RoboDK CNC
RoboDK CNCは、大きなプログラムをロボットコントローラに送ることができます。
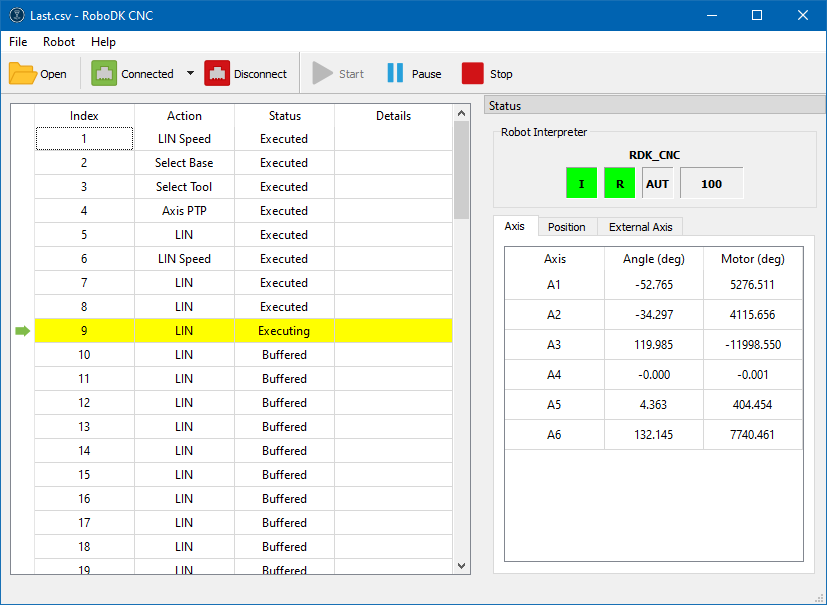
RoboDK CNCのメインウィンドウには以下の要素が含まれています:
1.メインメニュー
2.ツールバー
3.指導表
4.ステータスパネル
メインメニューとツールバーの操作は重複しています。
| オープン | RoboDK CNC ポストプロセッサ を使用して生成された CSV ファイルを開きます。 |
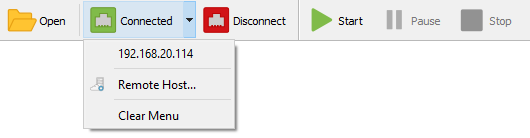
| 接続 | このアイコンは、現在ロボット制御システムに接続されていないことを示します。このボタンを押すと、接続履歴メニューが開きます。 |
| リモートホスト... | この操作により、リモートロボット制御システムの IP アドレスとポートに接続するための [New Connection] ダイアログボックスが表示されます。 |
| 接続 | このアイコンはロボット制御システムに接続しようとしていることを示します。 |
| 接続済み | このアイコンはロボット制御システムへの接続が成功したことを示します。 |
| 切断 | この操作により、ロボット制御システムへの接続が即座に中断されます。RoboDK CNCが切断された後もロボットが動き続けることがありますのでご注意ください。 |
| スタート | 最初の命令でロボットの動作を開始します。または、以前に開始したプログラムの実行を継続します。 |
| 一時停止 | 以前に起動したプログラムの実行を一時停止します。 |
| 停止 | プログラムの実行をキャンセルし、ロボットの動作を停止します。 |









ステータスパネルには、現在実行中のKRLプログラム、準備完了および速度オーバーライドのインジケータ、現在のロボット位置に関する情報が表示されます。
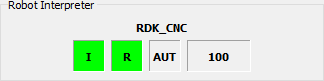
ロボットインタープリターパネルには4つのインジケーターがあります:
ロボット駆動とモーション |
| ロボットのドライブがオンになり、ロボットが動く準備が整いました。 |
| ロボットのアクチュエータがオフになり、ロボットが操作できる状態になりません。 | |
KRLプログラム状況 |
| ロボットプログラムが読み込まれていません。 |
| ロボットプログラムがロードされ、実行準備が整いました。 | |
| ロボットプログラム実行中。 | |
| ロボットプログラムがエラーにより中断されました。 | |
| ロボットのプログラムは完全に実行されました。 | |
ロボットコントローラーモード |
| ロボット制御システムの現在の動作モード。以下の値を取ることができます:T1、T2、AUT、EXT。 |
速度オーバーライド |
| プログラム実行速度のオーバーライド値を0~100のパーセントで指定します。 |








