hyperMILL
hyperMILL/hyperCAD-Sでは、RoboDKプラグインを使用してRoboDKに加工ジョブを送信することができます。これにより、ロボット加工用のロボットのシミュレーションとプログラミングが可能になります。
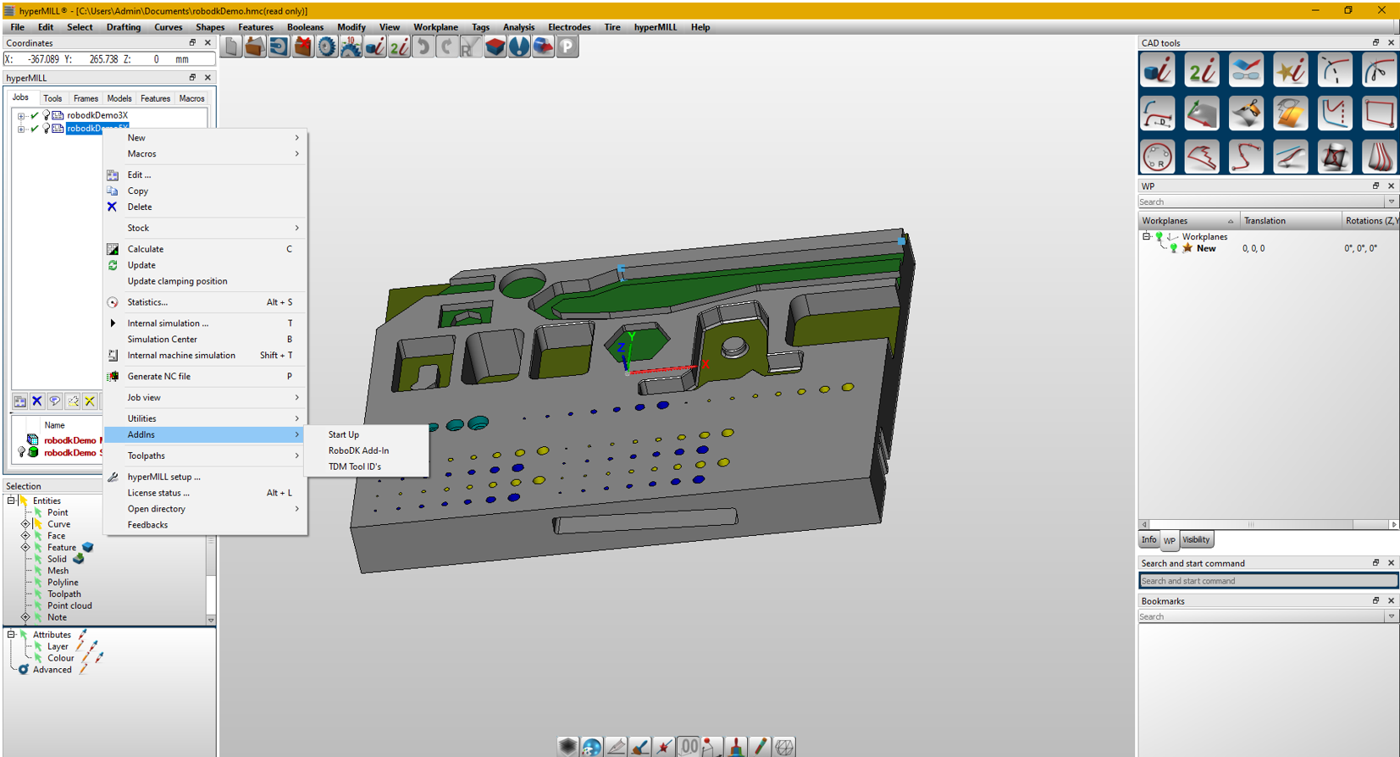
以下の手順に従って、hyperMILL/hyperCAD-Sからロボット加工プロジェクトを自動的にセットアップしてください:
1.仕事を右クリックしてください。
2.Add-inを選択します。
3.RoboDKアドインを選択します。
注意:RoboDK に加工ジョブを送信する場合は、3 軸機用の DIN_ISO ポストプロセッサを使用してください。5軸アディティブマニュファクチャリングには APT_R05a_E03 というポストプロセッサを使用してください。
選択したロボットでプログラムが実行可能な場合、緑のチェックマークが表示されます。何か問題(特異点、軸の限界、リーチの問題など)がある場合は、赤いマークが表示され、問題のメッセージが表示されます。
ロボット加工プロジェクト
プログラムを右クリックし、Run を選択してシミュレーションを行います(またはプログラムをダブルクリックします)。また、Generate robot program (F6) を選択して、ロボットコントローラにロードする必要のあるロボットプログラムを取得することもできます。ロボットプログラムの生成方法についての詳細は、オフラインプログラミングのセクションを参照してください。
必要であれば、プログラムを右クリックし、「ポストプロセッサーを選択」を選択して、ポストプロセッサーを変更してください。この手順は、生成されたコードの外観をカスタマイズするのに役立ちます。ポストプロセッサの選択とカスタマイズの詳細については、ポストプロセッサのセクションを参照してください。