バリデーション
較正シーケンスを実行したら、いくつかの検証テストを実行できます。これらの検証テストはセンサーの同じ場所でも、異なる場所でも可能です。
重要:リニアゲージの異なる場所で行った複数の較正シーケンスを組み合わせることはできません。ロボットを同じ場所で複数回校正することは可能で、センサーの同じ場所で収集されたすべてのデータが校正に使用されます。
ツールのキャリブレーションを検証
ウィザードから

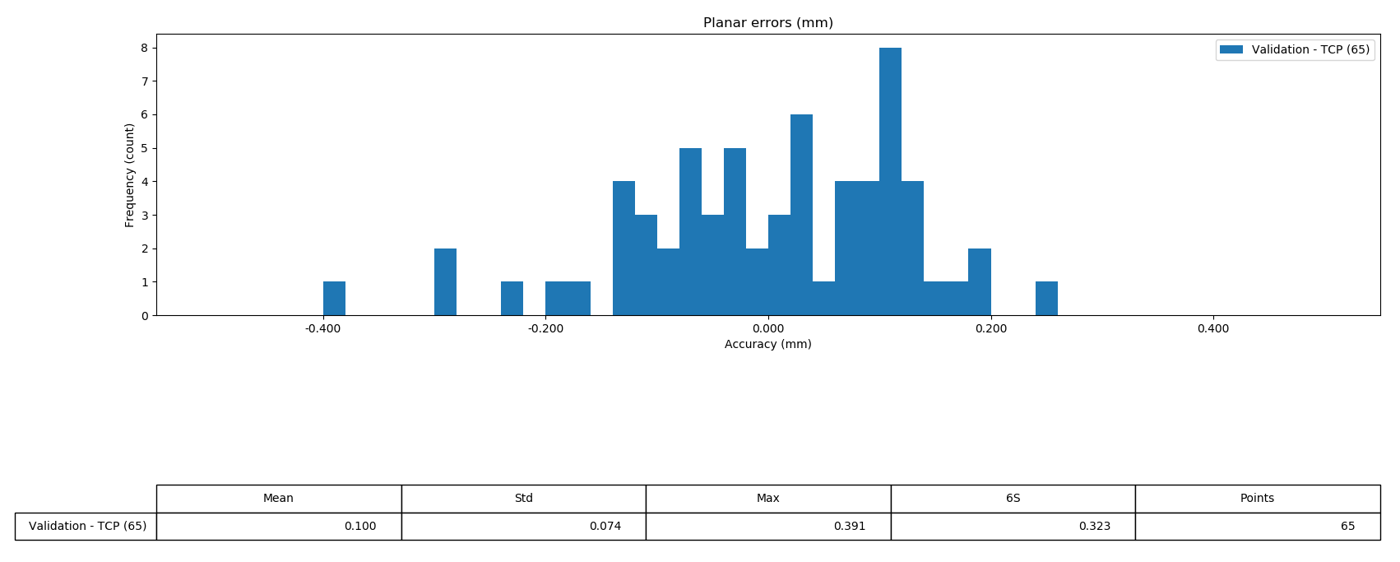
Validation を選択すると、結果の要約と統計が表示されます。これらの統計は、センサーによって検出された平面誤差に対応します。
ヒント:較正のために測定回数を増やすと、較正結果が著しく向上します。センサーターゲットの測定値を変更することができます(例えば、2 回目のキャリブレーションではデフォルトの 4mm ターゲットの後に 8mm ターゲットを使用します)。また、ロボットの構成を変更して、同じポイントで異なる関節角度で測定を行うこともできます(例えば、フリップ構成と非フリップ構成を使用)。