Grasshopper
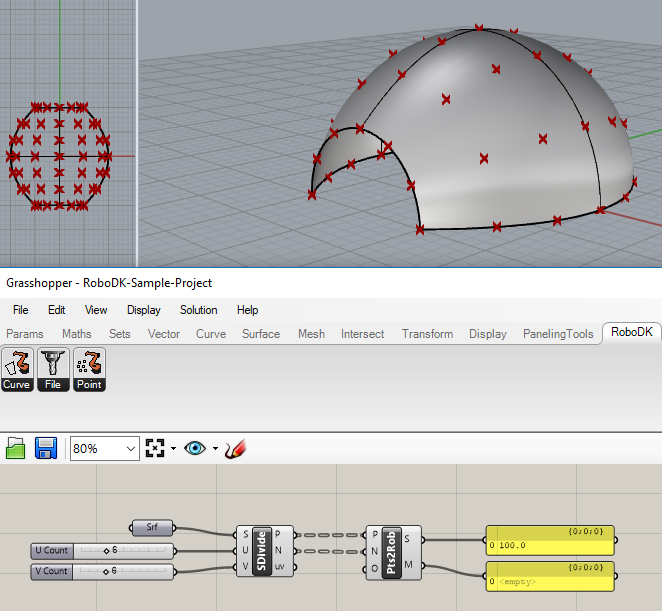
この例では、Grasshopper 用の RoboDK プラグインを使用して、サーフェスを点のグリッドとして分割し、RoboDK でそれらの分割点を追跡しながら穴あけ操作工程を行うする方法を示します。
1.RoboDK プラグイン (3dm ファイルおよび gh ファイル) に組み込まれている Grasshopper サンプルを読み込みます。
Tip: Rhino で Grasshopper を起動するには、Grasshopper コマンドを入力するだけです。
2.Pts2Rob部品を右クリックしRobot Setup Options (RoboDK)を選択します。Load Project…を選択しDefault SetupからサンプルRoboDKステーションをロードします。 (先程のセクションで示したのと同じサンプルプロジェクト).
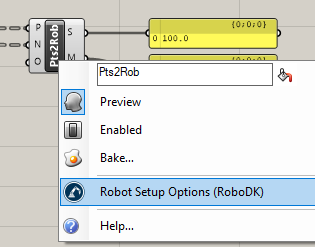
必要に応じて、オブジェクト名をコンポーネント入力 (O) として指定できます。また、コンポーネントオプションでプロジェクトを指定して、該当するRoboDK プロジェクトが各コンポーネントで使用できます。
3.GrasshopperからSolution➔Recompute (F5)でパーツやRoboDKのプログラムを更新します。
Note: RoboDK でロボットのセットアップを更新してください。たとえば、参照フレームまたはツールフレームをダブルクリックして、各ロボット参照またはツールの正しい座標を入力します。
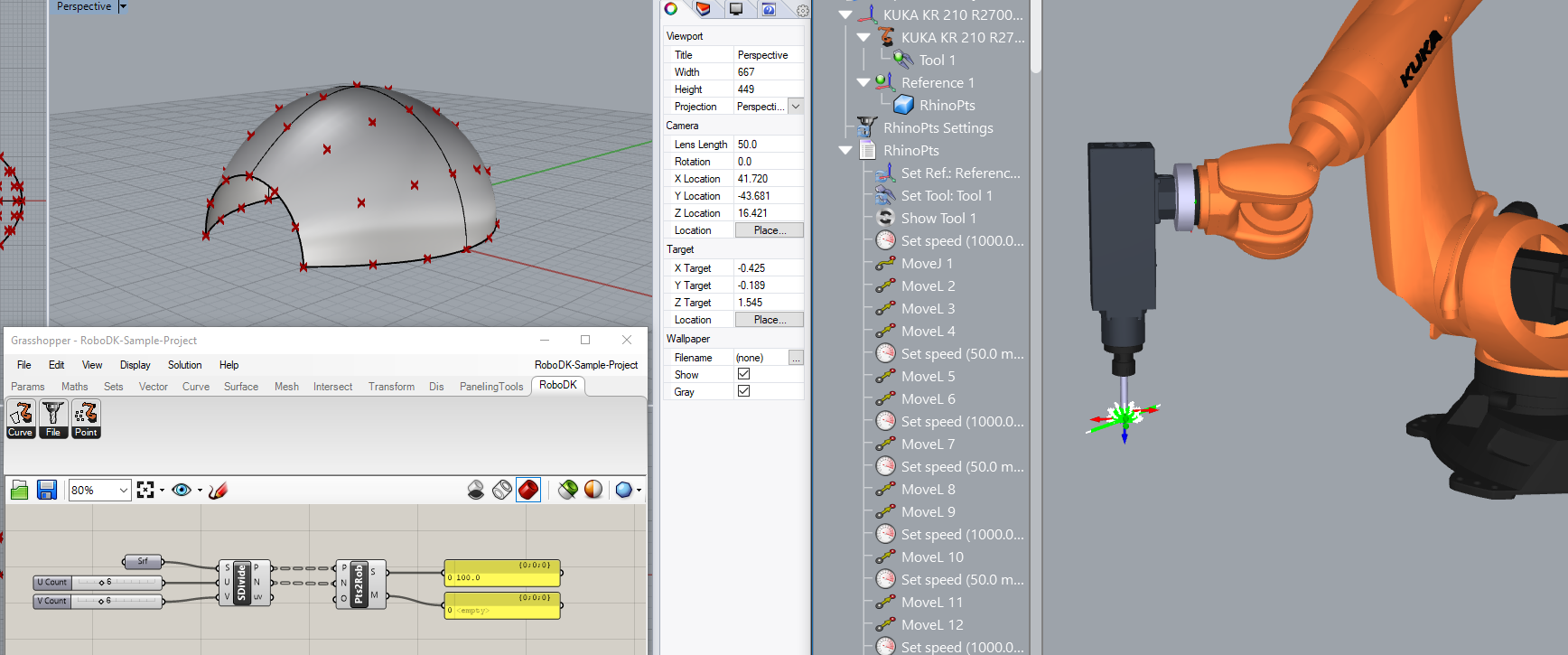
Tip: プログラムを右クリックしShow Instructionsを選択することでプログラム内の命令が表示されデバックが可能になります。Add Instruction.をクリックし手動で命令を追加も可能です。
Tip:プロセッサの選択に関してはPost Processorを参照してください。
Tip:Export Simulation]を選択して、3D HTML または 3D PDF シミュレーションを生成できます。