C
C#用のRoboDK APIは、RoboDKクラスを含むRoboDK.csソースファイルです(Pythonのロボリンククラス)、RoboDK.Itemクラス(PythonのRobolink.ItemクラスAPI)、およびポーズ変換で操作するマトリックス操作のためのMatrixクラス(RoboDK.Mat)などのロボット工学用の他のツール。
C#(「Cシャープ」と発音)は、Microsoftによって開発され、.NET Frameworkで実行されるさまざまなアプリケーションを構築するために設計されたプログラミング言語です。C#はシンプルで、強力で、タイプセーフで、オブジェクト指向です。のメインセクション このドキュメントの最初の部分では、ロボットプログラミングにC#などの広く使用されているプログラミング言語でRoboDK APIを使用する利点について説明します。
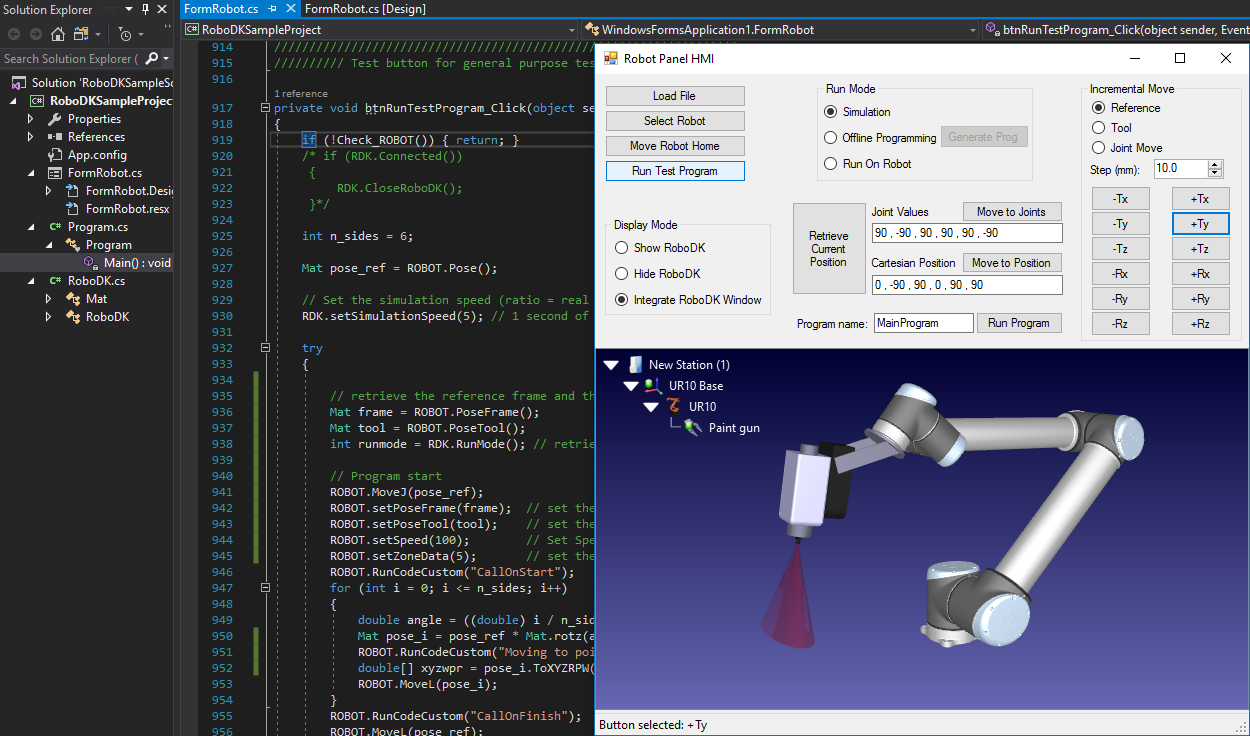
C#用のRoboDK APIには、次の画像に示すサンプルプロジェクトが付属しています(完全なソースコードが含まれています)。これをNuGetパッケージとして使用して、任意の.Netプロジェクトに統合することもできます。
[ファイルのロード]を選択して、RoboDKステーションまたはRoboDKでサポートされているその他のファイルを開きます。ロボットがロードされると、それに応じてROBOT変数が更新されます(選択ロボットの使用と同じ)。
注意: サンプルプロジェクトをロードして実行するには、Microsoft Visual Studioが必要です。Visual Studio Community(Express)バージョンは無料です。
C#シミュレーション
C#プログラムは、ロボットコマンド(MoveJ、MoveL、setDOなど)を使用すると、デフォルトでシミュレーションされます。サンプルC#プロジェクトが開始されると、デフォルトでシミュレーションモードも選択されます。
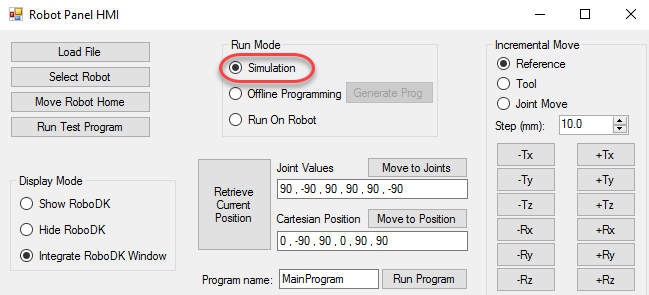
これは、ロボットの動きがRoboDKでシミュレートされることを意味します。たとえば、右側のボタン(+ Tx、-Tx、…)を選択してロボットを10 mmステップで移動したり、[テストプログラムの実行]を選択してロボットの現在の場所を中心に六角形の動きを実行したりできます。
ブレークポイントを設定して、アプリケーションをデバッグし、ロボットターゲットを検査します。ロボットターゲットは、関節座標またはマット変数(4x4ポーズマトリックス)として定義でき、XYZWPR形式として検査して、プログラムの問題をトラブルシューティングできます。のリファレンスフレームの詳細参照フレーム セクション。

実行モードを次のように変更することもできます。オフラインプログラミング または オンラインプログラミング (ロボットで実行)、次のセクションに示すように。
C#OLP
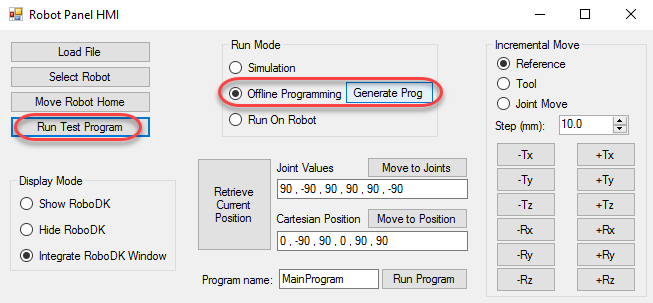
C#プログラムは、ロボットのシミュレーションに使用したものと同じC#コードを使用してオフラインで生成できます(オフラインプログラミング)。この機能をテストするには、次の手順に従います。
1.実行モードセクションでオフラインプログラミングを選択します
2.[テストプログラムの実行]またはその他の動きの組み合わせを選択します
3.ベンダー固有のロボットプログラムを取得するには、[プログラムの生成]を選択します
この場合、プログラムはシミュレーションされませんが、結果を取得するためにすばやく実行されます。これは、ロボットコントローラに固有のロボットプログラムです。プログラムが生成されると、実行モードはシミュレーションに戻ります。
注意:オフラインプログラミングモードがアクティブな場合、ロボットは動きません。RunMode に示すように、RUNMODE_MAKE_ROBOTPROGに Python OLP セクション。
C#オンラインプログラミング
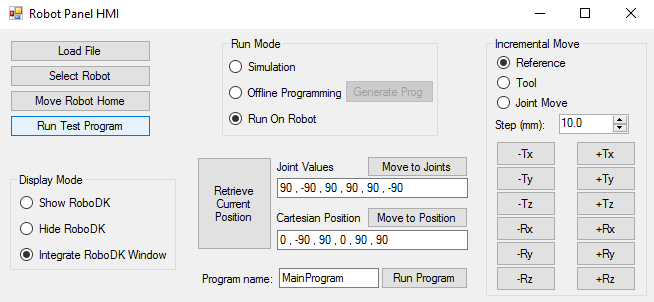
C#プログラムは、シミュレーションで使用したものと同じC#コードを使用して、ロボットで直接実行できます。オンラインプログラミングでは、ロボットドライバーを使用して、特定のロボットコントローラーで汎用プログラムを実行できます。次の手順に従って、C#サンプルプロジェクトを使用してこの機能をテストします。
1.[実行モード]セクションで[ロボットで実行]を選択します
2.ロボットを動かす他のコマンドを選択します
動きは実際のロボットで実行され、シミュレータは動きをロボットと同期させます。
注意:のRunModeRDK / Robolink接続のをRUNMODE_RUN_ROBOTに変更して、ロボットで動作を実行できるようにします。例:
RDK = Robolink();
RDK.setRunMode(RUNMODE_RUN_ROBOT);
注意:のAPIによるロボットドライバーの使用に関する詳細情報 ロボットドライバーセクション。