Inventor
Autodesk Inventor用のRoboDKアドインを使用すると、Autodesk Inventorの3D CAD / CAMモデリング機能をRoboDKと組み合わせて、ロボットシミュレーション、オフラインプログラミング、およびロボット加工を行うことができます。
Inventor用のRoboDKアドインを使用すると、Inventorで作成された3DモデルをRoboDKに簡単にロードできます。このプラグインを使用すると、30以上の異なるロボットメーカーと400のロボットをInventorから直接プログラムできます。
ロボットは、穴あけ、溶接、トリミング、3Dプリント、ロボット加工など、さまざまな製造アプリケーション向けの5軸マシンとして簡単にプログラムできます。詳細については、ロボット加工部門。
のロボットポストプロセッサセクションは、サポートされているロボットのブランドとコントローラのリストを示しています。新しいポストプロセッサーを変更または作成して、プログラム生成をカスタマイズすることもできます。
注意:これを読む入門ガイド RoboDKを初めて使用する場合。
Autodesk Inventor用RoboDKアドインは、Inventor 2018以降で動作します。RoboDK Inventor Add-Inは、すでにRoboDKライセンス。
#AIInstallをインストールする
Autodesk InventorとRoboDKをすでにインストールしている場合は、Inventorで使用可能なInventor用のRoboDKプラグインが必要です。Inventor用のRoboDKプラグインがツールバーに表示されます。
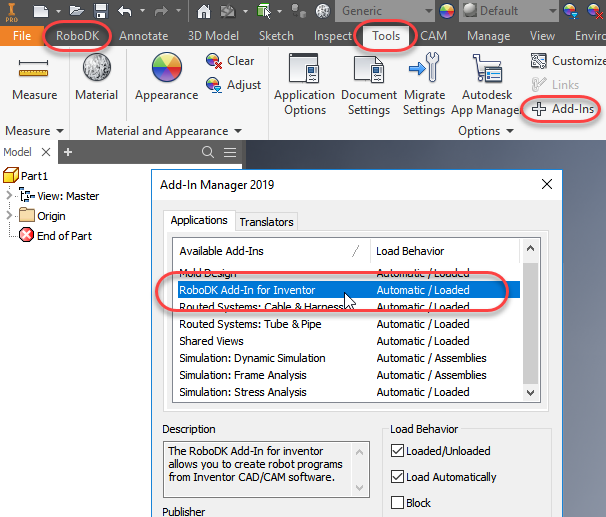
注意: RoboDKツールバーがInventorに表示されない場合は、[ツール]を選択して有効にする必要があります➔アドイン、RoboDK Add-In for Inventorを確認します。次の画像に示すように。
注意: InventorにRoboDKツールバーが表示されない場合は、次の手順に従ってください。プラグインを手動でインストールする。
注意:Inventorプラグインは、RoboDKのデフォルト設定を変更して、Inventorの3Dマウスナビゲーションとウィンドウスタイルに一致させることができます。この動作は、プラグイン設定ウィンドウ。または、デフォルトのRoboDK設定。
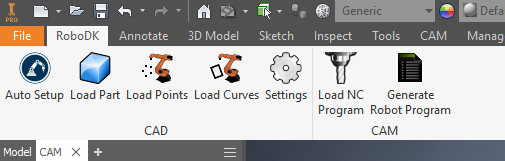
Inventorツールバー
デフォルトのRoboDKツールバーには、CADおよびCAM用の7つのコマンドが含まれています。
●
●
●
●
●
●
●
Auto SetupとLoad CurveまたはLoad Point(s)の主な違いは、Auto Setupがパーツをロードし、新しいCurve / Point followプロジェクトを作成することです。ロードカーブまたはロードポイントを使用するとより高速になり、RoboDKの既存のジオメトリフィーチャーを更新し、以前に定義された設定を維持します。
設定
[設定]ボタンを選択して、デフォルトのRoboDKプラグイン設定を変更できます。
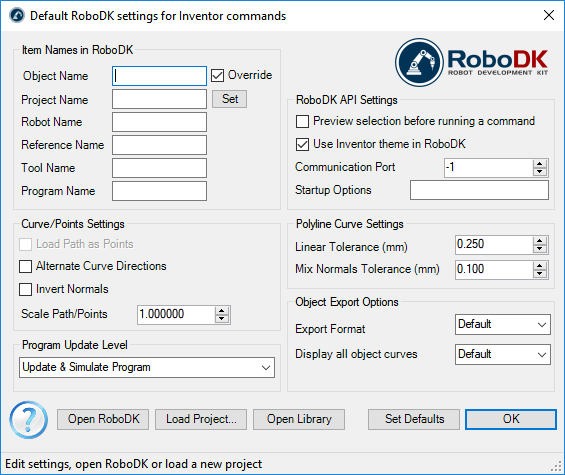
●オブジェクト名– RoboDKにロードされる曲線/ポイントオブジェクトの名前を設定します。このケースを空白のままにすると、パーツまたはアセンブリファイルの名前が使用されます。
●上書き–名前が一致する場合、RoboDKに以前にロードされたオブジェクトをオーバーライドします。
●プロジェクト名–使用するRoboDKプロジェクト/ステーション(.RDKファイル)の名前/パスを設定します。ファイルが既にロードされている場合は、既存のプロジェクトが使用されます。RoboDKで開いているプロジェクトがファイル名と一致しない場合、フルパスを指定するとプロジェクトが開きます。
●ロボット名– RoboDKで使用されるロボットの名前を設定します(プロジェクトに複数のロボットがある場合)。ロボット名は、RoboDKステーションツリーに表示される名前と一致する必要があります。使用可能な最初または唯一のロボットを使用するには、この値を空(デフォルト)のままにします。
●参照名 - ロボットに対するパスを配置するための参照フレームの名前を設定します。名前は、RoboDKステーションツリーに表示される名前と一致する必要があります。名前が指定されていない場合、アクティブな参照フレーム
●ツール名– パスをたどるためにロボットで使用するツール(TCP)の名前を設定します。名前は、RoboDKステーションツリーに表示される名前と一致する必要があります。名前が指定されていない場合、アクティブなツールフレーム
●プログラム名– 生成されるプログラムファイルの名前を設定します。
注意:プログラムを表示するためのプログラムとコードを生成するオプションを必ず選択してください。
●パスをポイントとしてロード– カーブをポイントに変換するには、このオプションをオンにします。ポイントフォロープロジェクトRoboDKで作成されます。これは、穴あけなどの製造作業に役立ちます。このオプションをオフにすると、パスがカーブフォロープロジェクト。
●代替曲線方向-このオプションをチェックすると、パスごとに移動方向が交互になります(ジグザグパターン)。
●法線を反転–このオプションをオンにすると、計算されたサーフェス法線が反転します。これにより、ロボットのツールの向きが反転します。
●RoboDKでInventorテーマを使用する– InventorテーマでRoboDKを起動します。これには、3Dナビゲーション用のマウスの動作と背景色の変更が含まれます。これらの設定は、RoboDKメニューの[ツール]-[オプション]で変更できます。
●通信ポート– RoboDKと通信するように通信ポートを設定します。RoboDKの複数のインスタンスを同時に実行し、異なるポートを使用する場合は異なる設定を使用できます。この値を-1(デフォルト)に設定すると、デフォルトのポート(20500)が使用されます。
●起動オプション– RoboDKを初めて起動するときに渡す引数を設定します。たとえば、RoboDKを静かに開始するには、「/ NOSPLASH / NOSHOW / HIDDEN」を設定します。RoboDKが表示されていなくても、プログラムを生成できます。詳細については、コマンドライン RoboDK APIのセクション。
●線形許容差(mm)– 線形精度を設定して、曲線を点のセットとして分割します。
●法線許容差(mm)–複数のサーフェス間で通常の計算を混合するために使用される距離許容差を設定します。
●エクスポート形式– RoboDKにパーツをロードするためのエクスポート形式を選択します。
●すべてのオブジェクトカーブを表示– RoboDKにロードされたカーブが選択されていなくても表示します。この設定は、RoboDK(ツール-オプション-表示-曲線の表示)で変更できます。
ボタン:
●RoboDKを開く– RoboDKでプロジェクトを開く...新しいウィンドウが開き、追加のオプションが表示されます。
●プロジェクトの読み込み…– 現在のプロジェクトで使用するRoboDKプロジェクト(RDKファイル)をロードします。
●オープンライブラリ– RoboDKを開くオンライン図書館。
●デフォルトの設定–コンポーネントのデフォルト設定を設定します。
●OK - これらの設定を適用して、このウィンドウを閉じます。[OK]を選択しないと、変更した設定は適用されません。
例
このセクションでは、RoboDKアドインを使用してAutodesk Inventorから直接ロボットシミュレーションとプログラムを生成する基本的な例を示します。
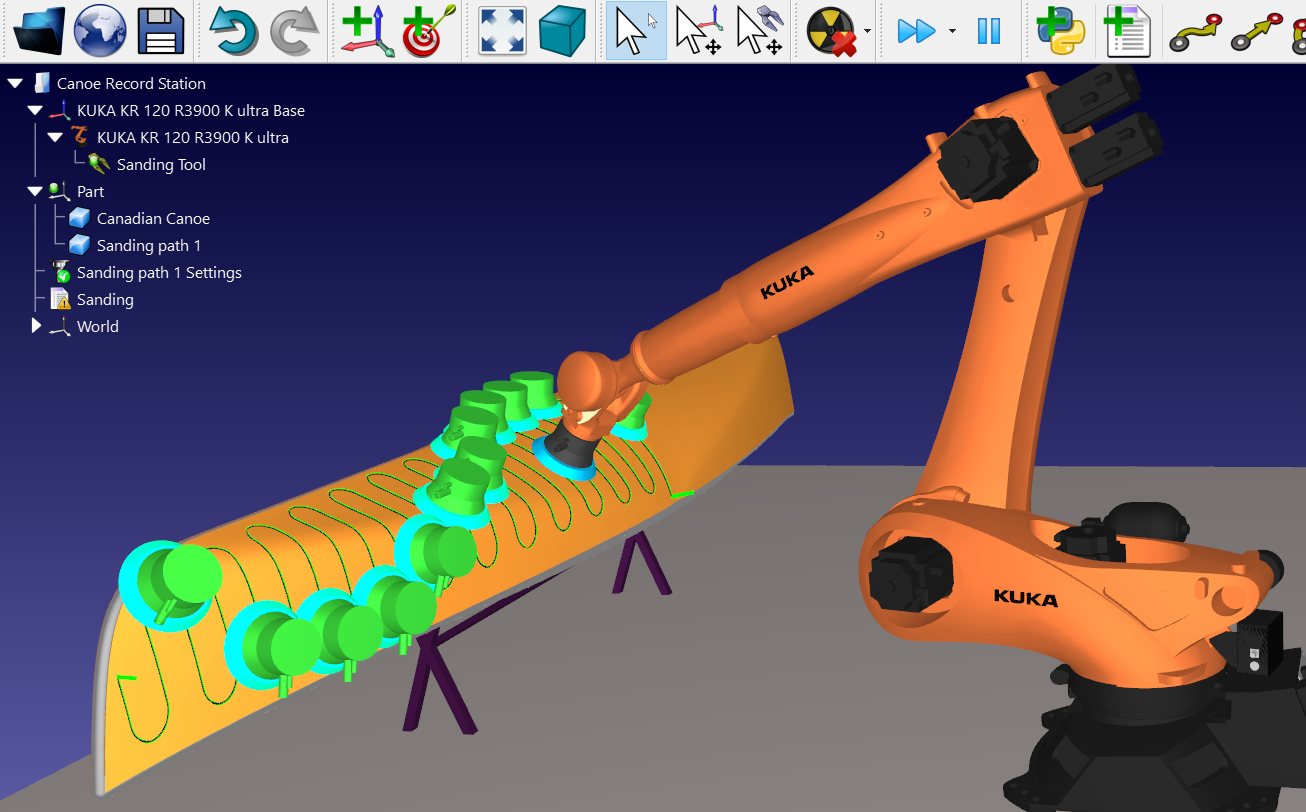
ロボット研磨
次のビデオチュートリアルは、複雑な表面を研磨するための5軸ツールパスを作成する方法を示しています。
ロボットの切断/研磨
次のビデオチュートリアルは、切削または研削用の5軸ツールパスを作成する方法を示しています。
手動インストール
これらは、Inventor用のRoboDKプラグインを設定する手動の手順です。RoboDKインストーラーを使用して、Inventor用のRoboDKプラグインがデフォルトで自動的にインストールされなかった場合は、次の手順に従ってください。
1.インストールAutodesk Inventor (まだ行っていない場合)。
2.ダウンロードとインストールRoboDK。
3.ダウンロードInventor用RoboDKプラグイン。
4.C:\ RoboDK \ Other \ Plugin-Inventor \にあるInventorフォルダーのRoboDKプラグインを解凍します。
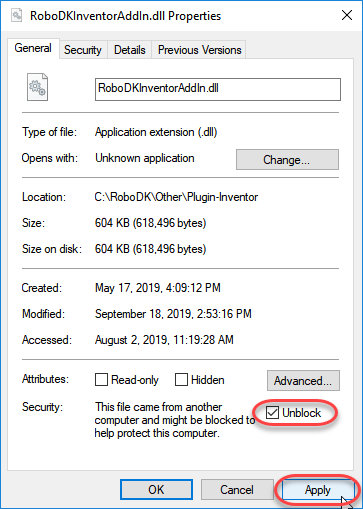
DLLファイルのブロックを解除します(該当する場合):
5.RoboDKInventorAddIn.exeファイルを右クリックし、[プロパティ]を選択します。
6.[ブロックを解除して適用]を選択します。
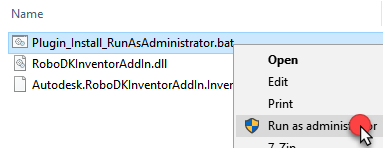
RoboDKプラグインをInventorにインストールします。
7.Plugin_Install_RunAsAdministrator.batファイルを管理者として実行します。BATファイルを右クリックして、[管理者として実行]を選択します。
注意: Inventorをデフォルトのフォルダにインストールしなかった場合は、RoboDKInventorAddIn.dllおよびAutodesk.RoboDKInventorAddIn.Inventor.addinファイル(C:\ RoboDK \ Other \ Plugin-Inventorにあります)をInventor Addinsフォルダ( C:\ Users \ UserName \ AppData \ Roaming \ Autodesk \ Inventor 2020 \ Addins(デフォルト)。
8.Autodesk Inventorを起動し、ツールに移動します➔アドイン。Inventor用のRoboDKアドインが表示されます。
注意:BATファイルを管理者として実行します。