ロボットのセットアップ
ロボットのセットアップ
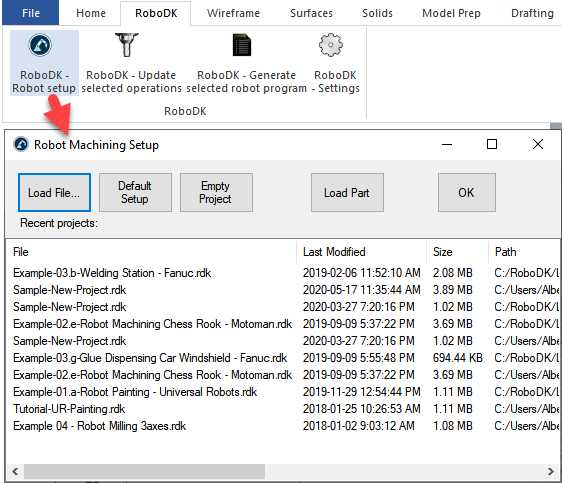
●ファイルをロード…:ファイルを選択してRoboDKで開き、Mastercamプロジェクトのデフォルトプロジェクトとして使用します。
●デフォルトのセットアップ:デフォルトのロボット、スピンドル、参照フレームを使用して新しいステーションをセットアップします。パーツはRoboDKにも自動的にエクスポートされます。
●空のプロジェクト:新しい空の画面でRoboDKを開き、ユーザーが新しいセットアップを構築できるようにします。新しいプロジェクトを最初からセットアップするための詳細情報は、はじめにセクション。
●パーツの読み込み:MastercamからRoboDKにパーツを読み込みます(パーツはSTLファイルとして保存され、自動的に読み込まれます)。
訪問ロボット加工部門 新しいセットアップの構築の詳細については。
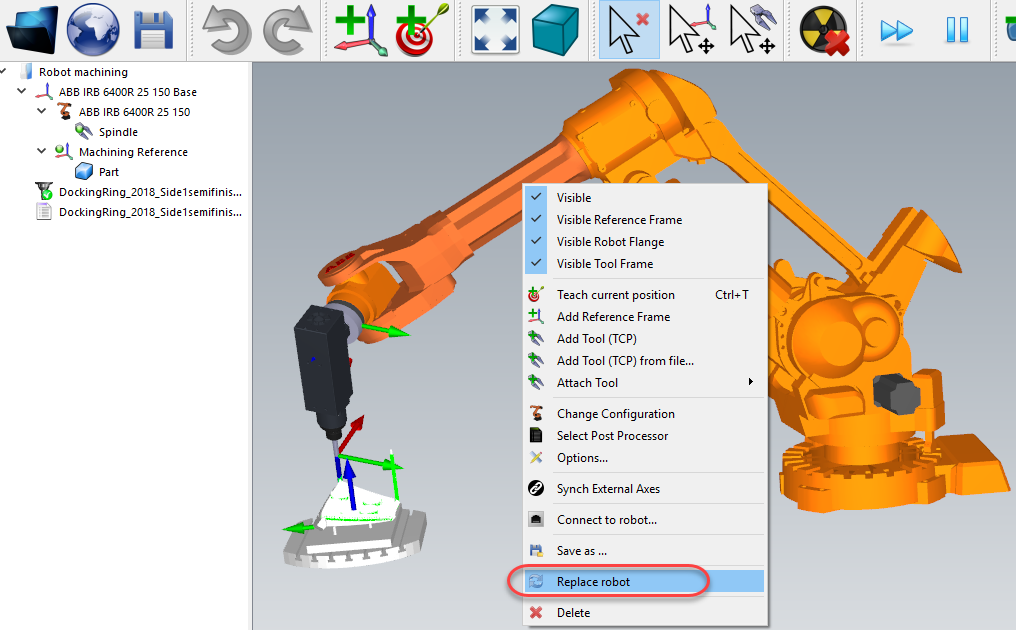
ロボットの変更、ツールの変更、参照フレームの変更が簡単にできます。例として、ロボットを変更するには、次の手順に従います。
1.ロボットを右クリック
2.[ロボットを置換]を選択します(図に示すように)
3.新しいロボットを選択
RoboDKインストーラーは、デフォルトではいくつかのロボットしか提供しませんが、より多くのロボットを オンライン図書館。
ロボットツールの追加の詳細については、はじめにセクション。
ファイルを選択してプロジェクトを保存し、変更を保存します➔ステーションを保存(Ctrl + S)。