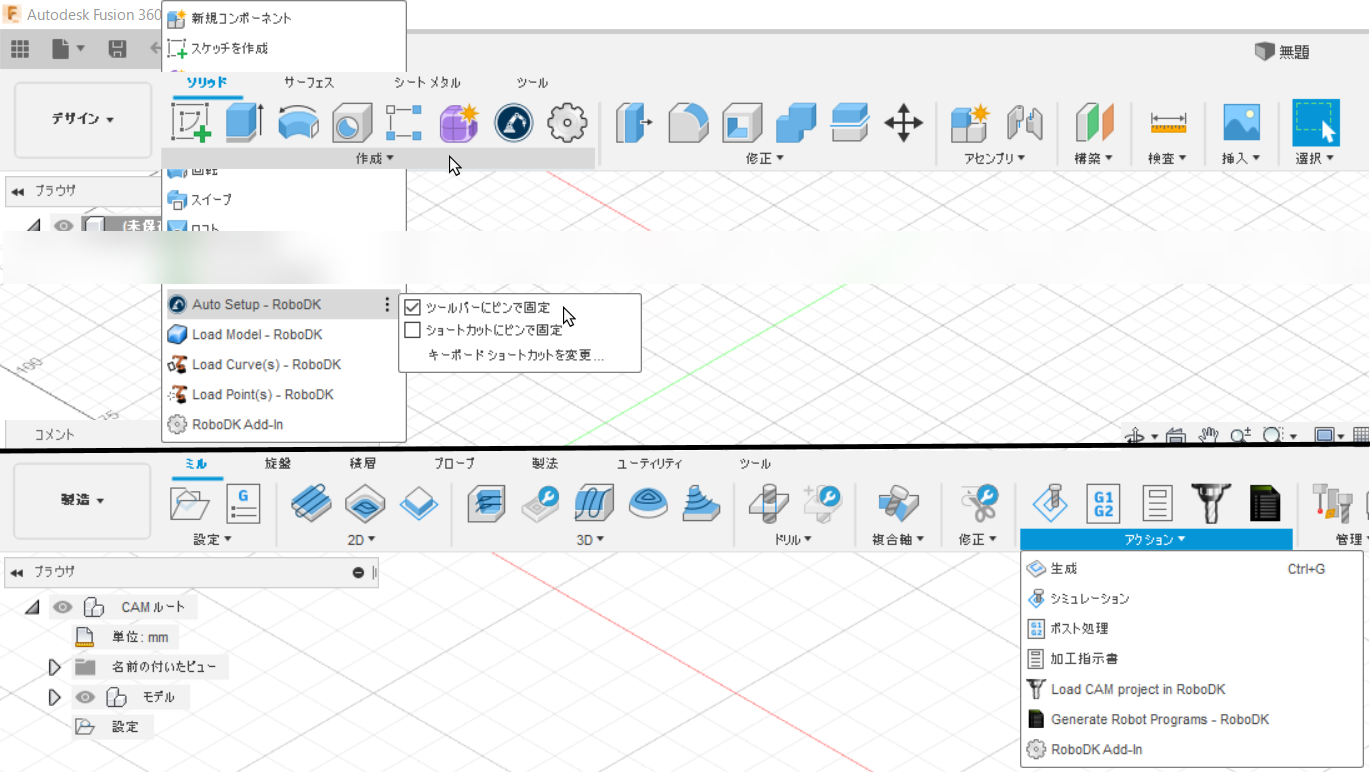
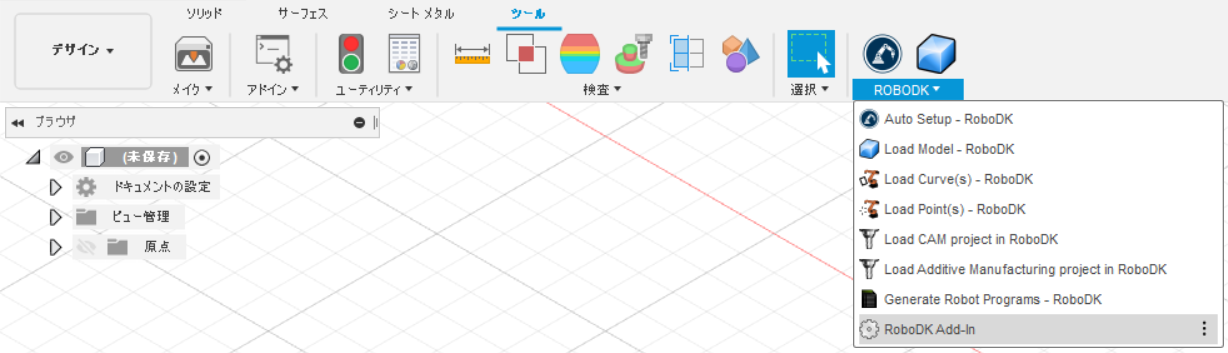
オートデスクFusion 360のツールバーには、デフォルトでCADおよびCAM用に7つのコマンドが使用できるRoboDK専用のツールバーが含まれています。
ヒント:ツールバーに特定のコマンドを表示させるように(メニューの右側から)ツールバーにピンで固定が選択できます。
● 自動セットアップ(Auto Setup)– このボタンは、選択したどのジオメトリ(曲線または点)でも読み込むことができます。表面を選択して、曲線の法線を抽出する事もできます。ジオメトリは、3Dモデルと共にRoboDKに読み込まれます。
自動セットアップ(Auto Setup)– このボタンは、選択したどのジオメトリ(曲線または点)でも読み込むことができます。表面を選択して、曲線の法線を抽出する事もできます。ジオメトリは、3Dモデルと共にRoboDKに読み込まれます。
ヒント: Ctrlキーを押したまま選択すると、複数のジオメトリ(実体)が選択できます。コマンドを実行する前に、ジオメトリを選択する必要があります。
● パーツを読み込む(Load Part)– Fusion 360からRoboDKに3Dモデルを読み込みます。曲線や点などの特徴は読み込まれません。
パーツを読み込む(Load Part)– Fusion 360からRoboDKに3Dモデルを読み込みます。曲線や点などの特徴は読み込まれません。
● 点を読み込む(Load Point(s))–選択した全ての点を新しいオブジェクトとしてRoboDKに読み込みます。選択された表面が、点の法線を計算する為に使用されます。これらの法線は、ロボットの接近軸を定義する為、必要です。
点を読み込む(Load Point(s))–選択した全ての点を新しいオブジェクトとしてRoboDKに読み込みます。選択された表面が、点の法線を計算する為に使用されます。これらの法線は、ロボットの接近軸を定義する為、必要です。
● 曲線を読み込む(Load Curve(s))– 選択した全ての曲線を新しいアイテムとしてRoboDKに読み込みます。選択された表面が、曲線の法線を計算する為に使用されます。これらの法線は、ロボットの接近軸を定義するため、必要です。
曲線を読み込む(Load Curve(s))– 選択した全ての曲線を新しいアイテムとしてRoboDKに読み込みます。選択された表面が、曲線の法線を計算する為に使用されます。これらの法線は、ロボットの接近軸を定義するため、必要です。
● 設定(Settings)– デフォルトの設定ウィンドウを開く。
設定(Settings)– デフォルトの設定ウィンドウを開く。
● CAMプロジェクトを読み込む(Load CAM Project)– 加工プロジェクトをRoboDKに読み込みます。複数のツールを使用して加工する場合、RoboDKは自動的にプログラムを各ツール用に分割して、プロジェクト設定を割り当てます。この動作は、RoboDKのツール-設定-CAMで変更できます。
CAMプロジェクトを読み込む(Load CAM Project)– 加工プロジェクトをRoboDKに読み込みます。複数のツールを使用して加工する場合、RoboDKは自動的にプログラムを各ツール用に分割して、プロジェクト設定を割り当てます。この動作は、RoboDKのツール-設定-CAMで変更できます。
● ロボットプログラムを生成(Generate Robot Program)– RoboDKプロジェクトで利用可能なプログラムを全て生成します。
ロボットプログラムを生成(Generate Robot Program)– RoboDKプロジェクトで利用可能なプログラムを全て生成します。
Auto SetupとLoad Curve(s)またはLoad Point(s)の主な違いは、Auto Setupはパーツを読み込み、新しい曲線/点を辿るプロジェクトを作成します。Load curve(s)またはLoad Point(s)は読み込みが早くなり、RoboDKにある既存のジオメトリーの特徴のみを更新し、以前に定義された設定を維持します。
ヒント:デフォルト設定を使用して、FusionからRoboDKに複数のオブジェクトを読み込む場合は、読み込んだ後でオブジェクトの名前を変更する必要があります。
また、モデル作業スペースの作成タブに5つのコマンド(CAD機能)があり、製造作業スペースのアクションタブに2つのコマンド(CAM機能)があります。