リアルロボットシミュレーション(RRS)
Realistic Robot Simulation (RRS)は、正確なロボットシミュレーションとサイクルタイムの予測を可能にする規格です。このRRS規格により、シミュレーションやオフラインプログラミングソフトウェアにオリジナルのコントローラソフトウェアを統合することができます。
RoboDK 用 RRS アドインは、既存の RoboDK シミュレーションやプログラムに正確なロボット経路とサイクルタイムを追加します。このRRSアドインを使うと、ロボットメーカーのロボットコントローラソフトウェア(RCS)モジュールと直接インターフェースをとることができます。RCS は基本的にロボットメーカーが独自に開発したモーションプランニングソフトウェアです。
RoboDK RRSアドインを使用すると、RoboDK内で正確なツールパスとサイクルタイムを生成し、ロボットの動作を高精度にシミュレーションすることができます。
ビデオこのビデオは RoboDK と Comau https://www.youtube.com/watch?v=4SUItWlXVX0 の RRS インテグレーションを紹介しています。
要求事項
RoboDK でRRS サポートを有効にするには、まずロボットメーカーから RCS モジュールを入手する必要があります。これは通常、別売りのライブラリ(Windows ではdll ファイルなど)です。
注意:RoboDKはロボットメーカーのRCSモジュールを提供するものではありません。
ロボットメーカーのRCSモジュールは、C:⇄RoboDK⇄api⇄RRS⇄%BRAND⇄に配置することを推奨します。ただし、ソースパスはAdd-inで指定できます。
RoboDK RRS インターフェース
RoboDK は、ロボットメーカーの RCS の RRS-1 実装への Python インターフェースを提供します。さらに、RoboDK と RRS インターフェース間のやりとりに必要なユーティリティやベースラインも提供します。
RRSの実装は異なるロボットメーカー間でも一貫しているはずですが、インターフェースによって提供されるベースラインは、特定のブランド向けに多少の微調整が必要な場合があります。RoboDKはRRSインターフェースのベンダー固有の実装を提供します。
RoboDK RRS for Comau (アドイン)
RoboDK RRS for Comau は Comau ロボット専用の RoboDK Add-in です。RoboDK Add-in をインストールするには、ドキュメントの Add-in セクションを参照してください。
Comau から必要な RCS モジュールを入手し、有効化したら、RoboDK RRS for Comau Add-in を使い始めることができます。
RSSプログラムを作成するには、以下の手順に従ってください:
1.Program➔ RRS for Comau➔ Settings で設定を開きます。
a.ロボットIDを設定します。通常は0です。
b.ロボットフォルダへのパスを設定します。これは通常、.c5g、.CIO、.xmlファイルを含むメインフォルダです。
c.ロボットファイルへのパスを設定します。これはロボットフォルダに含まれる.c5gファイルです。
d.RRS DLLファイル(通常はrcscomau.dll)へのパスを設定します。
2.プログラムを右クリックして RRS プログラムを生成➔ RRS プログラムを生成(Comau)
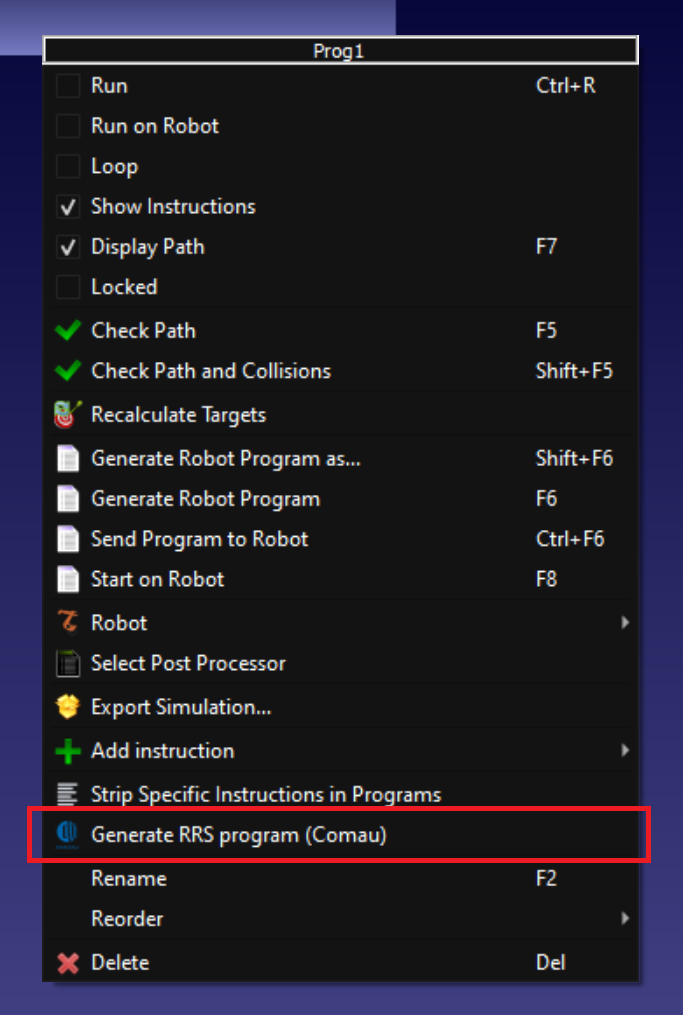
新しいプログラムは正確なジョイントで作成され、サイクルタイムの見積もりはプログラム名で提供されます。
注:RoboDKはmm/sとdeg/sの速度コマンドを提供します。しかし、Comau を含むいくつかのロボットコントローラはパーセント(%)を使用します。RRS で解析される入力プログラムはパーセントを使用する必要があります。