C
C#プログラムは、ロボットコマンド(MoveJ、MoveL、setDOなど)を使用すると、デフォルトでシミュレーションされます。サンプルC#プロジェクトが開始されると、デフォルトでシミュレーションモードも選択されます。
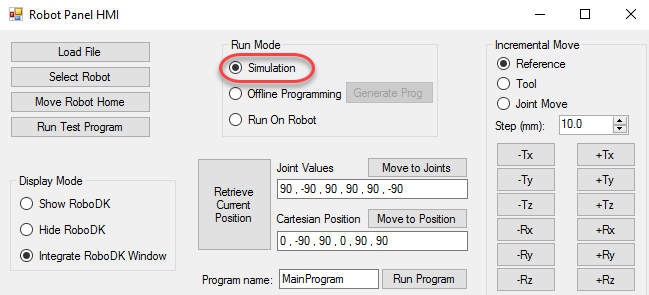
これは、ロボットの動きがRoboDKでシミュレートされることを意味します。たとえば、右側のボタン(+ Tx、-Tx、…)を選択してロボットを10 mmステップで移動したり、[テストプログラムの実行]を選択してロボットの現在の場所を中心に六角形の動きを実行したりできます。
ブレークポイントを設定して、アプリケーションをデバッグし、ロボットターゲットを検査します。ロボットターゲットは、関節座標またはマット変数(4x4ポーズマトリックス)として定義でき、XYZWPR形式として検査して、プログラムの問題をトラブルシューティングできます。のリファレンスフレームの詳細参照フレーム セクション。

実行モードを次のように変更することもできます。オフラインプログラミング または オンラインプログラミング (ロボットで実行)、次のセクションに示すように。