5
この例は、Mastercamプラグインを使用して5軸ロボット切削プロジェクトを作成する方法を示しています。
ビデオ:このビデオは、このセクションで説明されているのと同じ手順を示しています:https://www.youtube.com/watch?v=wdpQ76OGS5I。
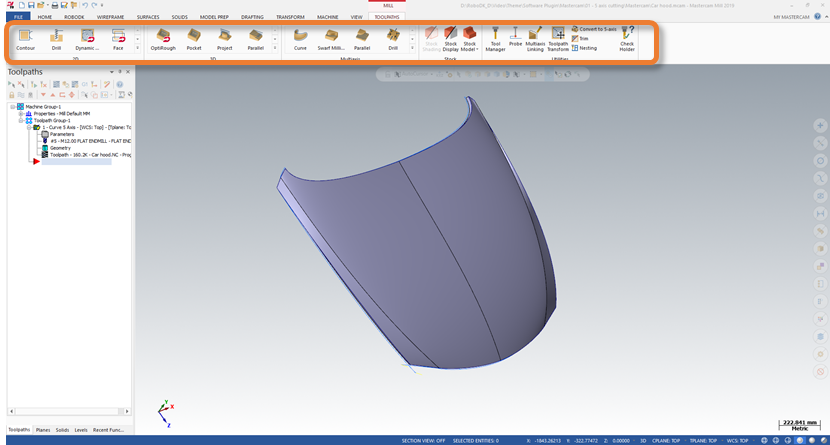
1.Mastercamにパーツをロードします。
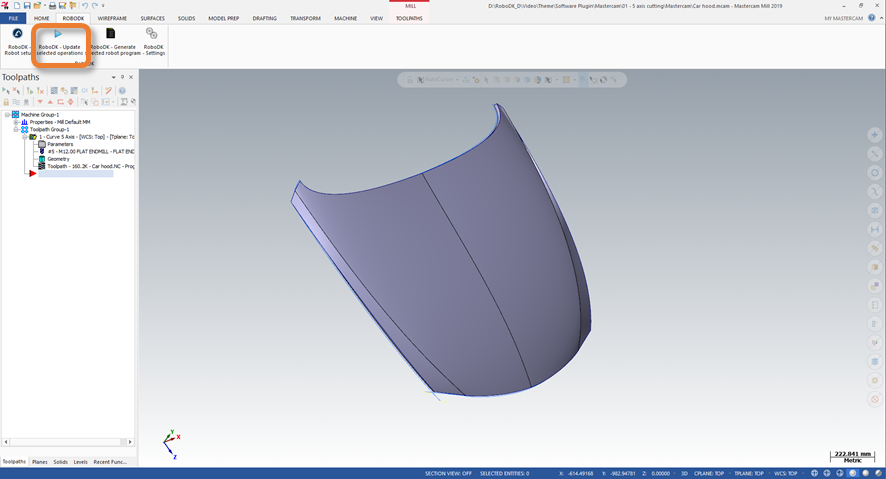
2.Mastercam Millツールを使用してツールパスを作成します。
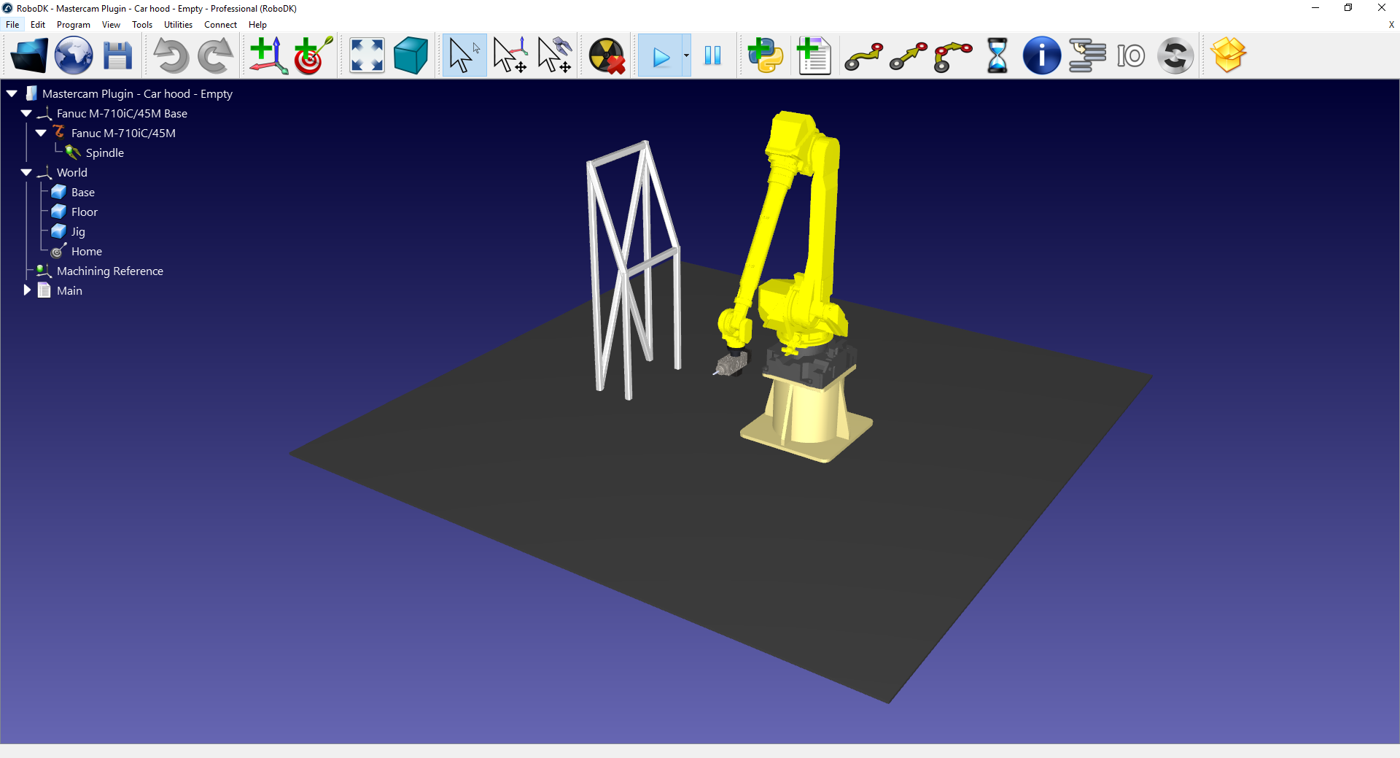
3.ロボット、スピンドル、その他の必要なオブジェクトを含むステーションをRoboDKで作成します。
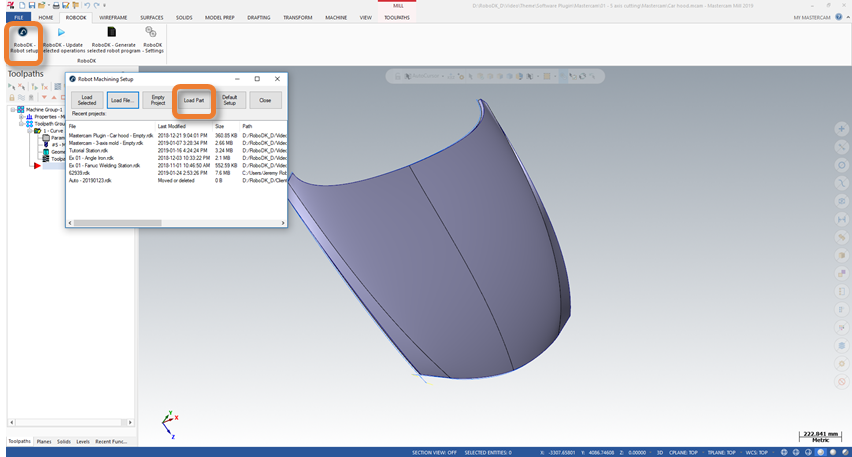
4.RoboDKプラグインタブで、RoboDKを選択します。➔ ロボットのセットアップ。
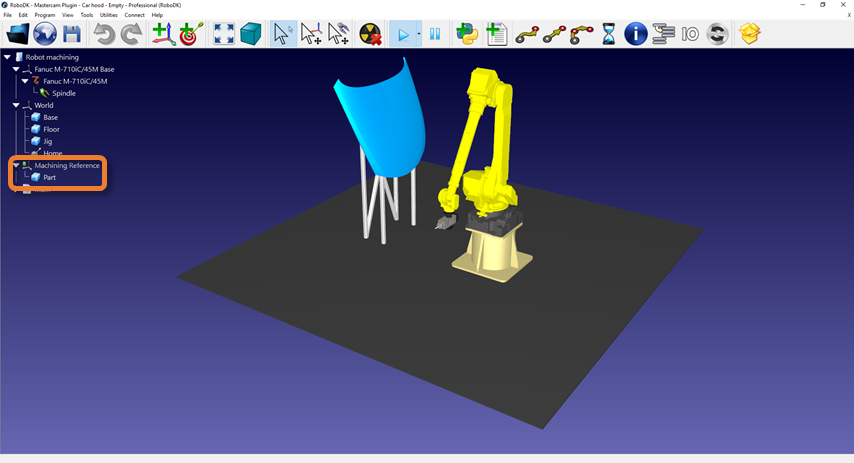
5.[Robot Machining Setup]ウィンドウで、[Load Part]を選択します。
6.RoboDKで、必要に応じて穴加工参照フレームの位置を調整します。
7.RoboDKプラグインタブで、RoboDKを選択します。➔ 選択した操作を更新。
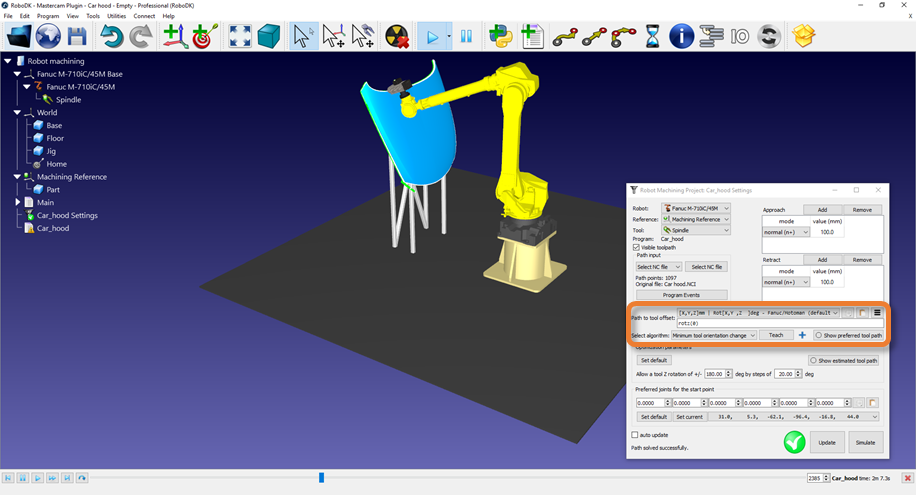
8.RoboDKでは、Robot Machining ProjectウィンドウでUpdate and Simulateを選択します。
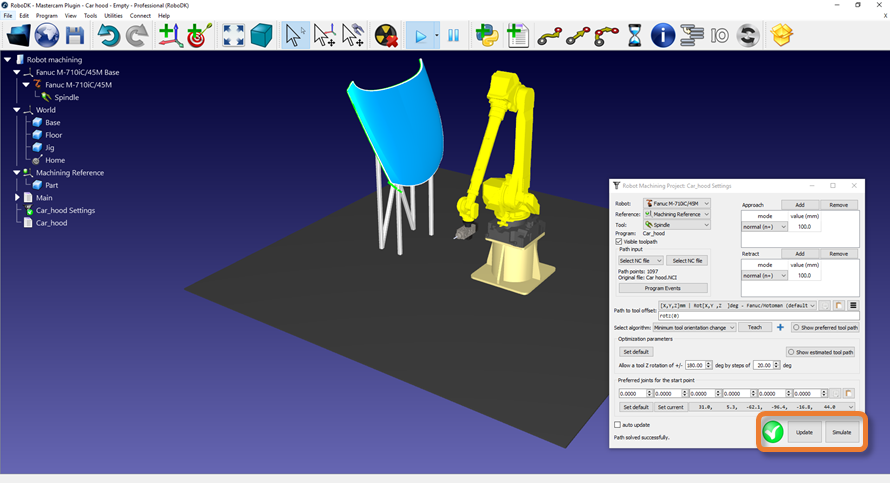
9.必要に応じて、パスに沿ったツールの方向を変更します。