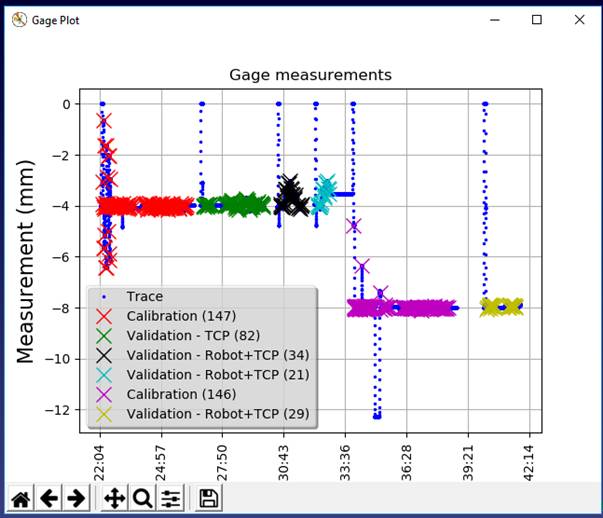
キャリブレーション結果
校正シーケンスが完了すると、ウィザードの
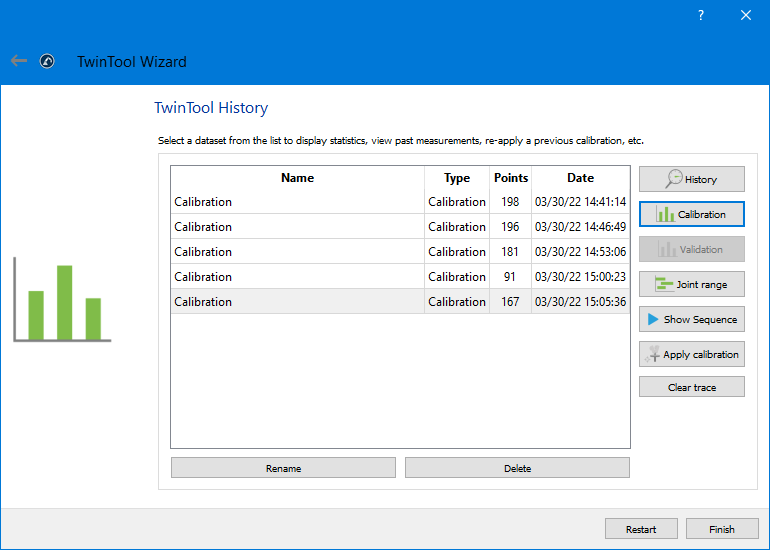
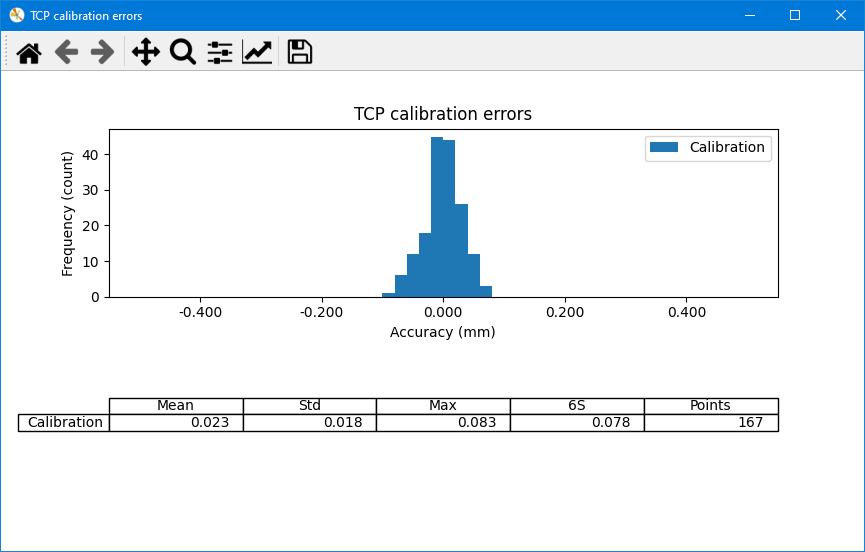
キャリブレーションボタンをクリックすると、キャリブレーション結果を示すチャートが表示されます。ツールセンターポイント(TCP)は公称のロボットキネマティクスを使用して計算されます。
注: TwinTool➔
ヒント:最高の精度結果を得たい場合は、異なるロボット構成でツールのキャリブレーションを行うことが重要です。例えば、最初にロボットをフリップポジション(ジョイント5マイナス)でキャリブレーションシーケンスを実行した場合、フリップポジションでない(ジョイント5プラス)新しいターゲットをティーチングし、再度キャリブレーションシーケンスを実行します。