例
このセクションでは、Rhino プロジェクトを RoboDK に読み込み、ロボット シミュレーションとオフラインプログラミングを示す簡単な例です。
ドーム彫刻工程
Video: Rhino とRoboDK連携しドーム彫刻工程を行います: https://www.youtube.com/watch?v=hgS-CmmGUOI.
ドームストライプ
この例では、サンプルの RoboDK ステーション (デフォルト設定) をロードし、Rhino で定義された一連の曲線をロボットでたどる方法を示します。
1.RhinoでDomeっd例をロードします。
2.Select the RoboDK tab and select 
3.Load Project…を選択します。
4.Default Setupを選択します。RoboDKは自動的に起動しサンプルプロジェクトを開きます。サンプルプロジェクトはKUKAロボット・1 つのツール (スピンドル、Tool1)、参照フレーム1つ(Reference 1)が含まれています。
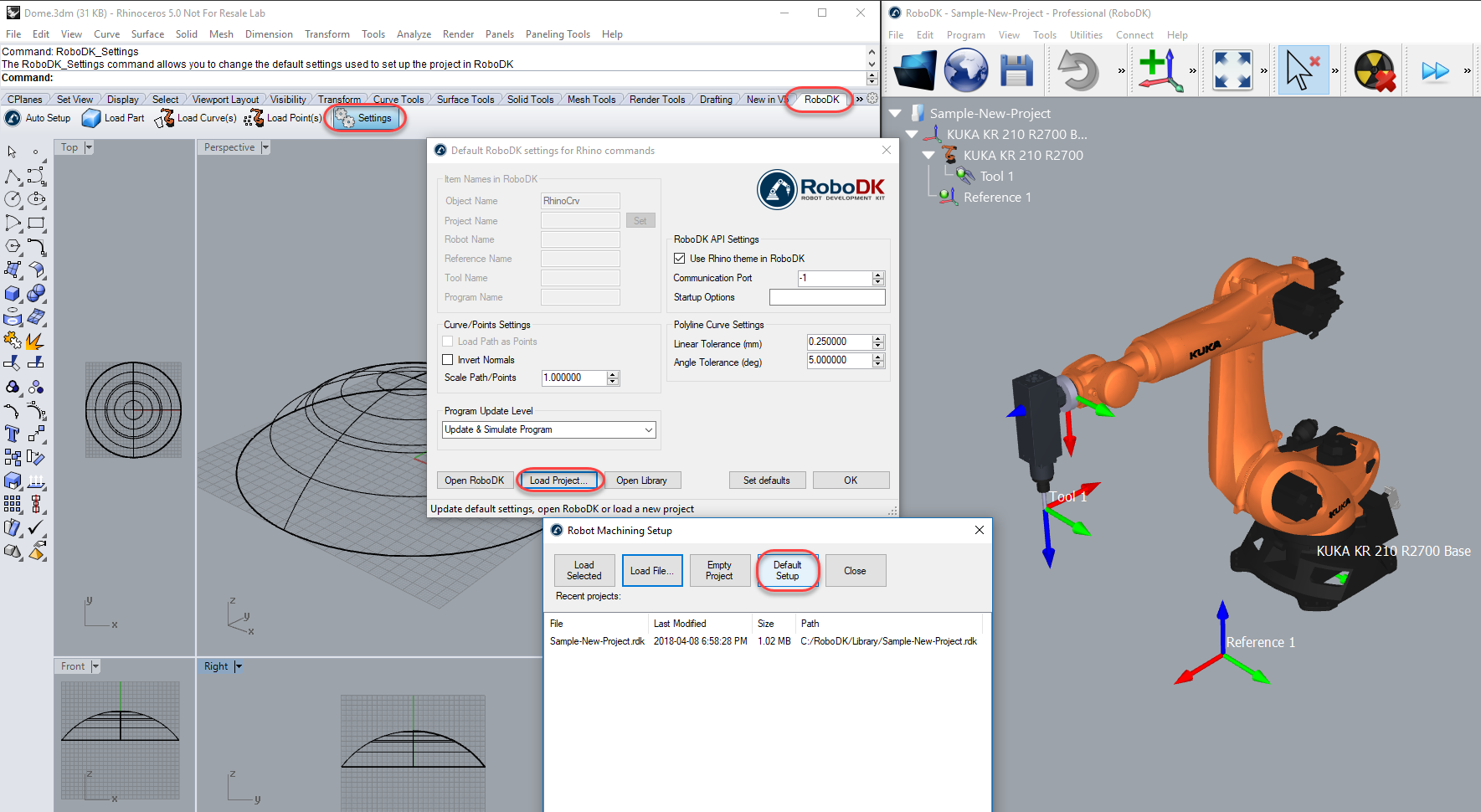
5.ウィンドウを閉じるもしくはOKを選択します。
6.Rhino で
7.すべての曲線とサーフェスを選択し、Enterまたは右クリックをクリックします。下図のように、プロジェクトが RoboDK に読み込まれます。
画面にアクティブされたフレームにパーツがロードされ、RoboDK側はロボットツール(Tool 1)アクティブした新しい曲線追従プロジェクトが生成されます。
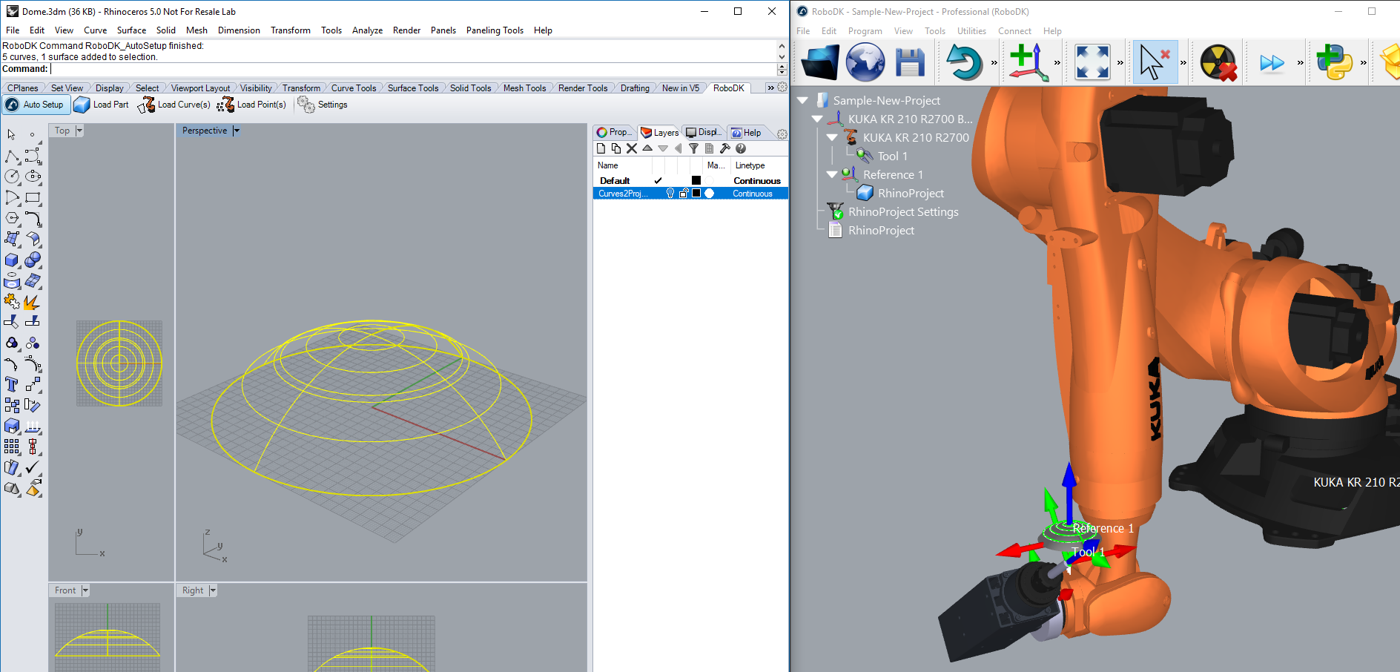
Tip: +または – キーで参照フレームの大きさを調整いただけます。
サーフェス法線が反対方向に抽出されている場合、次の手順に従えば解決できます。
8.
9.Invert Normals.をチェック入れます。
10.OKを選択します。
11.ステップを繰り返しします。
サーフェスの法線が反転し、アプローチの動きがパーツの上部から来るはずです。ロボットはツールパスに沿って問題なく移動できるはずです。
Tip: 3D ビューでAlt キーを押したまま参照フレームまたはロボットを移動できます。

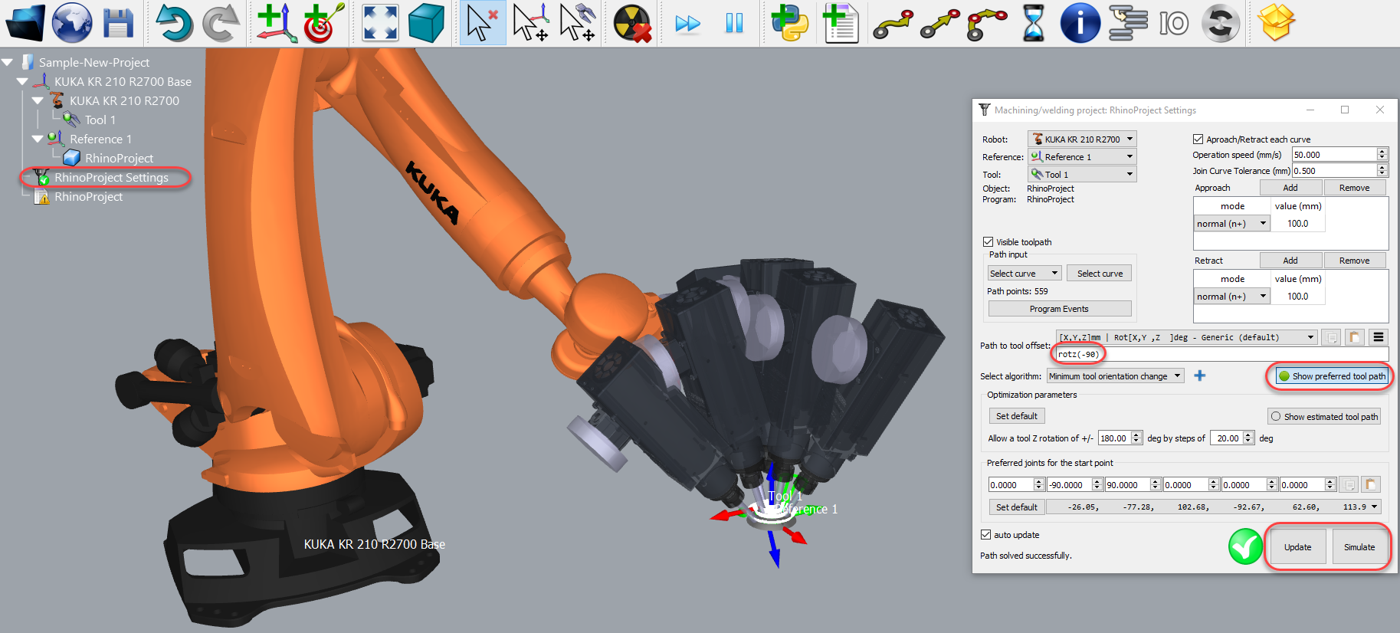
たとえば、Show preferred tool pathを選択して、パーツに対するツールのデフォルトの方向を表示および変更できます。Path to tool offsetを変更して、追加の回転を定義します。新しい値を入力する、またはマウスホイールを使用して結果のクイックプレビューを表示し確認ながら調整します。
詳細については、robot machining sectionを参照してください。
最後に、シミュレーションの結果をプログラムを生成する、もしくはシミュレーションをエクスポートできます。
12.プログラムRhinoProjectを右クリックします。
13.Generate robot program (F6)を選択します。ロボットプログラムは自動生成され画面に表示します。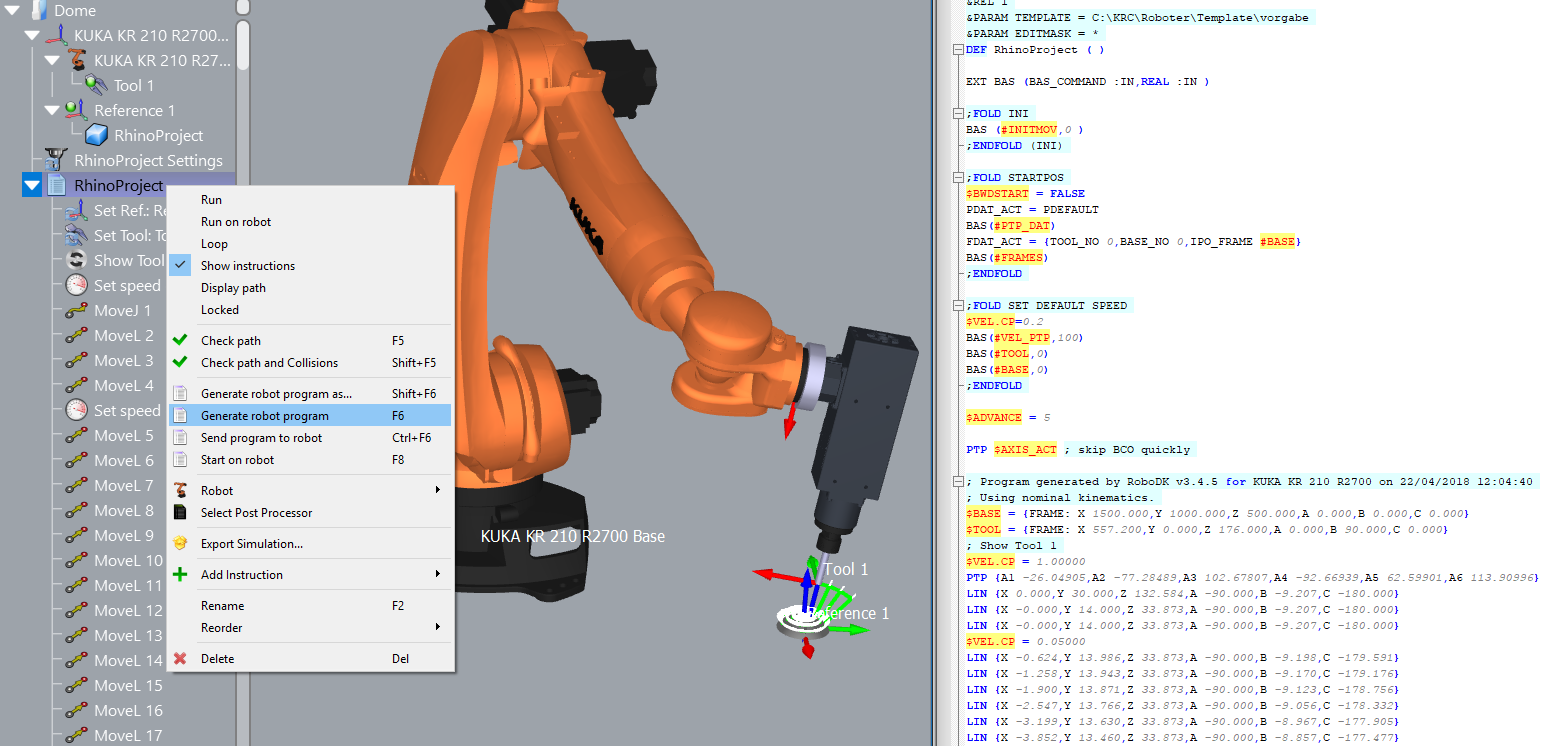
Tip:プログラムを右クリックし、[Show Instructions] を選択して、生成された命令を表示し、プログラムをデバッグします。 [Add Instruction] を選択すると、新しい命令を手動で追加できます。
Tip: .ポストプロセッサの選択に関して、Post Processorのセクションを参照してください。
Tip: Export Simulation]を選択して、3D HTML または 3D PDF シミュレーションを生成できます。
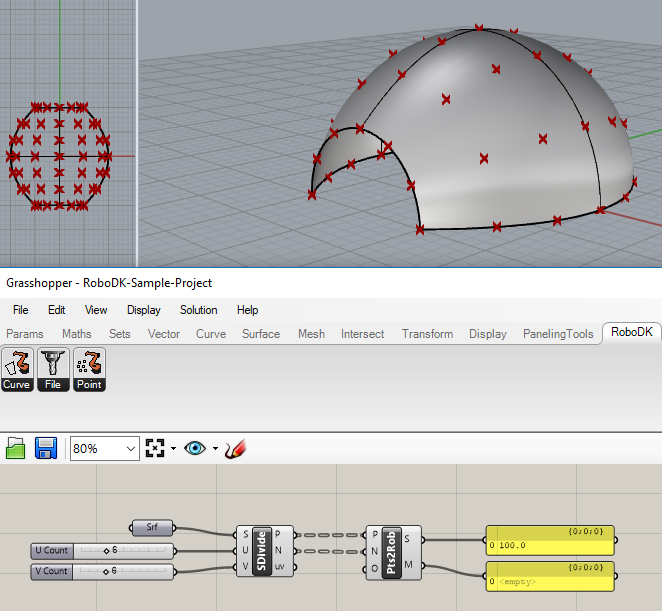
Grasshopper 例
この例では、Grasshopper 用の RoboDK プラグインを使用して、サーフェスを点のグリッドとして分割し、RoboDK でそれらの分割点を追跡しながら穴あけ操作工程を行うする方法を示します。
1.RoboDK プラグイン (3dm ファイルおよび gh ファイル) に組み込まれている Grasshopper サンプルを読み込みます。
Tip: Rhino で Grasshopper を起動するには、Grasshopper コマンドを入力するだけです。
2.Pts2Rob部品を右クリックしRobot Setup Options (RoboDK)を選択します。Load Project…を選択しDefault SetupからサンプルRoboDKステーションをロードします。 (先程のセクションで示したのと同じサンプルプロジェクト).
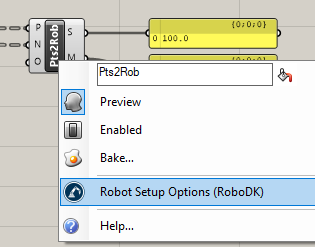
必要に応じて、オブジェクト名をコンポーネント入力 (O) として指定できます。また、コンポーネントオプションでプロジェクトを指定して、該当するRoboDK プロジェクトが各コンポーネントで使用できます。
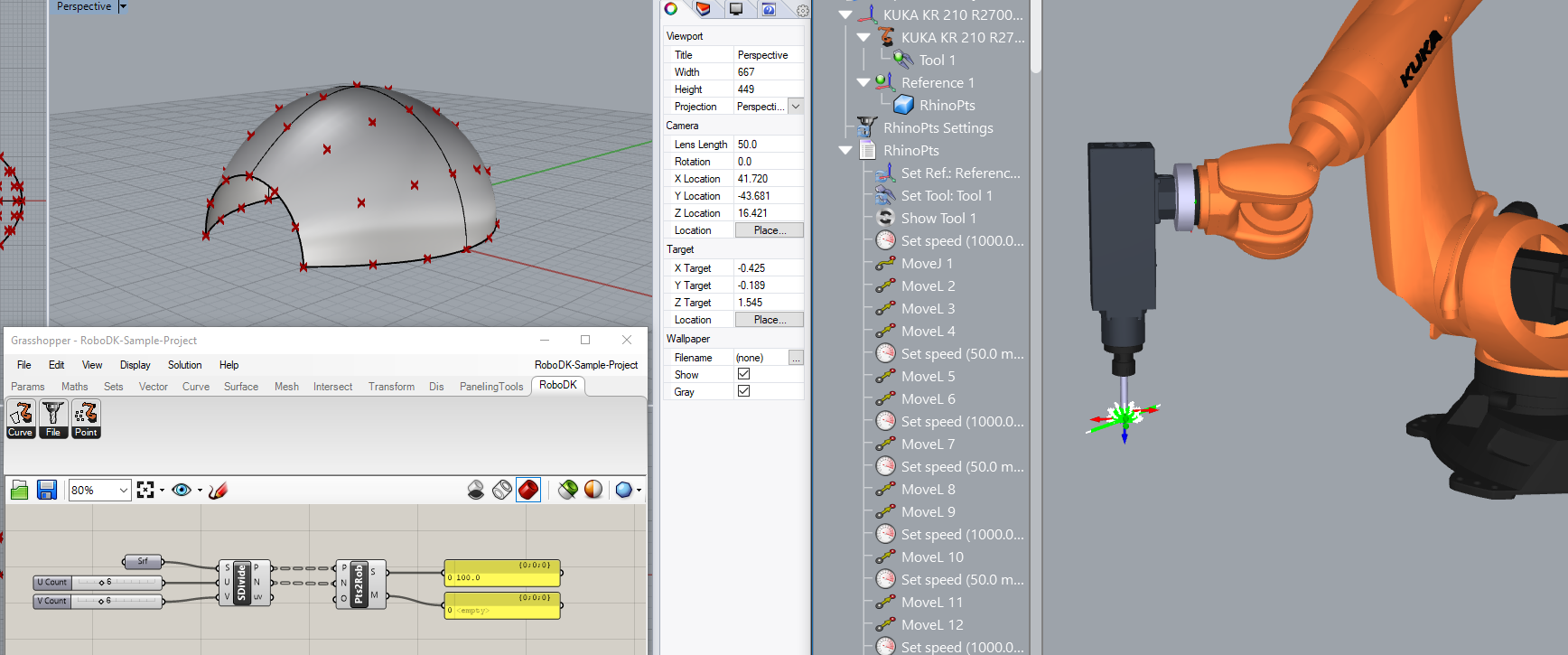
3.GrasshopperからSolution➔Recompute (F5)でパーツやRoboDKのプログラムを更新します。
Note: RoboDK でロボットのセットアップを更新してください。たとえば、参照フレームまたはツールフレームをダブルクリックして、各ロボット参照またはツールの正しい座標を入力します。
Tip: プログラムを右クリックしShow Instructionsを選択することでプログラム内の命令が表示されデバックが可能になります。Add Instruction.をクリックし手動で命令を追加も可能です。
Tip:プロセッサの選択に関してはPost Processorを参照してください。
Tip: Export Simulation]を選択して、3D HTML または 3D PDF シミュレーションを生成できます。