Python
この例では、URロボットを使用して新しいステーションを作成し、ロボットで六角形の動きをシミュレートする方法を示します。
1.ファイルを選択➔
2.UR10ロボットを開く
3.ファイルを選択➔
4.Paint_gun.toolファイルを開きます。
5.サンプルPythonプログラムを開くSampleOfflineProgramming.py C:/ RoboDK / Library / Macros /から
ヒント:でRoboDKステーションをセットアップするための詳細情報 入門 セクション。
ヒント:プログラムを選択➔
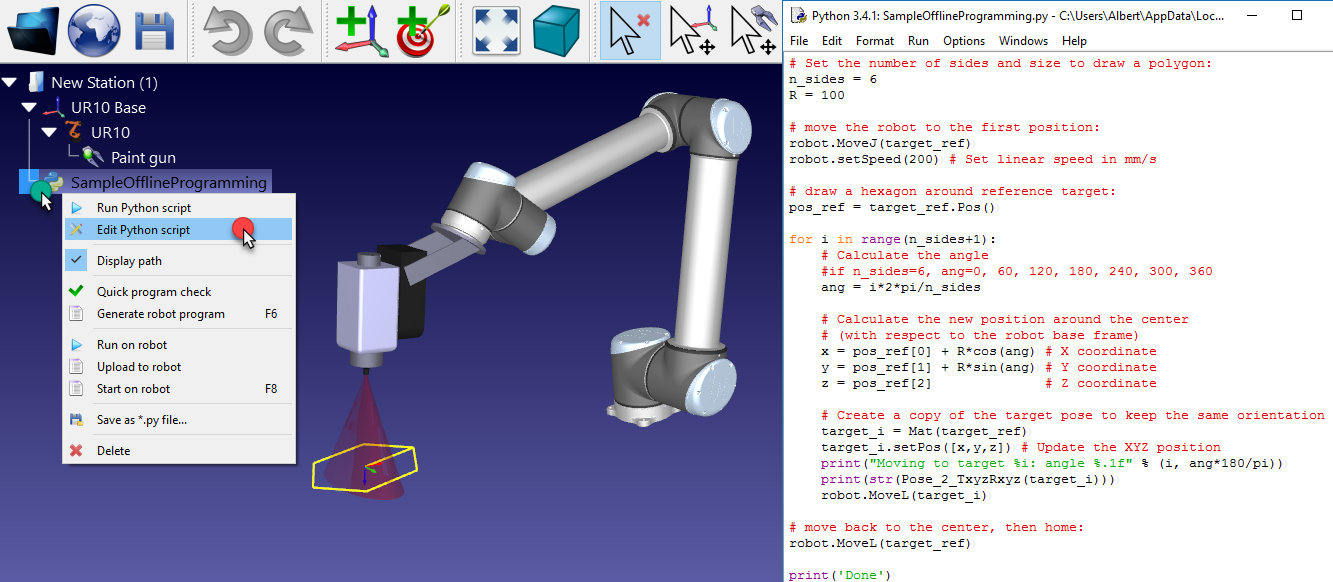
6.SampleOfflineProgrammingアイテムをダブルクリックしてシミュレーションを実行します。ロボットはロボットの現在の位置の周りに六角形を描く必要があり、TCPのトレースは黄色で表示されます。
または、プログラムを右クリックして、
7.右クリック
SampleOfflineProgrammingマクロは、ロボットのリファレンスフレームを基準にして、ロボットの現在の位置に辺n_sidesと半径Rのポリゴンを描画します。必要に応じて、ポリゴンの寸法を変更してロボットを別の場所に移動し、プログラムを再実行します。
この例は、 オフラインプログラミング Webサイトのセクション(ビデオを含む)。
ヒント: [実行]を選択すると、Pythonエディターからプログラムを実行できます➔実行します。新しいウィンドウが表示され、すべての印刷コマンドまたはエラーが表示されます。