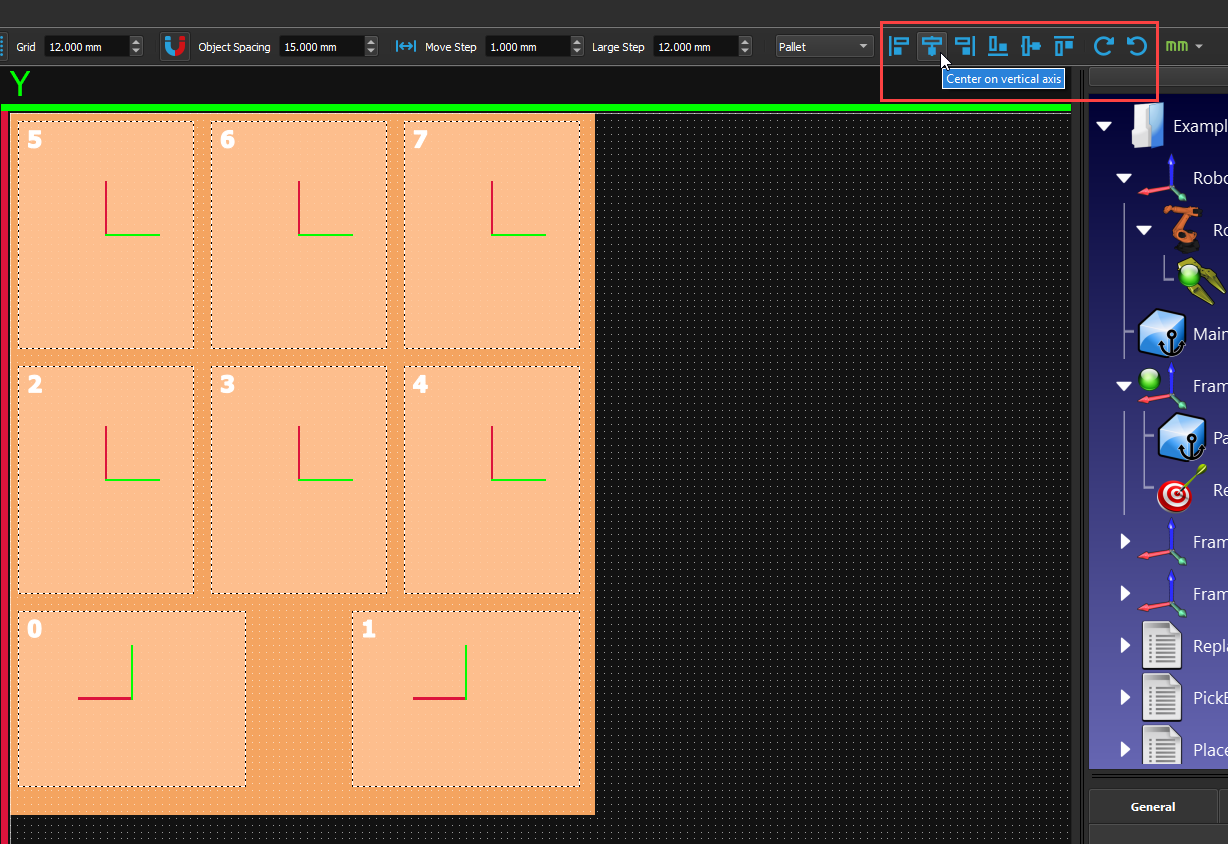
6.右上の様々な整列ボタンを使って、簡単にボックスを整列させることができます。すべてのボックスを選択し、満足するまでさまざまなオプションをクリックしてください。また、正しい向きで新しいボックスを生成する代わりに、ボックスを回転させることもできます。
7.レイヤー" の横にある"+ " ボタンを押して、スタックに新しいレイヤーを追加します。新しいレイヤーを追加すると、その下のレイヤーと同じパターンがコピーされます。
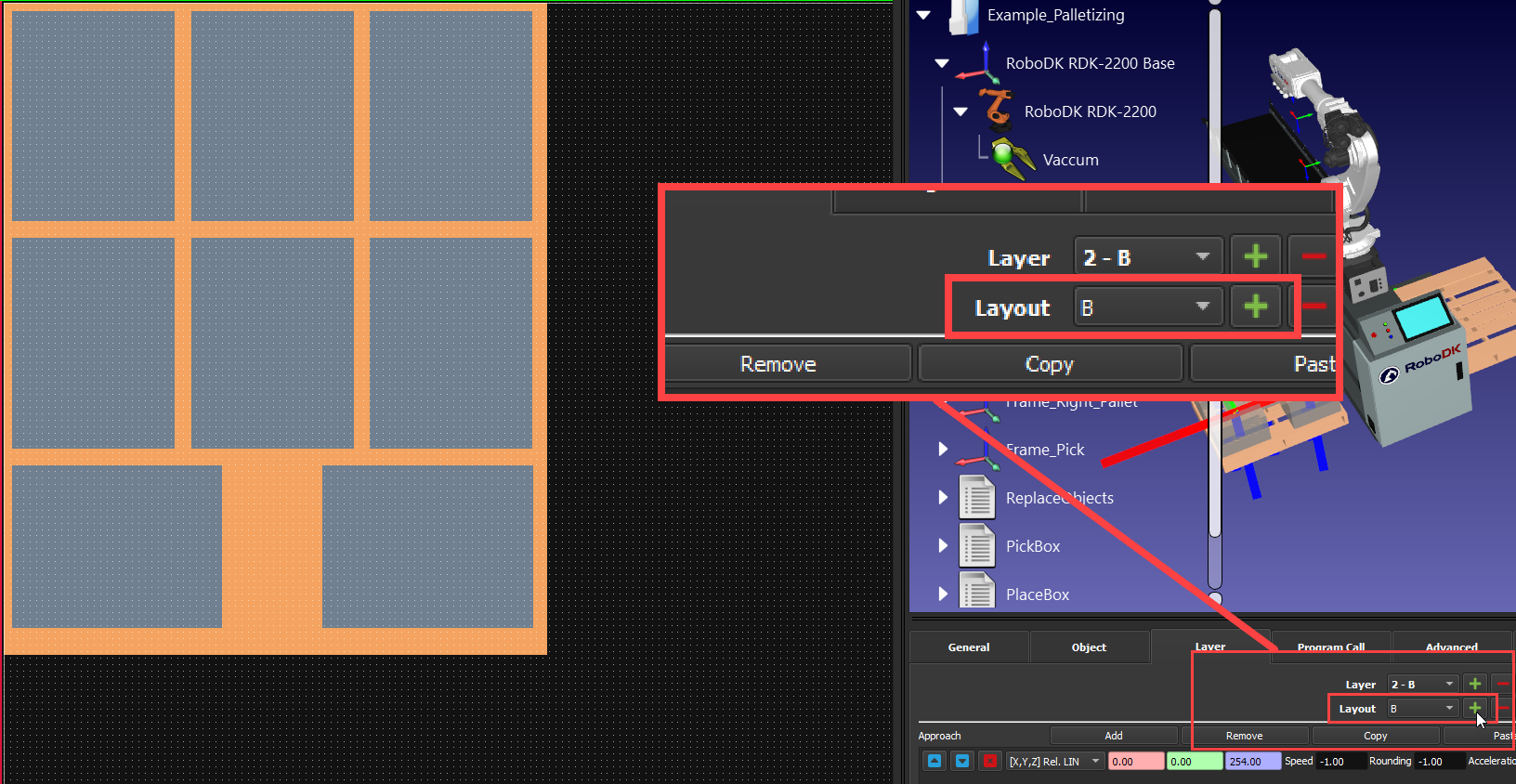
8.レイアウト" の横にある"+ " ボタンを押すと、新しいレイアウト(パターン)を作成できます。前のレイヤーレイアウトはグレーアウトされたままなので、その上に新しいボックスを適切に配置することができます。
9.代替レイアウトを作成します。CTRLを押しながらキーボードの矢印を使うと、ボックスの位置を微調整できます。ウィンドウ上部の "Move Step "で、この増分の大きさを変更できます。
10.レイヤーは好きな数だけ追加でき、交互に並べることもできます。3Dビューで箱の色を見て、箱がロボットの手の届く範囲にあることを確認してください。
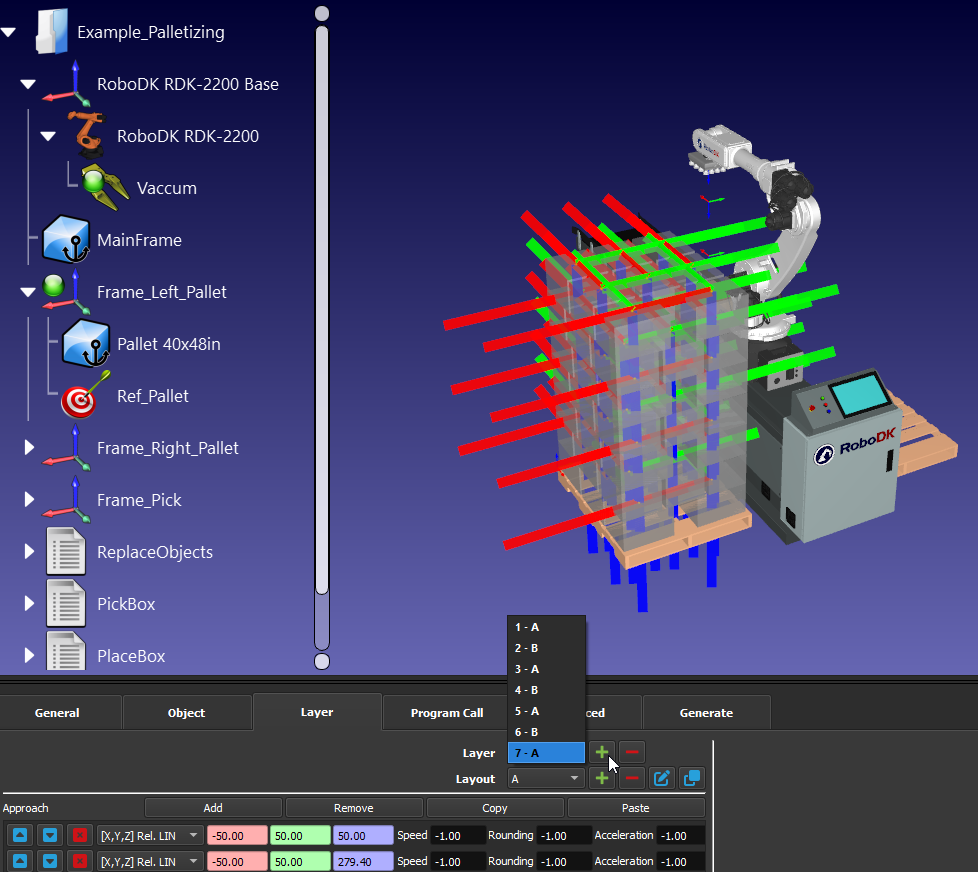
注:3Dインターフェースは、アプローチ/リトラクト位置が手の届かないところにある場合、オレンジ色のボックスでお知らせします。
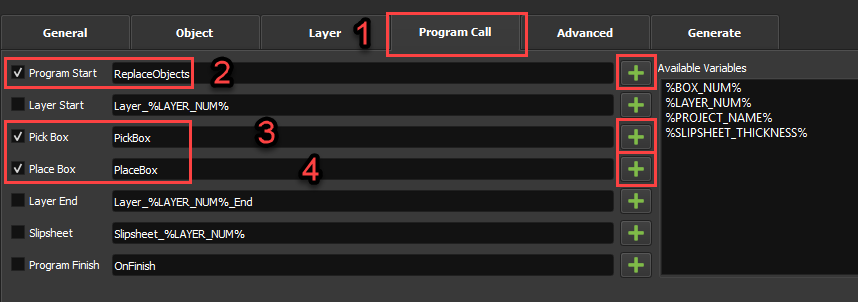
11.Program Call "タブでは、"+"ボタンをクリックすることで、様々なイベントのプログラムを選択することができます。例えば、少なくとも "Pick Box "と "Place Box "のプログラムを選択する必要があります。この例では、"Program Start "プログラムも使用しますが、"Go Home "プログラムを作成し、それを "Program Finish "で選択することで、パレットが終了したらロボットはホームに戻ります。