設定
Settingsボタンを選択して、デフォルトの RoboDK プラグイン設定を変更できます。
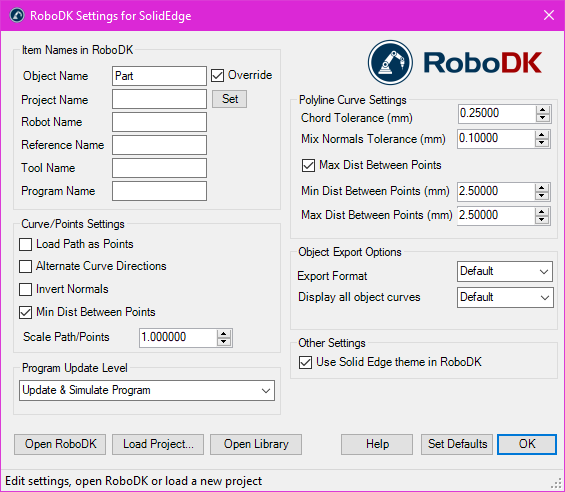
●Object Name – RoboDK に読み込まれる曲線/ポイントオブジェクトの名前を設定します。このケースを空白の場合、パーツまたはアセンブリファイルの名前が使用されます。
●Override –名前が一致する場合は、前回 RoboDK にロードされたオブジェクトをオーバーライドします。
●Project Name –使用する RoboDK プロジェクト/ステーション (.RDK ファイル) の名前/パスを設定します。ファイルが既にロードされている場合は、既存のプロジェクトが使用されます。 RoboDK で開いているプロジェクトがファイル名と一致しない場合、フルパスが指定しプロジェクトが開きます。
●Robot Name –プロジェクトに複数のロボットがある場合、RoboDK で使用されるロボットの名前を設定。ロボット名は、RoboDK ステーションツリーに表示される名前と一致する必要があります。プロジェクト内に使用可能なのロボット1つだけの場合、この値を空 (デフォルト) にしてください。
●Reference Name – Set the name of the reference frame to place the path with respect to the robot. The name should match the visible name in the RoboDK station tree. If a name is not provided, the active Reference Frame
Tip:番号付きの参照フレームを自動的に使用したい場合は、名前の末尾に参照番号を追加してください。例: “Reference 1“。例えば: 'Reference 1'.
●Tool Name –パスをたどるためにロボットで使用するツール (TCP) の名前を設定します。この名前は、RoboDK ステーションツリーに表示される名前と一致する必要があります。名前が指定されていない場合、アクティブされているツールフレーム
Tip: 番号付きのツールを自動的に使用したい場合は、名前の末尾にツール番号を追加してください。例: “Tool1“。
●Program Name – 生成するプログラムの名前とパス名を設定します。
Note: プログラムとコードを生成するオプションを有効してることを確認してください。
●Load Path as Points –曲線をポイントに変換するには、このオプションをオンにして、RoboDK でポイントフォロープロジェクトが作成されるようにします。これは、穴あけなどの製造操作に役立ちます。パスを曲線フォロープロジェクトとしてロードするには、このオプションをオフにします。
●Alternate Curve Directions -このオプションをオンにするより、パスごとに移動方向が交互になります (Zig-Zagパターン)。
●Invert Normals –このオプションをオンにより、計算されたサーフェス法線を反転するし、、ロボットのツールの向きが反転します。
●Use Solid Edge Theme in RoboDK –Solid Edge テーマで RoboDK を起動します。これには、3D ナビゲーションのマウスの動作と背景色の変更が含まれます。これらの設定は、RoboDK メニューTools-Optionsで変更できます。
●Communication Port – RoboDK と通信する通信ポートを設定します。複数のRoboDKインスタンスを同時に実行することの場合、各インスタンスに合わせて異なるポート番号を設定してください。。通信ポートの設定は-1 (デフォルト) に設定すると、デフォルトのポート (20500) が使用されます。
●Startup Options – RoboDK が初回起動されるときに渡す引数を設定します。たとえば、RoboDK をバックグラウンド起動するために「/NOSPLASH /NOSHOW /HIDDEN」を設定できます。その場合、RoboDK が表示されていなくても、プログラムを生成できます。詳細については、RoboDK API のCommand Lineセクションを参照してください。
●Chord Tolerance (mm) –カーブをポイントのセットとして分割する精度を設定します。
●Mix Normals Tolerance (mm) –複数のサーフェス間で通常の計算を混合するために使用される距離の許容値を設定します。
●Export Format –RoboDK にパーツをロードするためのエクスポート形式を設定します。.
●Display all object curves –選択されていない場合でも、RoboDK に読み込まれた曲線を表示するようにします。この設定は RoboDK (Tools-Options-Display-Display Curves) で変更できます。
ボタン:
●Open RoboDK –RoboDK でプロジェクトを開く... 新しいが追加のオプションと共にウィンドウが開きます。
●Load Project … – この部品を使用する場合、RoboDKプロジェクト(RDK ファイル)を読み込んでください。
●Open Library –RoboDKのonline library.を開きます。
●Set Defaults –該当する部品をデフォルト設定にします。
●OK – 該当する設定を適用し、ウィンドウを閉じます。OK を選択しないと、変更した設定は適用されません。