設定
「設定」ボタンを選択すると、RoboDKプラグインに適用されるデフォルト設定を変更できます。
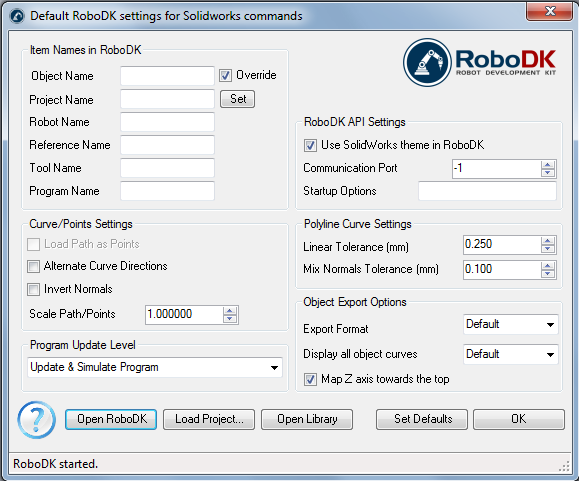
●オブジェクト名– RoboDKにロードされる曲線/ポイントオブジェクトの名前を設定します。このケースを空白のままにすると、パーツまたはアセンブリファイルの名前が使用されます。
●上書き–名前が一致する場合、RoboDKに以前にロードされたオブジェクトをオーバーライドします。
●プロジェクト名–使用するRoboDKプロジェクト/ステーション(.RDKファイル)の名前/パスを設定します。ファイルが既にロードされている場合は、既存のプロジェクトが使用されます。RoboDKで開いているプロジェクトがファイル名と一致しない場合、フルパスを指定するとプロジェクトが開きます。
●ロボット名– RoboDKで使用されるロボットの名前を設定します(プロジェクトに複数のロボットがある場合)。ロボット名は、RoboDKステーションツリーに表示される名前と一致する必要があります。使用可能な最初または唯一のロボットを使用するには、この値を空(デフォルト)のままにします。
●参照名 - ロボットに対するパスを配置するための参照フレームの名前を設定します。名前は、RoboDKステーションツリーに表示される名前と一致する必要があります。名前が指定されていない場合、アクティブな参照フレーム
●ツール名– パスをたどるためにロボットで使用するツール(TCP)の名前を設定します。名前は、RoboDKステーションツリーに表示される名前と一致する必要があります。名前が指定されていない場合、アクティブなツールフレーム
●プログラム名– 生成されるプログラムファイルの名前を設定します。
注意:プログラムを表示するためのプログラムとコードを生成するオプションを必ず選択してください。
●パスをポイントとしてロード– カーブをポイントに変換するには、このオプションをオンにします。ポイントフォロープロジェクトRoboDKで作成されます。これは、穴あけなどの製造作業に役立ちます。このオプションをオフにすると、パスがカーブフォロープロジェクト。
●代替曲線方向-このオプションをチェックすると、パスごとに移動方向が交互になります(ジグザグパターン)。
●法線を反転– このオプションをオンにすると、計算されたサーフェス法線が反転します。これにより、ロボットのツールの向きが反転します。
●RoboDKでSolidWorksテーマを使用する– SolidWorksテーマでRoboDKを起動します。これには、3Dナビゲーション用のマウスの動作と背景色の変更が含まれます。これらの設定は、RoboDKメニューの[ツール]-[オプション]で変更できます。
●通信ポート– RoboDKと通信するように通信ポートを設定します。RoboDKの複数のインスタンスを同時に実行し、異なるポートを使用する場合は異なる設定を使用できます。この値を-1(デフォルト)に設定すると、デフォルトのポート(20500)が使用されます。
●起動オプション– RoboDKを初めて起動するときに渡す引数を設定します。たとえば、RoboDKを静かに開始するには、「/ NOSPLASH / NOSHOW / HIDDEN」を設定します。RoboDKが表示されていなくても、プログラムを生成できます。詳細については、コマンドライン RoboDK APIのセクション。
●線形許容差(mm)– 線形精度を設定して、曲線を点のセットとして分割します。
●法線許容差(mm)– 複数のサーフェス間で通常の計算を混合するために使用される距離許容差を設定します。
●エクスポート形式– RoboDKにパーツをロードするためのエクスポート形式を選択します。
●すべてのオブジェクトカーブを表示– RoboDKにロードされたカーブが選択されていなくても表示します。この設定は、RoboDK(ツール-オプション-表示-曲線の表示)で変更できます。
●Z軸を上に向けてマッピング–部品またはアセンブリに回転を適用して、RoboDKのZ軸に一致させます。これにより、RoboDKのアイソメビューがSolidWorksと同じになるようにします。
ボタン:
●RoboDKを開く– RoboDKでプロジェクトを開く...新しいウィンドウが開き、追加のオプションが表示されます。
●プロジェクトの読み込み…– 現在のプロジェクトで使用するRoboDKプロジェクト(RDKファイル)をロードします。
●オープンライブラリ– RoboDKを開くオンライン図書館。
●デフォルトの設定–コンポーネントのデフォルト設定を設定します。
●OK - これらの設定を適用して、このウィンドウを閉じます。[OK]を選択しないと、変更した設定は適用されません。