要件
自動ツールキャリブレーションを行うには、RoboDK TwinToolアプリをインストールし、互換性のあるセンサーを用意する必要があります。
以下のものをご用意ください:
1.1つまたは複数のロボットアーム。
2.互換性のあるダイヤルゲージ(LVDTまたはリニアゲージとも呼ばれます)。
3.RoboDKソフトウェアがインストールされ、自動ロボットキャリブレーション用の適切なライセンスが利用可能である必要があります。
4.ロボットコントローラには互換性のあるロボットドライバが必要です。
5.RoboDK TwinToolアプリをインストールします:
a.RoboDK TwinTool アプリのダウンロード (ダウンロードリンクはRoboDKにお問い合わせください)
b.ファイルをダブルクリックしてアプリをインストールし、RoboDKで開きます。
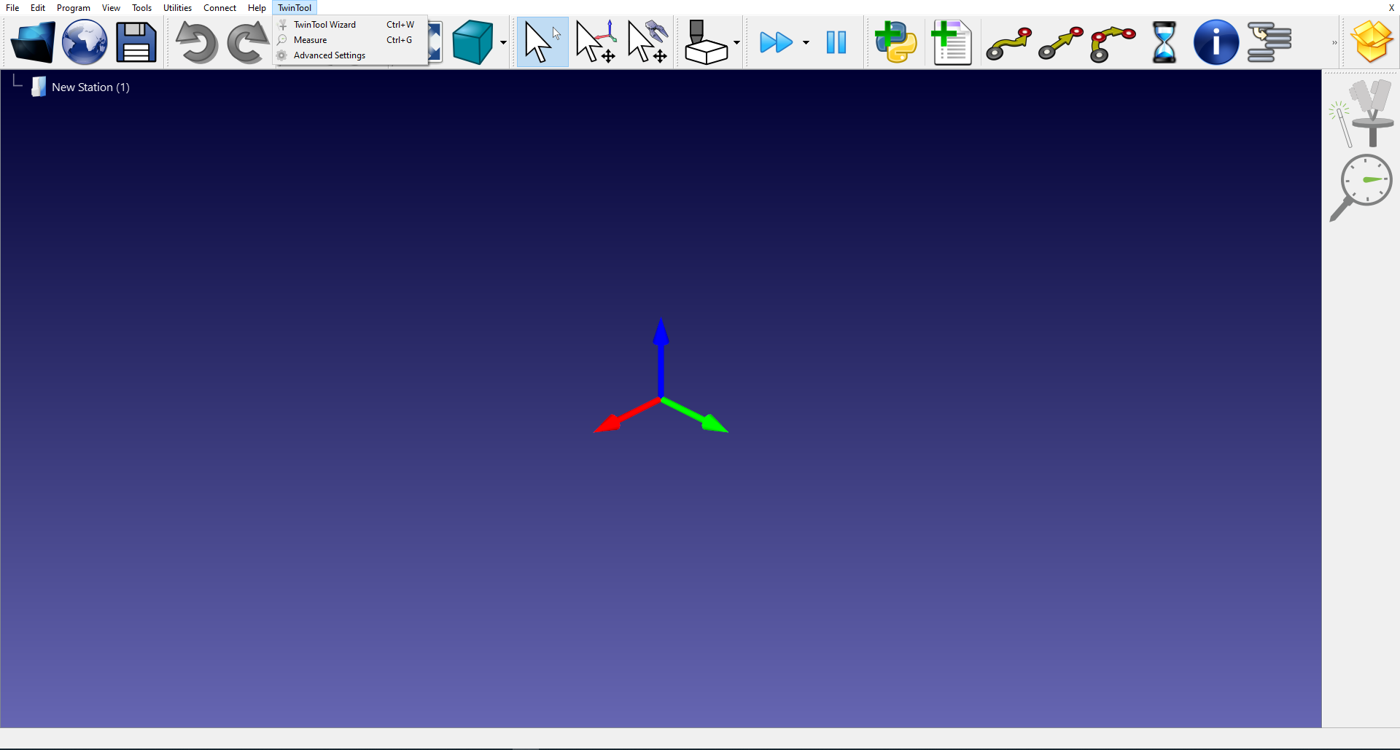
c.Tools➔ Apps を選択し、TwinToolをダブルクリックするとTwinToolツールバーとメニューが表示されます
TwinToolアプリが表示されない場合は、アプリを正しくインストールするために、一旦RoboDKを終了し、管理者権限で再度RoboDKを起動してください。
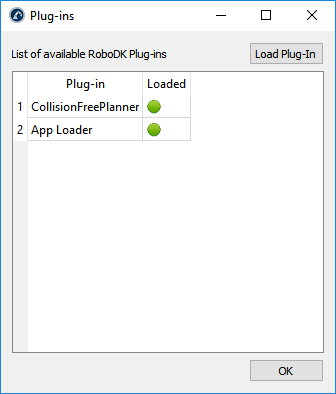
注意: RoboDK アプリは App Loader プラグインを有効にする必要があります。このプラグインは rdkp ファイルをダブルクリックすると自動的にロードされます。そうでない場合は、ツール➔ ロードプラグインから App Loader プラグインをロードしてください。
重要: TwinToolアプリは、自動的に依存関係をダウンロードしてインストールするため、アクティブなインターネット接続が必要です。ただし、これらの依存関係を別のコンピュータからダウンロードすることは可能です。
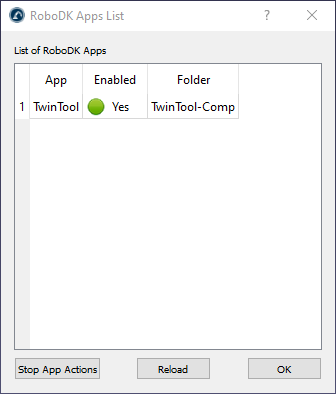
注: TwinToolメニューとツールバーが自動的に表示される場合があります。TwinToolアプリ(または他のアプリ)を表示または非表示にするには、[ツール]➔ [アプリ一覧]を選択し、アプリの[有効]タグをダブルクリックします。