RoboDK RRS for Comau (
RoboDK RRS for Comau は Comau ロボット専用の RoboDK Add-in です。RoboDK Add-in をインストールするには、ドキュメントの Add-in セクションを参照してください。
Comau から必要な RCS モジュールを入手し、有効化したら、RoboDK RRS for Comau Add-in を使い始めることができます。
RSSプログラムを作成するには、以下の手順に従ってください:
1.Program➔ RRS for Comau➔ Settings で設定を開きます。
a.ロボットIDを設定します。通常は0です。
b.ロボットフォルダへのパスを設定します。これは通常、.c5g、.CIO、.xmlファイルを含むメインフォルダです。
c.ロボットファイルへのパスを設定します。これはロボットフォルダに含まれる.c5gファイルです。
d.RRS DLLファイル(通常はrcscomau.dll)へのパスを設定します。
2.プログラムを右クリックして RRS プログラムを生成➔ RRS プログラムを生成(Comau)
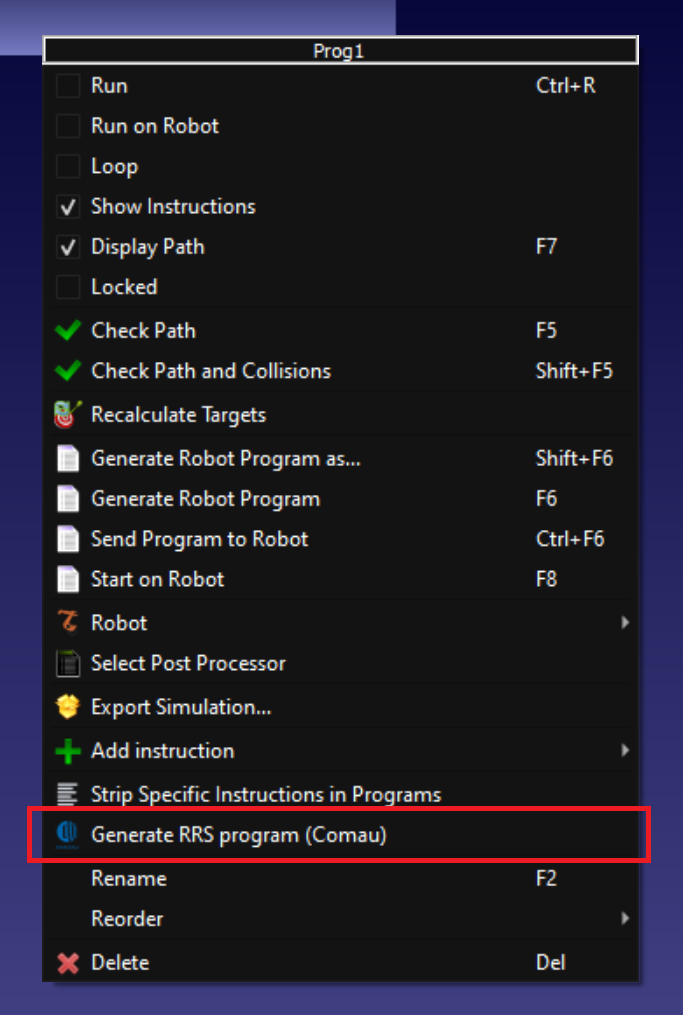
新しいプログラムは正確なジョイントで作成され、サイクルタイムの見積もりはプログラム名で提供されます。
注:RoboDKはmm/sとdeg/sの速度コマンドを提供します。しかし、Comau を含むいくつかのロボットコントローラはパーセント(%)を使用します。RRS で解析される入力プログラムはパーセントを使用する必要があります。