実例
このセクションでは、ロボットシミュレーションとオフラインプログラミングの目的でRoboDKにSolidWorksプロジェクトをロードする基本的な例を示します。
ロボット溶接
次の例は、SolidWorksからロボット溶接用のシンプルなツールパスを作成する方法を示しています。
液体ディスペンシング
次の例は、SolidWorksとRoboDKを使用して液体ディスペンシングアプリケーション用にロボットをプログラミングする方法を示しています。
プロペラの例
この例では、サンプルのRoboDKステーションをロードし(デフォルト設定)、SolidWorksで定義された一連の曲線をロボットで追跡する方法を示します。
1.SolidWorksに3つのブレードプロペラの例をロードします。
2.RoboDKタブを選択し、
3.プロジェクトの読み込みを選択…
4.デフォルト設定を選択します。RoboDKは、KUKAロボット、1つのツール(ツール1としてのスピンドル)、および1つの参照フレーム(参照1)を使用してサンプルプロジェクトを開始してロードします。
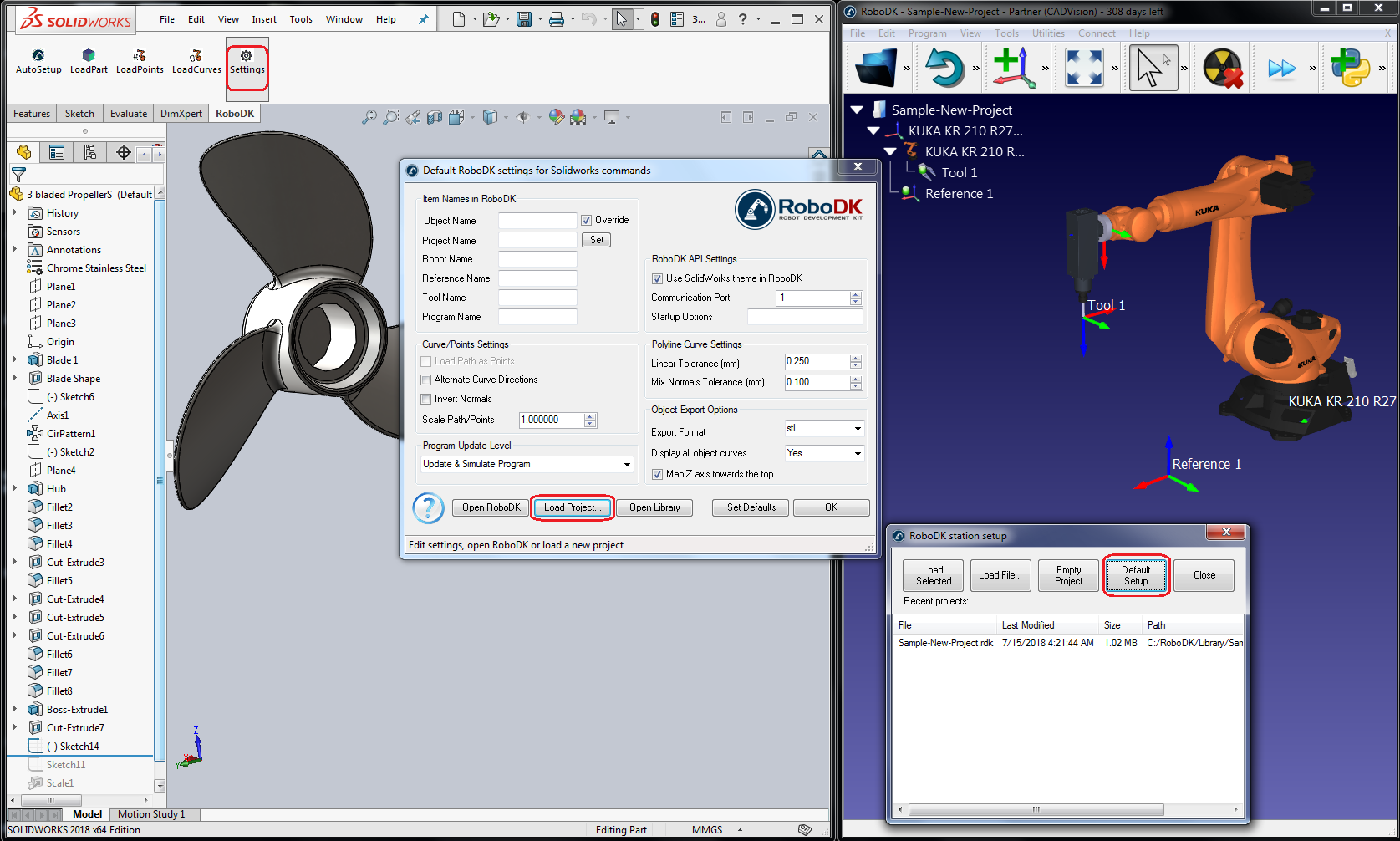
5.[設定]ウィンドウを閉じるか、[OK]を選択します。
6.を選択
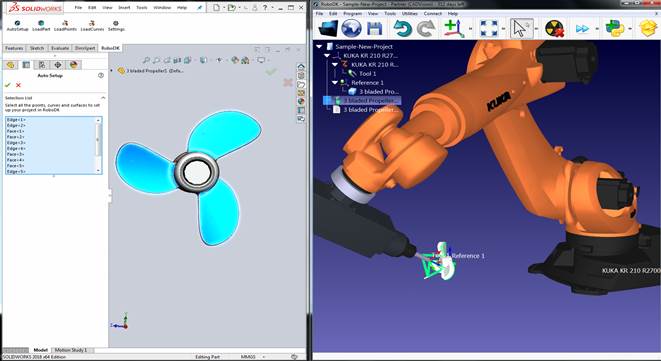
7.すべてのカーブとサーフェスを選択し、プロパティマネージャページで[OK]を押します。次の図に示すように、プロジェクトはRoboDKに読み込まれます。
アクティブな参照フレームにロードされたパーツ(参照1)と、ツールパスに従うRoboDKの新しいCurve followプロジェクトが表示されます。
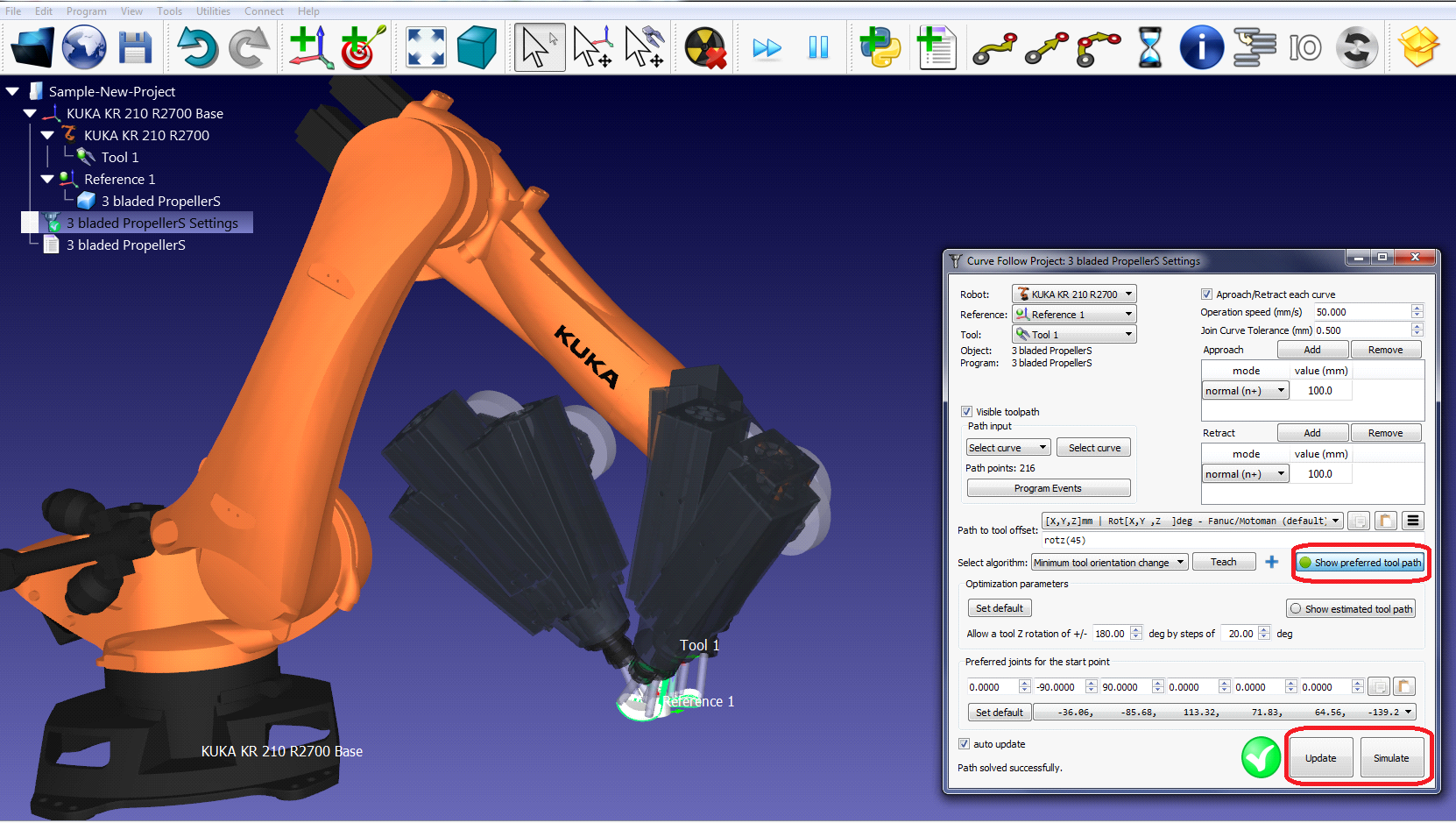
アプローチの動きがツールパスに垂直であることがわかります。ロボットは、問題なくツールパスに沿って移動できるはずです。
ダブルクリック
たとえば、[優先ツールパスを表示]を選択して、パーツに対するツールのデフォルトの方向を確認および変更できます。パスをツールオフセット値に変更して、追加の回転を定義します。これを行うには、新しい値を入力するか、マウスホイールを使用して結果のクイックプレビューを表示します。
これらの設定を変更するための詳細情報は、ロボット加工部門。
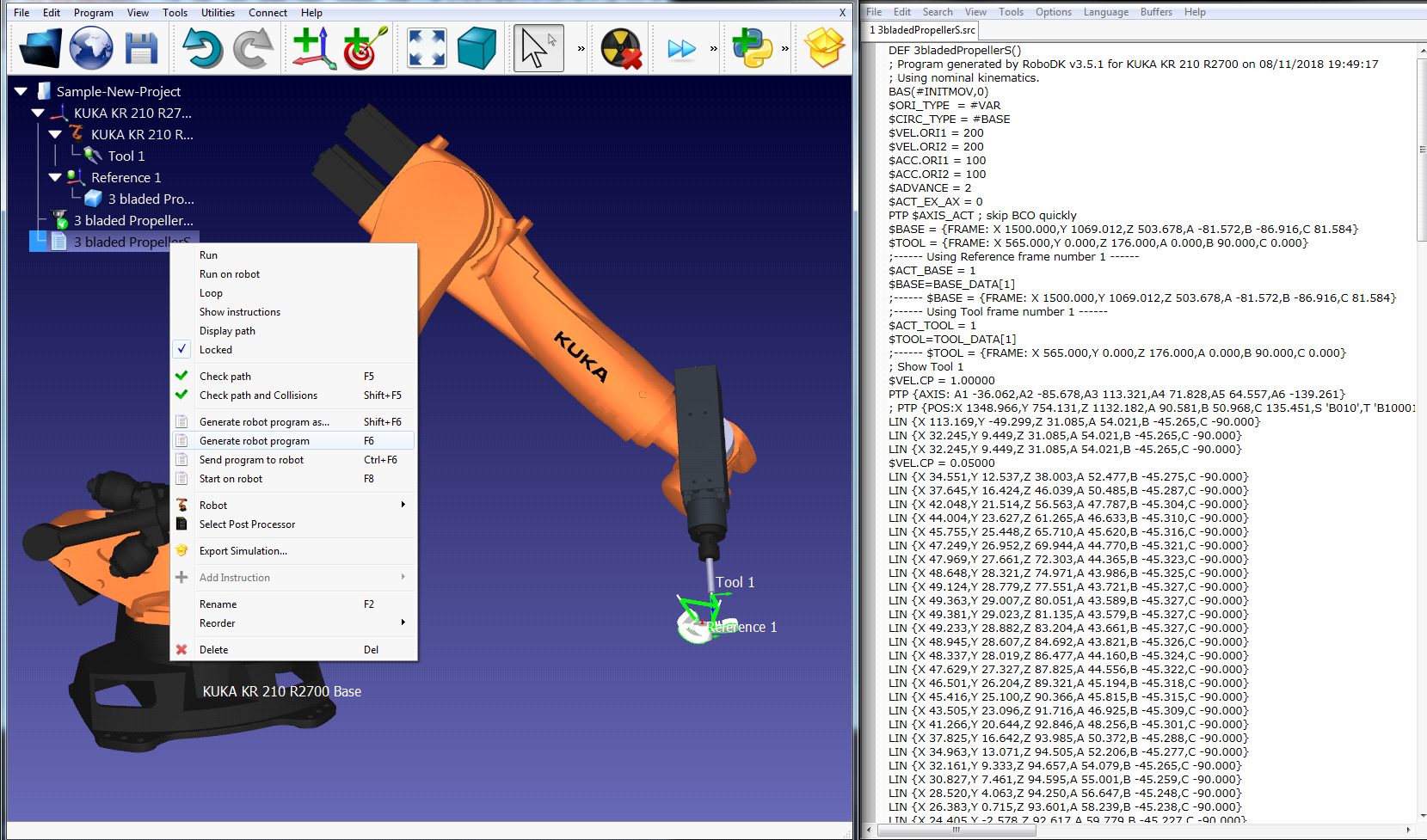
最後に、シミュレーションで目的の結果が得られたら、プログラムを生成するか、シミュレーションをエクスポートできます。
8.プログラムを右クリック
9.[ロボットプログラムの生成(F6)]を選択します。ロボットプログラムが生成され、表示されます。