RoboDK CNC
RoboDK CNCはロボットをCNCのように使用するためのツール集です。RoboDK CNC では、ストリーミングモードで行数無制限までの大規模なプログラムを実行することができます。大規模なプログラムは通常、CAD/CAM システムを使用し、加工にロボットを使用した結果として発生します。
ほとんどのロボット制御システムのリソースは非常に限られており、大きなプログラムをメモリにロードすることはできません。RoboDK CNCは、これらの座標を1つずつ、またはサブプログラムのグループとして制御システムに送信することで、このような制限を解消します(ドリップフィーディングとも呼ばれます)。
RoboDK では、KUKA ロボットコントローラ上で大規模なロボット加工プロジェクトを実行するための専用アドイン(RoboDK CNC)を提供しています。RoboDKはまた、この戦略を実現するために、いくつかのコントローラ専用のポストプロセッサも提供しています。
RoboDK CNCアドインのインストール
すでに RoboDK にAdd-In Manager プラグインがインストールされている場合は、RoboDK オンラインライブラリからアドインをインストールするだけです。
注:このアドインは現在KUKAコントローラーでのみ動作します。他のロボットコントローラーには対応するポストプロセッサーを使用してください。
注記: このアドインは、Tools➔ Add-insメニュー(Shift + I)を使用してPluginCNC.dllライブラリをアタッチすることで、手動で有効にすることができます。
C3 Bridge Interface Server がロボット制御システムにインストールされている必要があります。詳しくはRoboDK driver for KUKA をご覧ください。
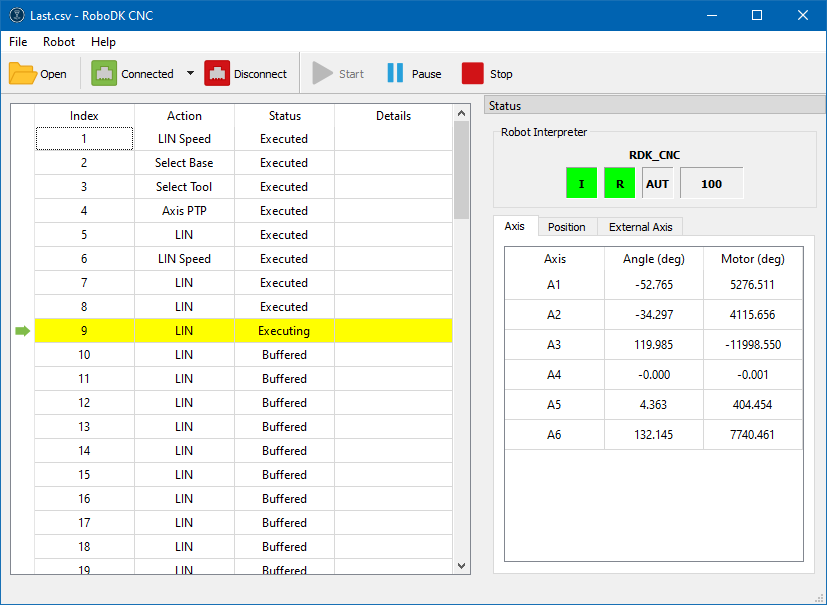
RoboDK CNC ユーザーインターフェース
RoboDK CNCは、大きなプログラムをロボットコントローラに送ることができます。
RoboDK CNCのメインウィンドウには以下の要素が含まれています:
1.メインメニュー
2.ツールバー
3.指導表
4.ステータスパネル
メインメニューとツールバーの操作は重複しています。
| オープン | RoboDK CNC ポストプロセッサ を使用して生成された CSV ファイルを開きます。 |
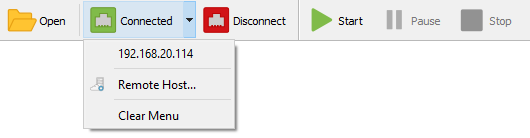
| 接続 | このアイコンは、現在ロボット制御システムに接続されていないことを示します。このボタンを押すと、接続履歴メニューが開きます。 |
| リモートホスト... | この操作により、リモートロボット制御システムの IP アドレスとポートに接続するための [New Connection] ダイアログボックスが表示されます。 |
| 接続 | このアイコンはロボット制御システムに接続しようとしていることを示します。 |
| 接続済み | このアイコンはロボット制御システムへの接続が成功したことを示します。 |
| 切断 | この操作により、ロボット制御システムへの接続が即座に中断されます。RoboDK CNCが切断された後もロボットが動き続けることがありますのでご注意ください。 |
| スタート | 最初の命令でロボットの動作を開始します。または、以前に開始したプログラムの実行を継続します。 |
| 一時停止 | 以前に起動したプログラムの実行を一時停止します。 |
| 停止 | プログラムの実行をキャンセルし、ロボットの動作を停止します。 |









ステータスパネルには、現在実行中のKRLプログラム、準備完了および速度オーバーライドのインジケータ、現在のロボット位置に関する情報が表示されます。
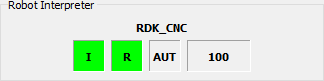
ロボットインタープリターパネルには4つのインジケーターがあります:
ロボット駆動とモーション |
| ロボットのドライブがオンになり、ロボットが動く準備が整いました。 |
| ロボットのアクチュエータがオフになり、ロボットが操作できる状態になりません。 | |
KRLプログラム状況 |
| ロボットプログラムが読み込まれていません。 |
| ロボットプログラムがロードされ、実行準備が整いました。 | |
| ロボットプログラム実行中。 | |
| ロボットプログラムがエラーにより中断されました。 | |
| ロボットのプログラムは完全に実行されました。 | |
ロボットコントローラーモード |
| ロボット制御システムの現在の動作モード。以下の値を取ることができます:T1、T2、AUT、EXT。 |
速度オーバーライド |
| プログラム実行速度のオーバーライド値を0~100のパーセントで指定します。 |









ワークフロー例
このセクションでは、RoboDK CNCを使用してKUKAコントローラ上でプログラムを実行する手順について説明します。
1.RoboDK CNCアプリケーションを起動します。プラグインを有効にした状態で、ユーティリティ➔ RoboDK CNCを選択します。
ヒント: RoboDK CNCポストプロセッサを使ってプログラムを作成すると、このアプリケーションが自動的に開かれることがあります。
2.C3 Bridge Interface Serverが動作している状態で、リモートロボットコントロールシステムに接続します。
3.初めてアプリケーションを起動する場合、またはロボット制御システムでRoboDK CNCを使用したことがない場合は、起動前に自動設定を行う必要があります。メニューRobot➔ Configure... を使って実行してください。
4.RoboDK CNCポストプロセッサで生成されたCSVプログラムファイルを開きます。
5.ロボットの運転準備が整っていることを確認してください:ドライブのスイッチがオンになっていること、希望の運転モードと速度設定が設定されていること。
6.Startボタンを押すとプログラムの実行が始まります。