クリエイト・ピック&ドロップ
パレタイジングウィザードでは、新しいボックスをピックするサブプログラムとボックスを配置するサブプログラムを提供する必要があります。PlaceBox "プログラムは箱をグリッパーから取り外し、パレットフレームに移動するだけです。
以下の手順に従って、ピックプログラム "PickBox "とドロッププログラム "PlaceBox "を作成してください:
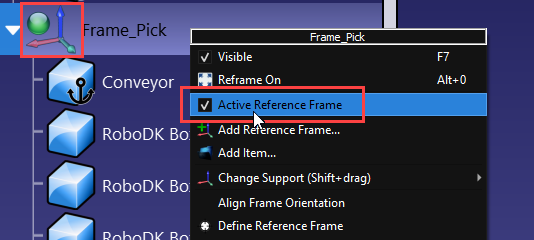
1.まず、新しいターゲットを作成する前に、"Frame_Pick "を有効にして、ツールをアクティブにしてください。アクティブになっていれば、緑色の丸が表示されているはずです。
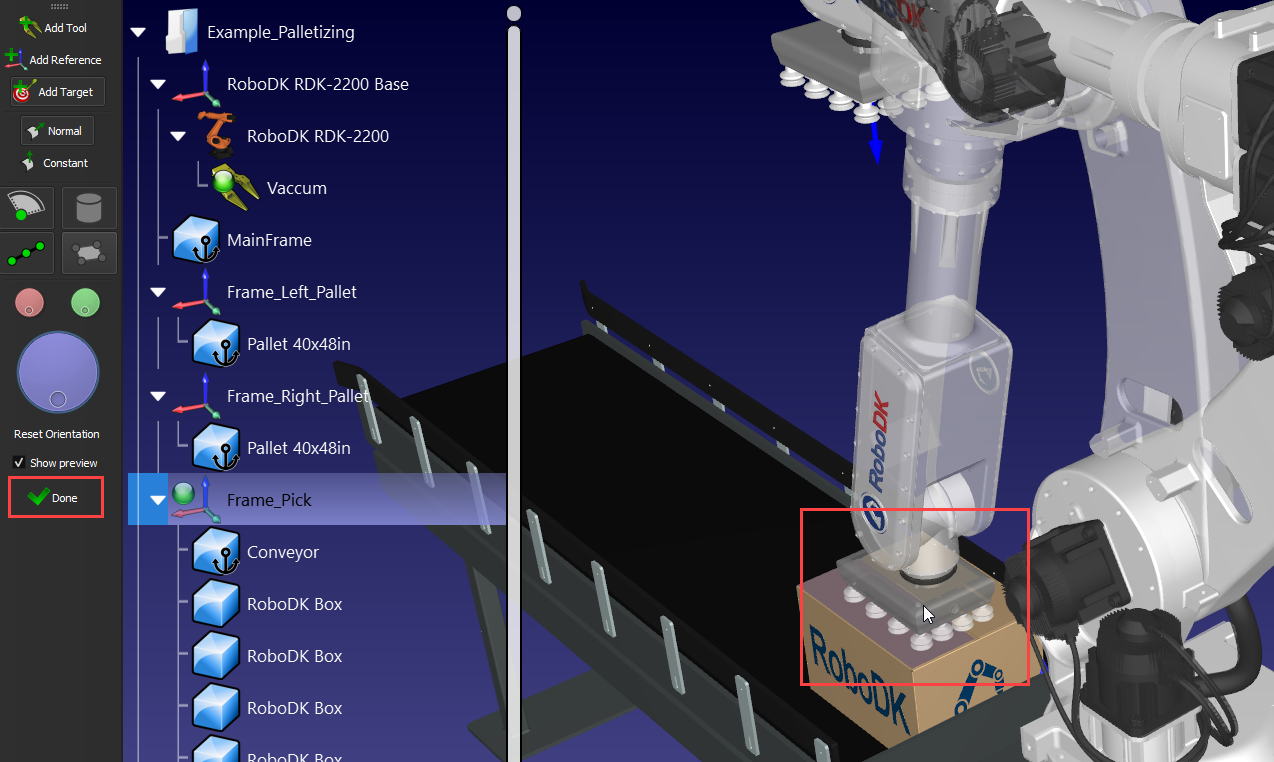
2.Program "タブで "Teach Target(s) on Surface "を選択します。ボックスの上をクリックし、「完了」をクリックします。
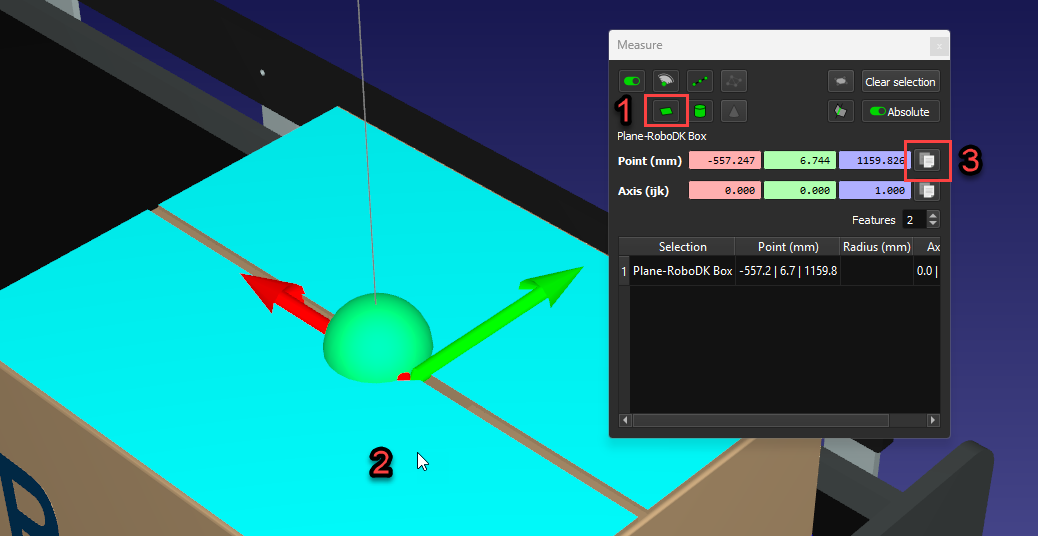
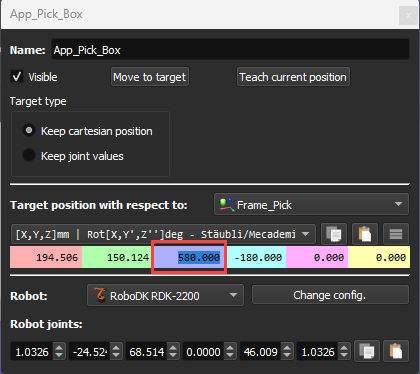
3.これで、"Frame_Pick" の下部に最初のターゲットができるはずです。ターゲットの中心がボックスの上部に来るように、SHIFT+Mを押しながら測定ツールを開き、ボックスのクリックして値をコピーします。次にターゲットをクリックし、F3を押してターゲットパラメータを編集します。基準としてステーション原点を選択し、値をペーストします。これでターゲットはボックスの中心に来るはずです。
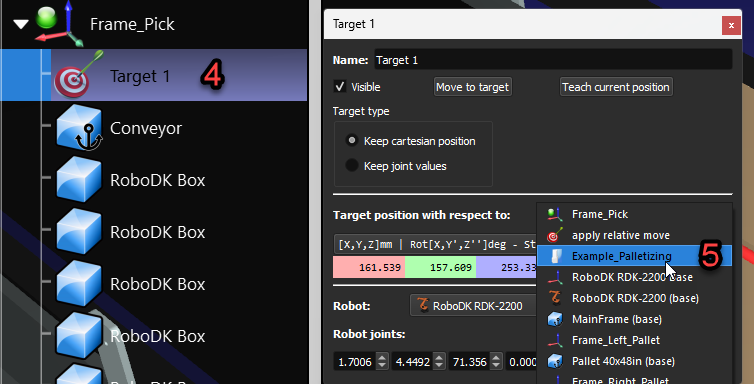
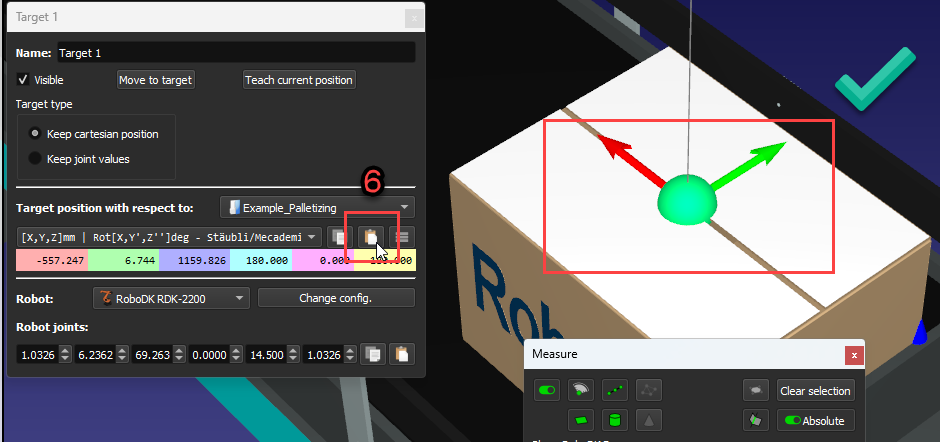
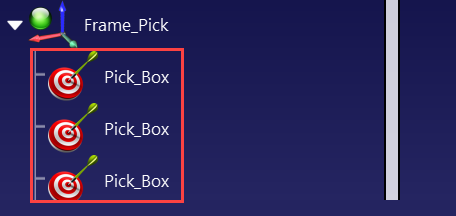
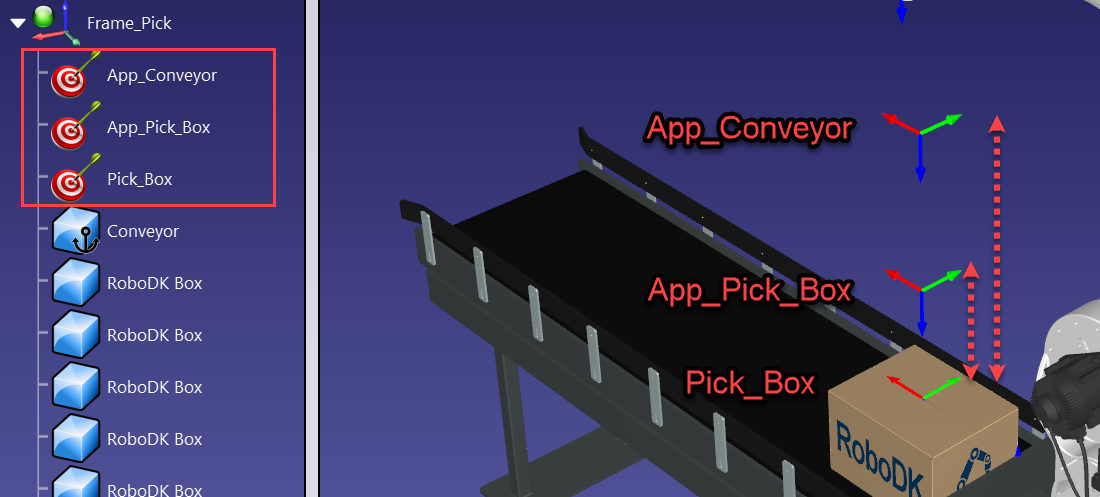
4.ターゲットの名前を"Pick_Box "に変更し、"Frame_Pick "に2回コピー&ペーストします。App_Pick_Box" と"App_Conveyor" にリネームします。次に、ターゲットのパラメータを編集し、ターゲット位置が満足いくものになるまで、スクロールホイールを使ってZ値に距離を追加します。
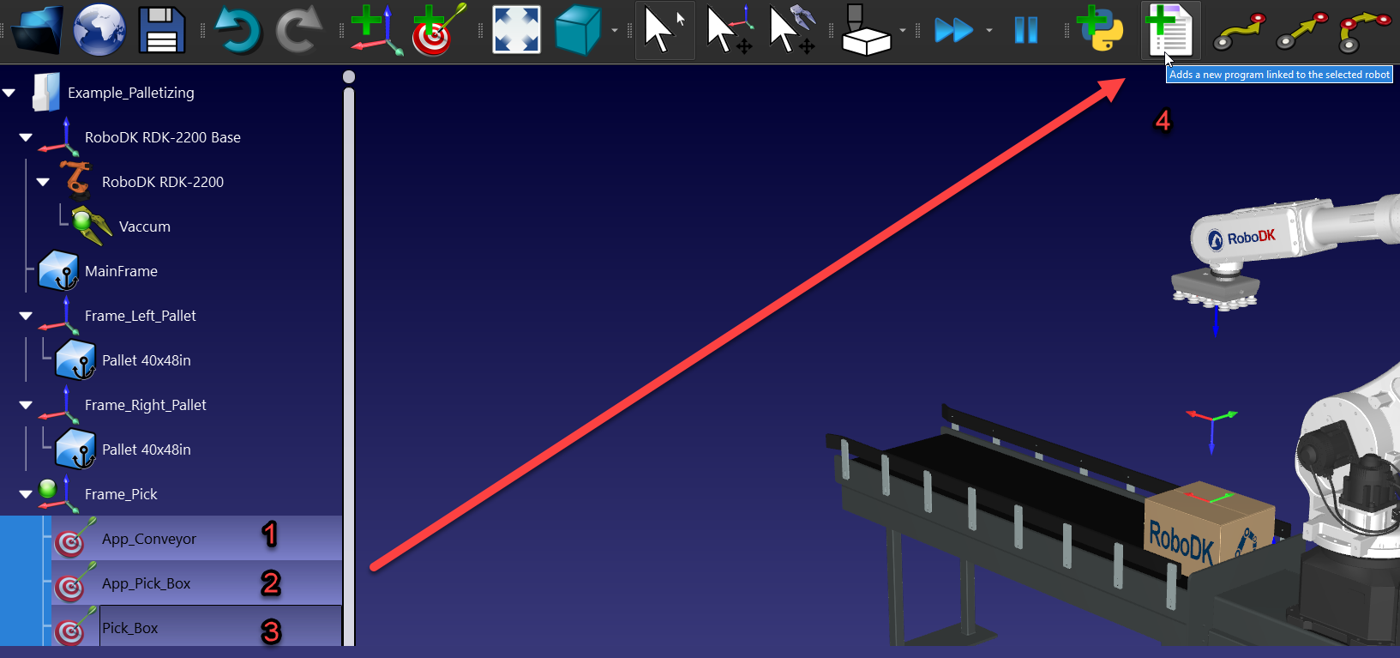
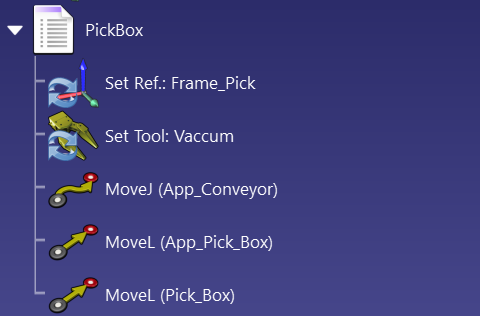
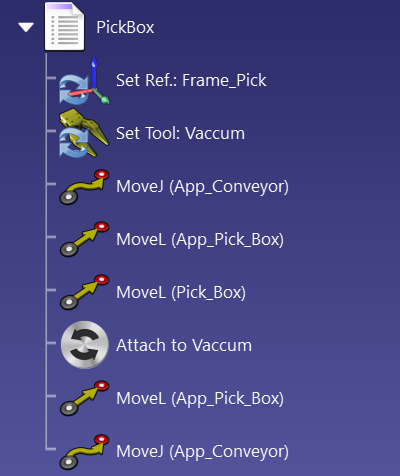
5.CTRLを押しながら、プログラムに実行させたい順番で3つのターゲットをすべてクリックし、"Create Program "をクリックします。すると自動的にターゲット、ツール、参照フレームがプログラムに追加されます。プログラムの名前を "PickBox "に変更します。
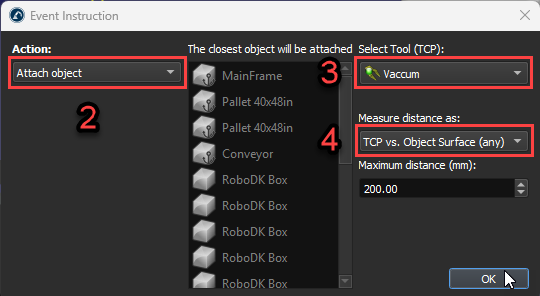
6.Event "を追加し、"Attach object "を選択し、正しいツールが選択されていることを確認し、距離の測定オプションで "TCP vs. Object Surface (any) "を選択します。これでボックスがツールにアタッチされます。App_Pick_Box "ターゲットと "App_Conveyor "ターゲットをコピーし、添付されたイベントに従って貼り付けます。これで、ピッキングプログラムが動作するはずです
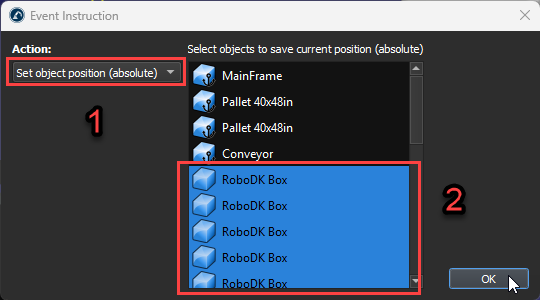
7.空のプログラムを作成し、イベントを追加し、"Set object position (absolute) "を選択し、すべてのボックスを選択します。このプログラムはボックスを元の位置に戻すので、ワンクリックでステーションをリセットできます。プログラムの名前を"ReplaceObjects "に変更してください。
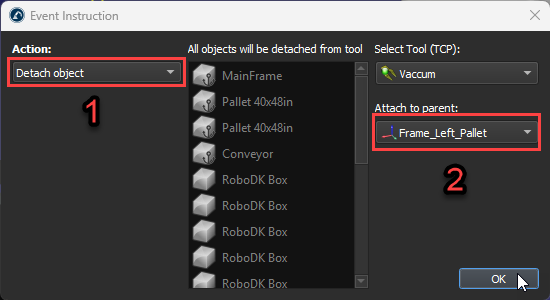
8.別の空のプロジェクトを作成し、イベントを追加し、"Detach object "を選択し、配置後にボックスを取り付けたい参照フレームを選択します。プログラム名を"PlaceBox "に変更します。
9.最後に、構成基準として使用するターゲットが必要です。パレットのリファレンスフレームをアクティブにして、ロボットをその上に移動させ、ロボットのコンフィギュレーションが理にかなっていることを確認してから、ターゲットを作成します。Ref_Pallet" という名前に変更してください。
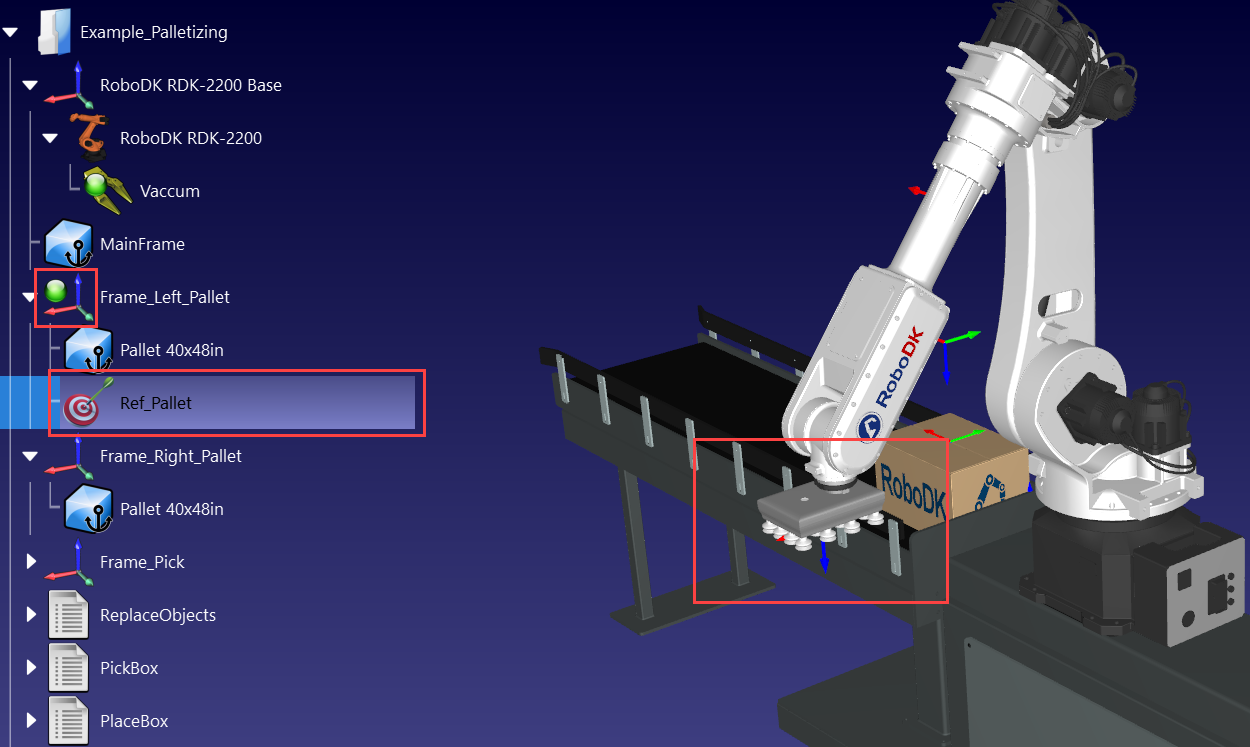
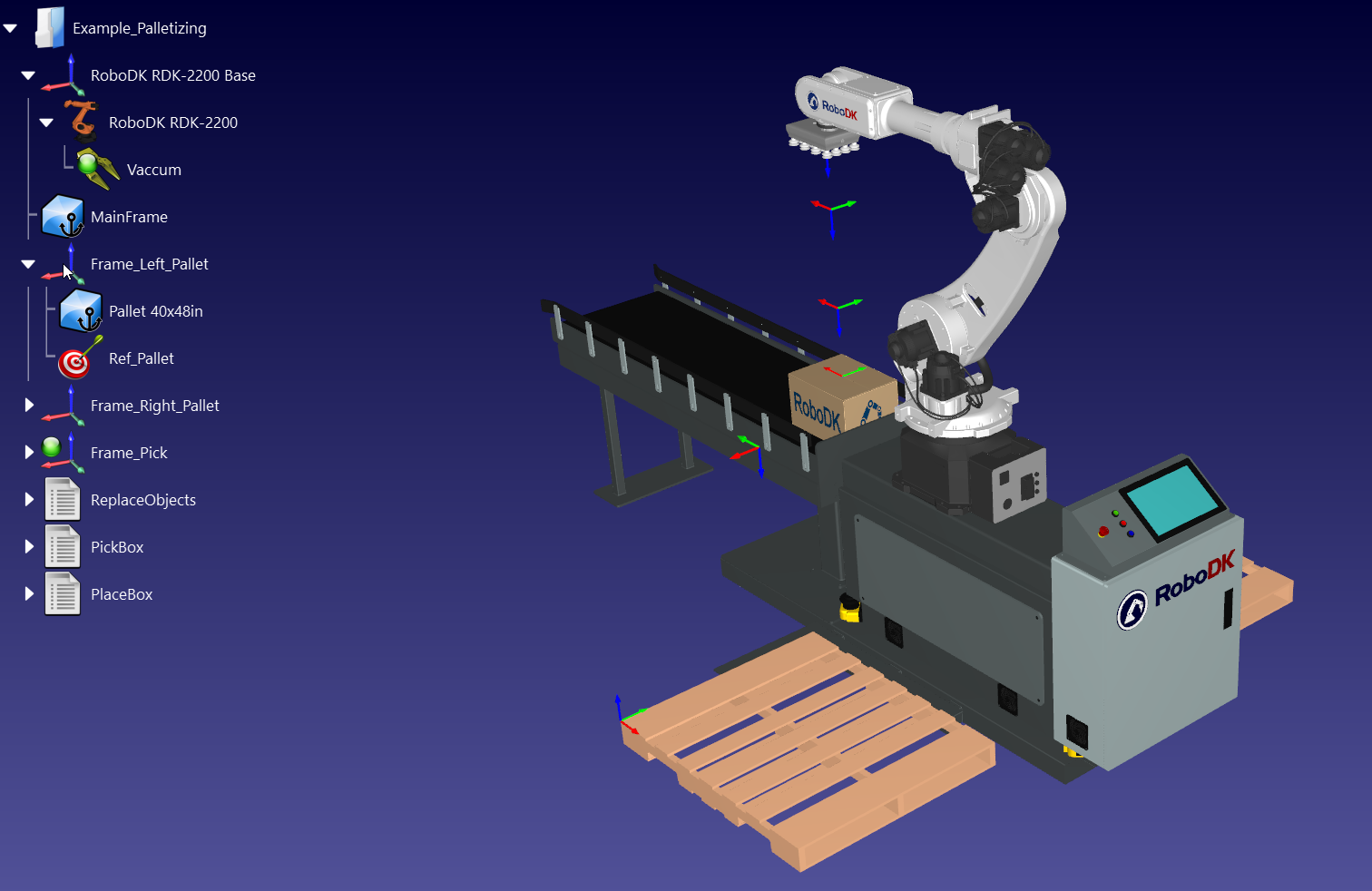
これで、パレタイジングプロジェクトを作成するためのすべての準備が整いました。ステーションはこのようになっているはずです: