Inventor
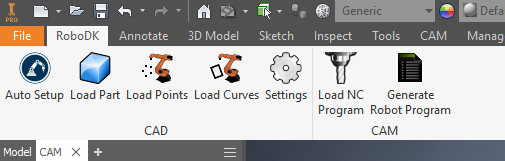
デフォルトのRoboDKツールバーには、CADおよびCAM用の7つのコマンドが含まれています。
●
●
●
●
●
●
●
Auto SetupとLoad CurveまたはLoad Point(s)の主な違いは、Auto Setupがパーツをロードし、新しいCurve / Point followプロジェクトを作成することです。ロードカーブまたはロードポイントを使用するとより高速になり、RoboDKの既存のジオメトリフィーチャーを更新し、以前に定義された設定を維持します。
デフォルトのRoboDKツールバーには、CADおよびCAM用の7つのコマンドが含まれています。
●
●
●
●
●
●
●
Auto SetupとLoad CurveまたはLoad Point(s)の主な違いは、Auto Setupがパーツをロードし、新しいCurve / Point followプロジェクトを作成することです。ロードカーブまたはロードポイントを使用するとより高速になり、RoboDKの既存のジオメトリフィーチャーを更新し、以前に定義された設定を維持します。