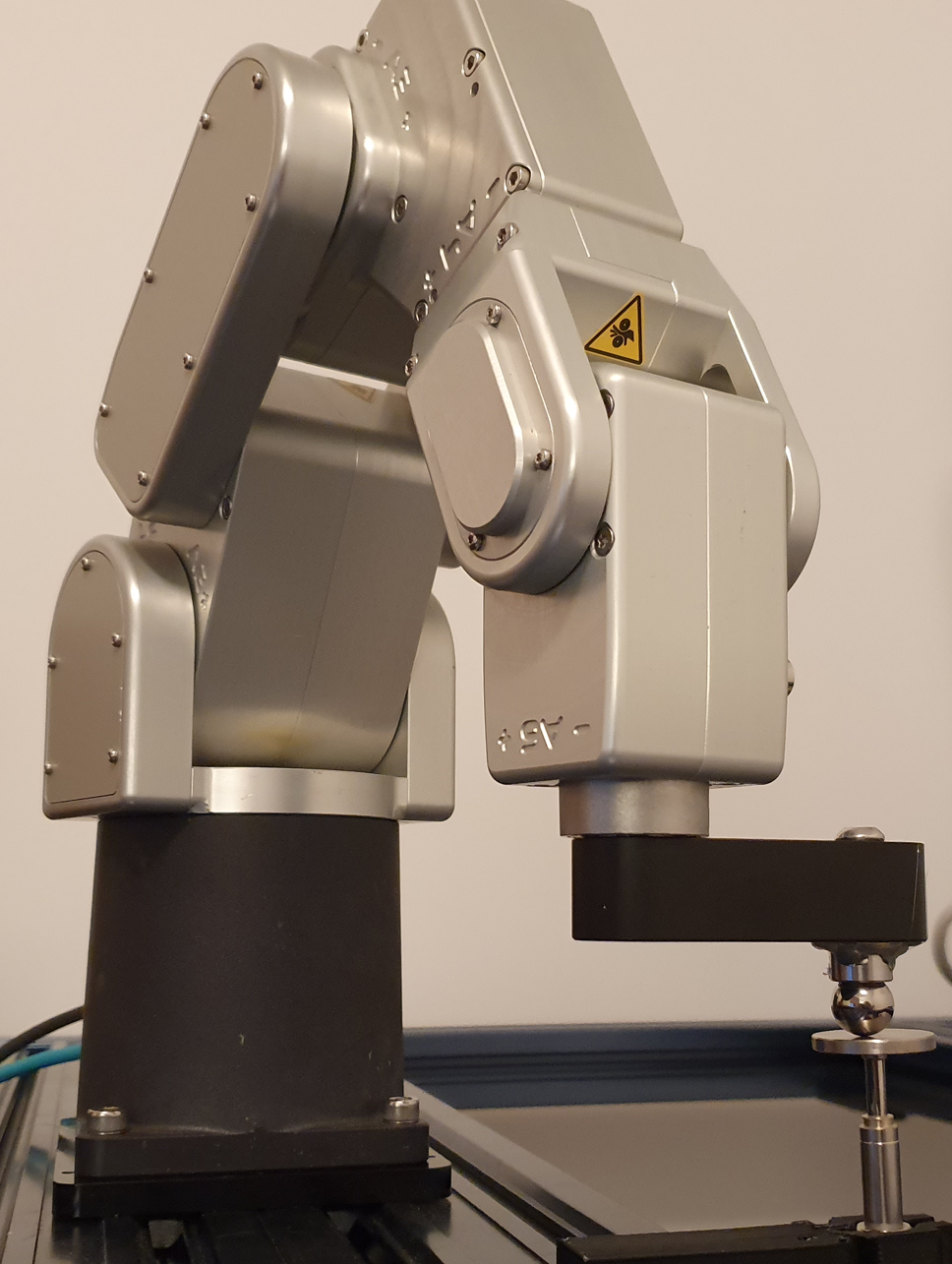
キャリブレーションセットアップ
TwinToolを使ってツール(TCP)をキャリブレーションするには、RoboDKでロボットをロードし、センサーとロボットが接続されていることを確認する必要があります。オプションで、オブジェクトやツールの3Dモデルを追加してセルをモデル化することができます。これにより、自動的に衝突を回避することができます。
1.ロボットをロードします:
a.ファイル➔ オンラインライブラリを開く を選択します。オンラインライブラリがRoboDKに表示されます。
b.フィルターを使ってロボットをお探しください。
c.開く」を選択すると、RoboDK ステーションにロボットが自動的にロードされます。
d.あるいは、ライブラリ(https://robodk.com/library)からロボットファイルを直接ダウンロードし、そのファイルをRoboDKで開きます(.robotファイル)。
2.センサーを接続します:
a.センサーをコンピュータに接続します。
b.TwinTool➔
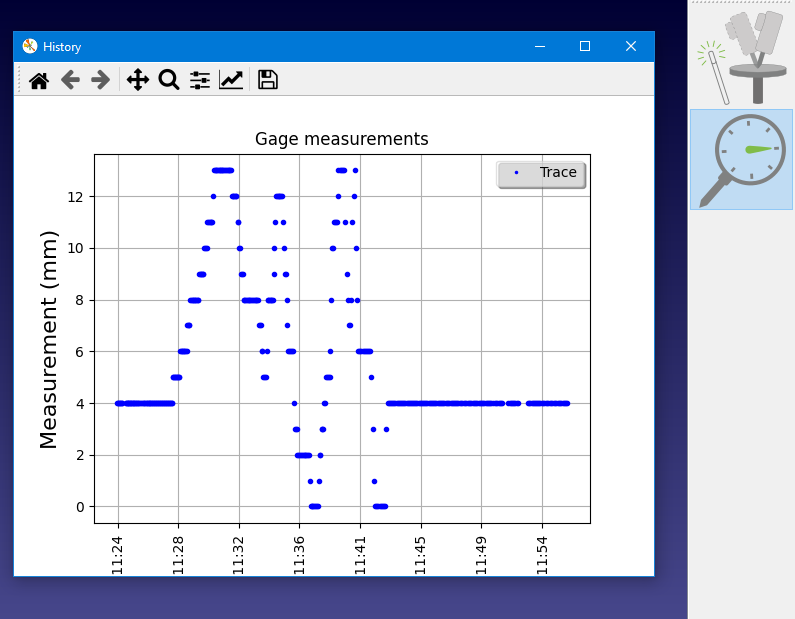
c.センサーが測定中であること、測定値が安定していることを確認してください。
注:すぐにセンサーに接続できない場合は、次のステップで接続設定を編集し、後で使用するために保存することができます。
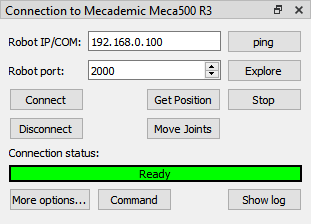
3.ロボットを接続します:
a.接続➔ 接続ロボットを選択します。
b.ロボットのIPとポートを入力してください。
c.接続を選択します。
注:ロボットコントローラによっては、特定のセットアップまたは特定のソフトウェアオプションに従う必要があります。詳しくはロボットドライバーのセクションをご覧ください。
4.ロボット接続パネルから位置取得を選択します。このステップでRoboDKのロボットの位置が更新されます。
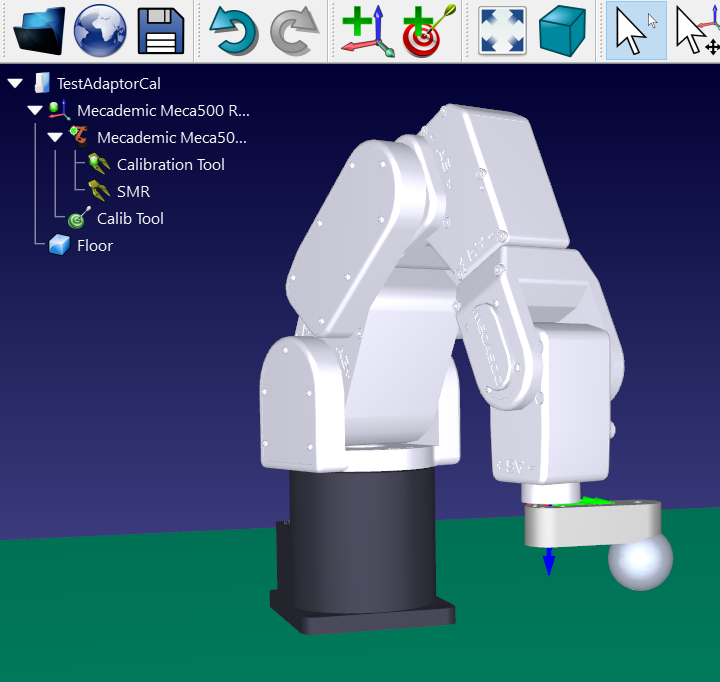
カスタマイズセットアップ
オプションで以下のステップを踏んで細胞の3D環境を適切にモデリングすることができます。
1.ツールの3Dモデルを読み込み、RoboDKでツールを作成します。詳細はツールを作成するセクションをご覧ください。
2.任意の3Dファイルを読み込んでセルをモデリングします。3D STEP、IGES、STLファイルを読み込むことができます。詳しくは、使い始めのセクションをご覧ください。
注:衝突を避けるために、セルを適切にモデル化することを強く推奨します。
ヒント: 工具の中心点を正しく推定しておけば、RoboDKでそれを設定し、推定した工具を更新することで、キャリブレーションをより迅速に行うことができます。
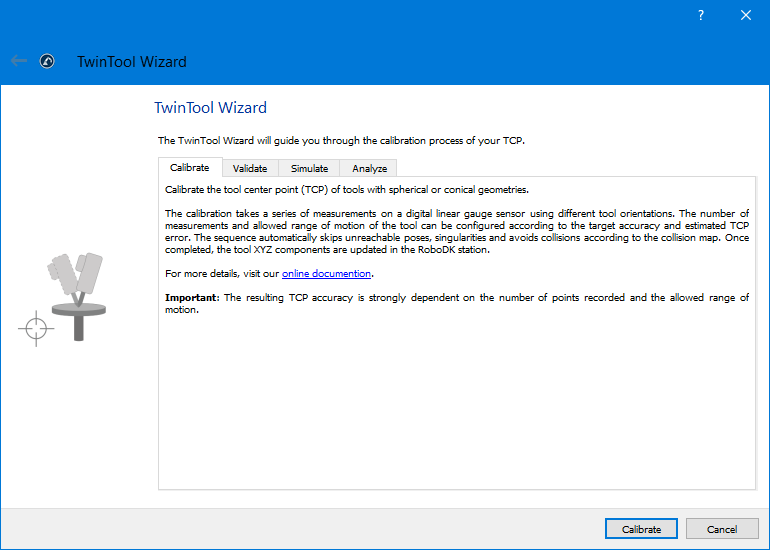
キャリブレーション・ウィザード
キャリブレーション手順を開始するには、TwinTool➔
ウィザードを起動すると、


ヒントロボットの可動域を変更するには、ZとXYの関節範囲を変更します。